停車場實時語音導航及控制系統設計
2018-07-23 08:09:34阜陽師范學院計算機與信息工程學院劉飛彪馬鑫康劉夢會王中心
電子世界 2018年13期
阜陽師范學院計算機與信息工程學院 劉飛彪 馬鑫康 劉夢會 王中心
0 引言
停車場管理系統是由微機、管控設備、網絡設備搭建的一套對出入停車場車輛、引導車輛停車、計時收取停車費等進行管理的綜合系統。近年來,我國已成為世界最大汽車生產國與消費國,據權威部門數據顯示,截至2017年底,我國機動車總保有量達3.10億輛。停車場管理系統能夠實現對停車場內秩序的維持,極大的提高了停車場內車位的利用率,緩解當前停車困難的社會問題,因此其需求正在不斷地上升。本文重點探討了一種結合實時語音導航等功能的停車場管理系統的系統與軟硬件設計。
1 停車場實時語音導航及控制系統的系統設計
1.1 系統功能設計
本系統采用MCS-51單片機為主控制器,車輛進入停車場時,主控制器控制RFID模塊讀取IC卡中的信息后智能為車輛分配最優車位,并將分配的車位和停車時間等信息寫入IC卡芯片的對應區塊;同時控制顯示屏顯示相關信息(歡迎語、剩余車位信息、相關費用等),隨后語音模塊播放到達分配車位的導航信息。在車輛尋找車位的過程中,關鍵道口放置的實時導航模塊通過RFID技術檢測到持有IC卡的車輛經過時,自動讀取IC卡中存儲的車位信息并通過語音模塊播放對應的實時語音導航信息(例:前行、轉彎等),當車輛到達指定車位時,系統檢測到入庫正確后舵機控制升降桿,允許車輛進入;用戶取車時,可通過查詢模塊刷卡查詢車輛停放位置,方便用戶尋找車位。
1.2 系統總體結構圖(見圖1、圖2、圖3)

圖1 主控模塊
2 停車場系統的硬件設計
2.1 RFID模塊
本系統的RFID模塊采用RFID-RC522非接觸式讀卡器IC芯片。該芯片的射頻識別是一種無線數據通信技術,它成功地結合射頻技術和IC卡技術。該芯片具有64字節的發送和接收FIFO緩沖區,ISO14443 212kbit/s和424kbit/s的更高傳輸速度的通信,足以滿足系統對于檢測讀寫模塊的需求。

圖2 導航模塊
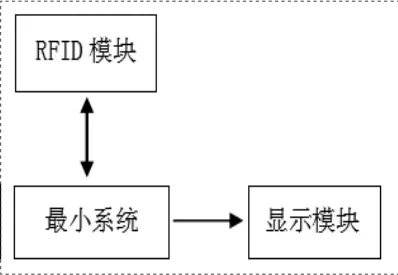
圖3 查詢模塊
2.1.1 主要特征
該模塊能可靠的識別高速移動或靜態目標;識別區域廣,無方向性,同時具有無盲區的特性。具有強信號穿透力與高度的安全性與保密性;便于安裝和維護。數據保存期長,存儲信息可改寫10萬次,無限次讀。
2.1.2 防沖突措施
當RFID模塊識別范圍同時出現多張IC卡時,防沖突措施會從這些IC卡中選擇一張進行操作,其余IC卡則處于空閑模式并等待在下次選卡過程被選中,同時被選中IC卡的序列號將被返回;該機制可有效解決多輛車同時出現在RFID模塊識別范圍的情況。
2.2 顯示模塊
系統的顯示模塊采用LCD12864液晶顯示屏,此顯示屏分辨率為128*64,內置中文字庫,可滿足系統顯示的基本需求。顯示屏由三個引腳RS、RW和EN控制基本命令的發送與八個數據引腳實現三態數據線功能,另外LCD12864液晶顯示屏還可以調節對比度,背光亮度。
2.3 語音模塊
系統語音模塊采用JQ8900芯片。該芯片支持SPIFLASH 模擬成U 盤,直接像操作U 盤一樣更新SPIFLASH 里的語音;并支持MP3 WAV 硬件解碼,指定曲目序號播放,以及音量設置等功能;此模塊使用方便,可以滿足系統對語音導航的需求。
2.4 舵機管控模塊
系統舵機管控模塊采用Futaba S3010舵機實現相關功能,此型號舵機具有扭矩高,成本低的特點,其工作電壓為6v,通過單片機控制高電平脈寬即可實現對舵機的控制。舵機旋轉位置與高電平脈沖時間的關系如表1所示:

表1 舵機旋轉位置與高電平脈沖時間的關系
2.5 主控模塊
主控模塊以STC11系列的51單片機為核心。其可在3.3V-5.5V的電壓下工作,內置的掩模ROM程序存儲器大小為32KB, RAM數據存儲器的大小為1024字節的,共有32條I/O線(4個8位并行I/O串口),工作的頻率為0-35MHz,并具有硬件看門狗,掉電喚醒專用定時器,啟動掉電喚醒定時器,全雙工異步串行口等功能,可以滿足對于控制系統的需求。
3 停車場系統軟件設計
3.1 具體軟件模塊及功能
[1] 中斷處理函數:void XTimer0Init(void) interrupt 1
功能:記錄停車時間以及其他模塊需要
[2] 延遲函數:void Delay1us(int T)
功能:用于單片機和其他模塊的串口通信延遲等需要
其他說明:不同的模塊函數中可能用到的延遲函數有所不同,但大體都是一樣的
[3] 初始化函數:void Start_up() ;LCD12864_Init()
功能:用于顯示、語音各模塊的初始化
[4] 寫卡函數:void Write_card()
功能:向IC卡中寫入信息。
[5] 讀卡函數:void Read_card()
功能:讀取IC卡中的信息。
其他功能:讀取M1卡一塊數據:char XPcdRead(unsigned char oddr,unsigned char *pData);
[6] 語音函數:void XSound(u8 m,u8 n); void XSendData (u8 addr)功能:控制語音播放。
[7] 舵機函數:void XFutaba()功能:控制舵機的轉動。
[8] 掃描函數:void Xscan()
功能:掃描結構體的所有屬性(所有停車位在一個二維數組中實現,數組中的每個項是車位的所有屬性的結構體,掃描結構體的每一個屬性,判斷改變的數值,實現不同控制)。
[9]主要函數:void main()
功能: 構建函數,連接函數,實現各個功能
其他說明:此函數具體實現各個模塊的初始化;用戶存車時,完成車位的分配與分配情況記錄;實現對顯示函數、語音函數的調用;車輛入位時,調用舵機函數;用戶查詢車位時,調用讀卡、顯示函數;用戶取車時,調用讀寫卡、顯示、語音函數。語音導航、字符顯示、用戶信息等內容分別儲存在特定的內存空間中。
3.2 系統處理流程
主控單片機處理過程如圖4所示。
其他說明:系統中的RFID模塊分為兩種:一種是遠距離RFID模塊,停車場的關鍵道口放置實時語音導航模塊采用此種模塊,以實現車輛在行駛過程中無須開窗即可提供實時語音導航服務;另一種是近距離RFID模塊,舵機管控模塊的RFID功能采用此模塊,避免遠距離檢測造成的誤識別情況的發生。

圖4 主控單片機處理流程圖
4 系統測試
測試使用五張已經寫好數據的IC卡模擬車輛進入與離開停車場的全過程進行測試測試結果如表2所示:

表2 測試匯報表
綜上,五次測試均符合系統要求,各模塊工作正常。
5 結語
停車場語音實時導航管理系統具有實施簡單、智能便捷和人性化等優點。在大型停車場的停車高峰期時,停車、取車時,停車位的尋找較為困難,此系統巧妙的解決了這些問題。此外,靈活多變的經營方式,輕松方便的使用體驗,簡單可行的硬件設備,不算高昂的安裝成本,使本系統具有良好的市場前景。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20