基于傳感器技術的平板電視非接觸式定位的實現及應用
2018-07-23 08:09:42深圳創(chuàng)維RGB電子有限公司
電子世界 2018年13期
深圳創(chuàng)維-RGB電子有限公司 閆 勇
一、引言
(一)傳統(tǒng)的機械定位與視覺定位對比
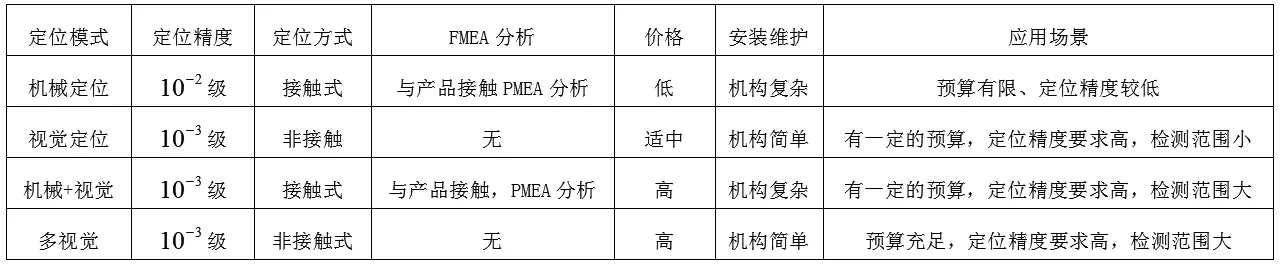
表1 機械定位與視覺定位比較
(二)定位模式選擇分析
由表1可見,定位模式的選擇與應用場所、技術精度、預算都有關系,在項目應用中可進行甄別選擇。
1.機械定位造價低廉,但定位精度有限,且與產品直接接觸,存在損傷產品的可能;
2.視覺定位造價較高,定位精度高,與產品不接觸,安全可靠。
由此闡述一種安裝簡單,定位精度可控,且造價低廉的非接觸式定位方法。
二、具體實現方法
(一)應用背景
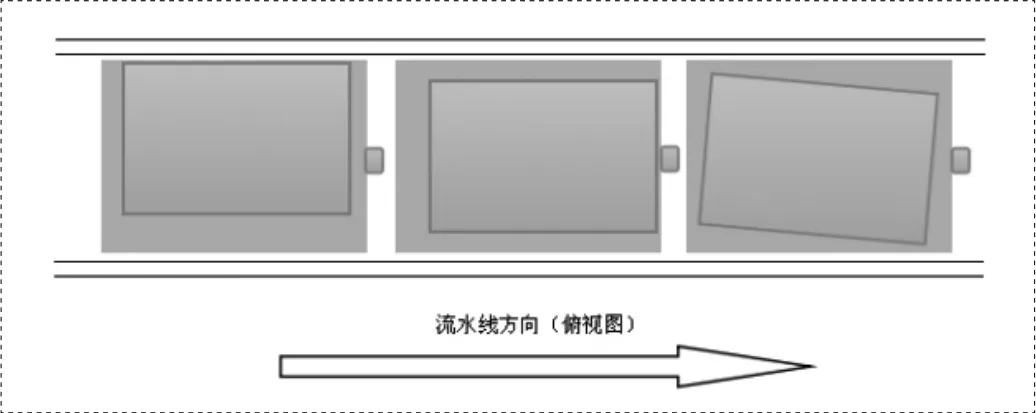
圖1 應用背景圖示
圖1所示為彩電生產過程中,電視機在流水線上進行裝配的工位示意圖,電視機在流水線上進行裝配時,由于工裝板的沖撞、人員的拉動等因素每款電視機在流水線上裝配生產中存在前后、上下及角度的不確定變化,如圖所示。前后:流水線方向的前后;上下:電視機的天側地測的上下,即垂直于流向方向的偏差;角度:電視機在工裝板平面的角度偏移。
電視機產品為超薄、超大屏體,需要采用非接觸式的視覺定位才能解決以上產品的定位問題,且由于相機視野大小及定位精度的需求,單個相機無法滿足定位需求。
(二)解決方案
運用傳感器技術,結合軟件算法實現非接觸定位需求。具體如圖2所示,通過感應器1,2,3測試相關數據,通過數據分析幾何計算即可獲取到電視機在載體上的位置(前后、上下、角度)。
1.示意圖具體說明
流水線:彩電生產線,工裝板放置在流水線上,通過阻擋器的控制流水作業(yè);
阻擋器:阻擋工裝板;
工裝板:在流水線上回流,電視機的載臺;
感應器1,2:安裝在線體邊緣的固定位置,用于測距;
感應器3:安裝在本工位機械手上,用于檢測電視機邊緣。
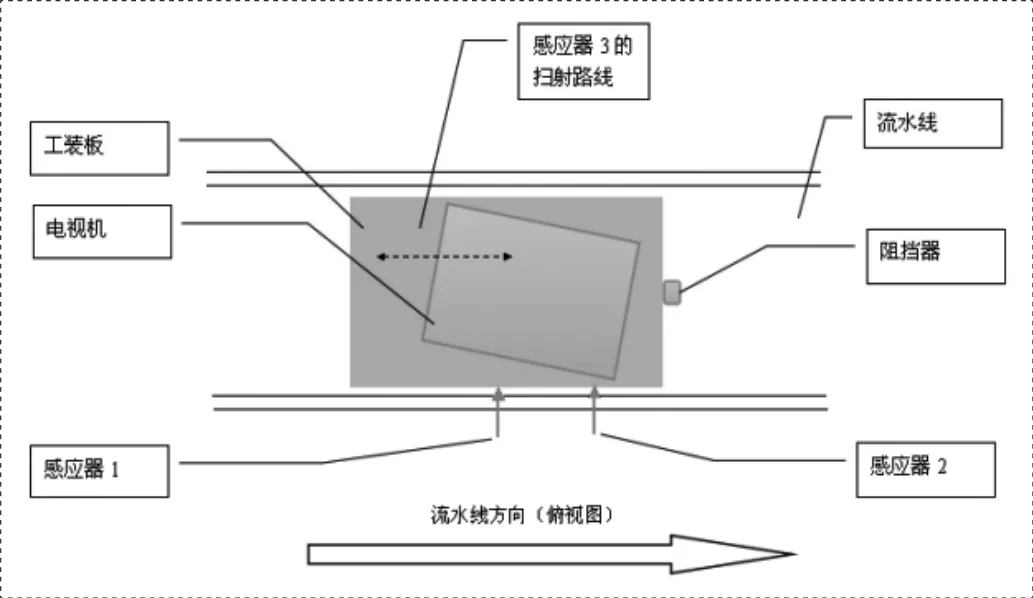
圖2 傳感器安裝示意
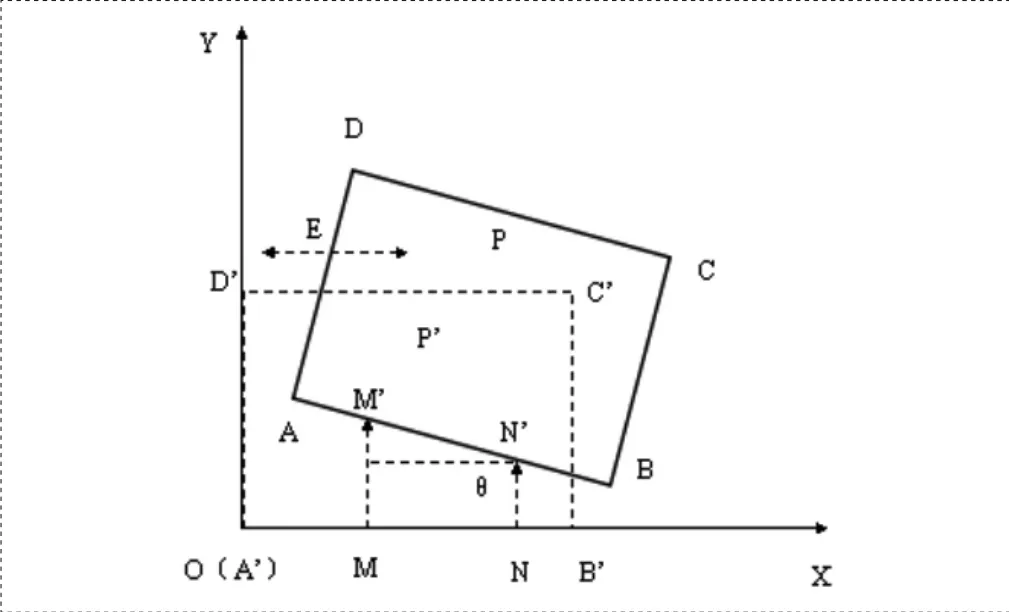
圖3 建模圖
2.建模
如圖3所示,建立O-XY坐標系,設O(0,0)為原點,工裝板的左下角位置,X軸為流水線方向,Y軸為水平垂直于流水線的方向;矩形ABCD為平板電視機,P(x,y)為電視機平面任一待測目標點,M、N為感應器1,2的安裝位置,M’、N’為測距傳感器與電視機的交匯點,矩形A’B’C’D’為將電視機擺正的位置點,E點為感應器3掃射與電視機AD邊的交點,θ為電視機在工裝板上的偏移角度,P’(x0,y0)為電視機擺正后的目標點,點位可測。
3.算法
由上述,設O(0,0);M(a,0);N(b,0);P’(x0,y0)為已知量;
由傳感器1,2可測得,MM’=c,NN’=d;由傳感器3可測得E(e,f);
電視機傾斜角θ=arctan(c-d)/(b-a);
直線AB的斜率k1=arctan(c-d)/(b-a);
M’的坐標為M’(a,c),N(b,d);
因為,直線AD與直線AB垂直,則直線AD的斜率k2=-1/k1;
根據M’(a,c),及k1可得直線AB的方程為:y=k1(x-a)+c;
根據E(e,f)及k2可得AD的方程為:y=-1/k(x-e)+f;
根據AD、AB的方程可得A點的坐標:x,x
P點的坐標為P’坐標加上A’到A坐標的偏移量:
x=x0+xcosθ;
y=y0+xsinθ;
由此便得到了目標點的坐標值,完成了目標點位的獲取。
三、小結
本文闡述了一種,簡單、實用、方便,性價比高的基于傳感器技術的非接觸式定位的實現方法,定位精度可控(基于傳感器的精度),可應用于平面型產品自動化的定位,輔助定位,如條碼采集的實現等。
四、展望
隨著原材料成本及人力成本的逐年上漲,加之行業(yè)競爭越來越激烈,制造業(yè)尤其是彩電行制造業(yè)盈利點被極致壓縮,所以制造業(yè)的轉型升級是每個制造型企業(yè)當面臨的重要抉擇。傳統(tǒng)的制造向智能制造轉型無疑是一個行業(yè)趨勢,在制造業(yè)推進智能制造的同時,也是需要應用一些實用性強、性價比高、滿足工廠需求的技術創(chuàng)新點,高性價比的創(chuàng)新技術的大量應用能很大程度上為工廠降低成本,積累創(chuàng)新型的應用技術,為企業(yè)的轉型升級貢獻力量。