基于拖曳式干擾機的ISAR微動散射波干擾方法
2018-07-31 03:34:30唐崢釗董春曦暢鑫劉明明趙國慶
航空學報 2018年7期
唐崢釗,董春曦,暢鑫,劉明明,趙國慶
西安電子科技大學 電子工程學院,西安 710071
逆合成孔徑雷達(Inverse Synthetic Aperture Radar, ISAR)憑借全天時、全天候、高分辨的特點,已被廣泛應用于目標分類、敵我識別、武器精確制導等軍事領域[1-5]。近幾年來,從激光雷達中引入的微多普勒效應為ISAR目標的精確識別提供了重要的輔助信息[6-7]。根據目標微動對電磁波的調制效應分析可知,利用先進的時頻信號處理手段, 可以從微動目標的雷達回波中提取和估計目標微動信息,如速度、姿態變化等[8]。在微動目標的成像方面,可以綜合利用多個時刻微動目標的成像結果估計目標的微動結構、微動尺寸和微動頻率等信息對雷達目標的探測和識別提供有效途徑,為目標的精細描述提供技術基礎[9-10]。
同時目標微動信息也對ISAR壓制干擾技術產生一定影響。傳統ISAR壓制干擾方法包括:射頻噪聲壓制干擾,文獻[10]提出的基于正弦調相的干擾方法,文獻[11]提出的混沌噪聲調頻干擾方法,文獻[12]提出的一維距離像噪聲卷積的干擾方法等,均通過發射大功率干擾信號達到壓制干擾效果。非相參射頻噪聲干擾信號易被ISAR二維脈沖壓縮處理濾除,對干擾成本要求較高。而相參噪聲調制干擾信號雖可獲得二維脈壓處理增益,但需直接對ISAR接收機發射干擾信號,對偵查精度要求較高,且在距離ISAR接收機較遠情況下仍需較大發射功率。
從現有公開發表文獻來看,目前基于微多普勒效應的ISAR干擾技術研究成果并不多見[13-22],文獻[13]提出通過放置旋轉角反射器產生微多普勒效應的ISAR干擾方法,該方法需要多個旋轉角反射器距離向布陣,且旋轉半徑、旋轉速度必須綜合考慮,這就加大了工程實現難度,且微動信息固定,干擾效果無法根據需要實時調整。文獻[14]提出了基于數字圖像合成器的微動干擾方法,通過合成旋轉微動假目標點產生ISAR欺騙干擾,該方法在調制微動信息的同時還需進行延遲和移頻處理,占用硬件資源較多且處理過程較為復雜,干擾效率受限。
本文在現有研究基礎上,參考雙基ISAR工作原理[23-24],提出了基于拖曳式干擾機的ISAR微動散射波干擾方法。該方法將ISAR發射機與拖曳式干擾機[25-27]分別等效為雙基ISAR的發射機與接收機,干擾機對截獲的ISAR發射信號調制附加微動信息相位并轉發至目標,由目標散射至ISAR接收機。由于干擾機與目標距離較近,可獲得較大散射功率。同時干擾信號與真實目標回波相參,可獲得ISAR二維脈沖壓縮處理增益,因此該干擾方法能以較小功率實現ISAR壓制干擾效果。
1 干擾信號模型
目標常見微動形式有飛機螺旋槳的旋轉、直升機旋翼的旋轉和渦輪式發動機葉片的旋轉等,不失一般性,以旋轉運動為例進行分析。
干擾場景模型如圖1所示,拖曳式干擾機由被保護目標通過拖曳線牽引而隨其一起運動。與SAR散射波干擾類似,干擾機對截獲到的ISAR發射信號進行相位調制后轉發至被保護目標,經目標散射至雷達接收機。干擾機與雷達接收機可等效為雙基ISAR的發射站與接收站。以雷達視線方向為y軸,目標質心O為原點建立坐標系xOy,同時在目標上以O為原點,等效雙基角平分線為v軸(以目標質心O為散射點時)建立本地坐標系uOv。假設目標為經過理想運動補償的轉臺模型,繞點O做初相為θ0、角速度為ω0的轉動。假設微動假目標點P(uP,vP)在目標上,且繞其旋轉中心O1做半徑為rP、初相為θP、角速度為ωP的勻速圓周運動,α為點P對應等效雙基角;RO、RP、RO1分別為點O、點P和點O1與雷達間距離;RJO、RJP、RJO1分別為點O、點P和點O1與干擾機間距離;RO O1為點O和點O1間距離。
設干擾機截獲雷達發射的線性調頻脈沖信號為
(1)
設tm時刻干擾信號歷程為RJPR(tm)=RJP(tm)+RP(tm),RJP(tm)為干擾機與微動假目標點P間距離;RP(tm)為微動假目標點P與雷達接收機間距離。則由圖1得
RP(tm)=RO+RO O1+rPsin(θP+ωPtm)+
(2)
RJP(tm)=RJO1+rPsin(θP+ωPtm)+
(3)
設干擾機轉發時延為td,σP為點P散射系數,則點P散射回波信號為
(4)
式中:
(5)
由式(4)與式(1)對比可知,φP(tm)為包含微動信息的干擾機調制相位。干擾信號經過匹配濾波歸一化后的一維距離像為
(6)
進行方位向傅里葉變換后即可獲得干擾信號二維距離-多普勒像表達式為
(7)
式中:Jn(·)為n階第一類貝塞爾函數;微動假目標點P引起的多普勒頻率為
(8)
由式(8)可知,當微動假目標點P轉速為0時,干擾信號可聚焦為二維sinc函數,從而產生與真實目標相似的二維假目標圖像,但較真實目標圖像旋轉α/2度。當點P旋轉速度不為0時,干擾信號由于方位向受到頻率調制而展寬,其ISAR圖像出現干擾條帶。
2 干擾參數分析
以圖1中點O為參考點,則點O和微動假目標點P散射信號功率分別為
(9)
(10)
式中:Pj為干擾機發射功率;Gj為干擾天線增益;σO、σP分別為點O、點P散射截面積;RJP為干擾機與點P距離;RP為點P與雷達距離;Pt為ISAR發射功率;G為ISAR天線增益;λ為信號波長。
由于RO O1?RO,RP≈RO,σP≈σO則ISAR接收機輸入端干信比(Jamming to Signal Ratio, JSR)為
(11)
由式(11)可知,在干擾機發射功率Pj和天線增益Gj、雷達發射功率Pt和天線增益G固定的情下,由于RJP遠小于R0,可獲得較高干信比。
圖2給出了Pj=120 W,Gj=10 dB,Pt=1 600 KW,G=30 dB,RO分別為200、500、800 km時ISAR接收機輸入端JSR隨RJP的變化曲線。由圖2可以看出,ISAR接收機輸入端JSR與RJP成反比,因此由于拖曳式干擾機距離目標較近,通常可獲得較大干擾功率,在隨隊支援干擾等戰術背景中較為適用。
設雷達、目標與干擾機相對位置不變情況下,干擾機先后以相同發射功率、天線增益向雷達方向發射相參干擾信號和射頻噪聲信號。設nr、na分別為雷達信號處理機距離維、方位維單元數,PJ為兩種干擾信號到達ISAR接收機輸入端功率。由于射頻噪聲與信號非相參,則其經二維脈壓處理后信號處理器輸出端功率為
PJn=PJnrna
(12)
相參干擾信號經二維脈壓處理后信號處理器輸出端功率為
(13)
可知經過ISAR接收機信號處理,相參干擾信號比射頻噪聲信號增益高nrna倍。
3 仿真實驗
3.1 仿真流程及參數設置
目標采用理想散射點仿真模型,首先模擬干擾機截獲到的ISAR信號,對其進行微動信息調制后延時轉發,經目標散射至ISAR接收機,經二維Range-Dopplor(R-D)成像處理后形成距離-多普勒頻率。仿真流程如圖3所示。仿真雷達及目標參數設置如表1所示。
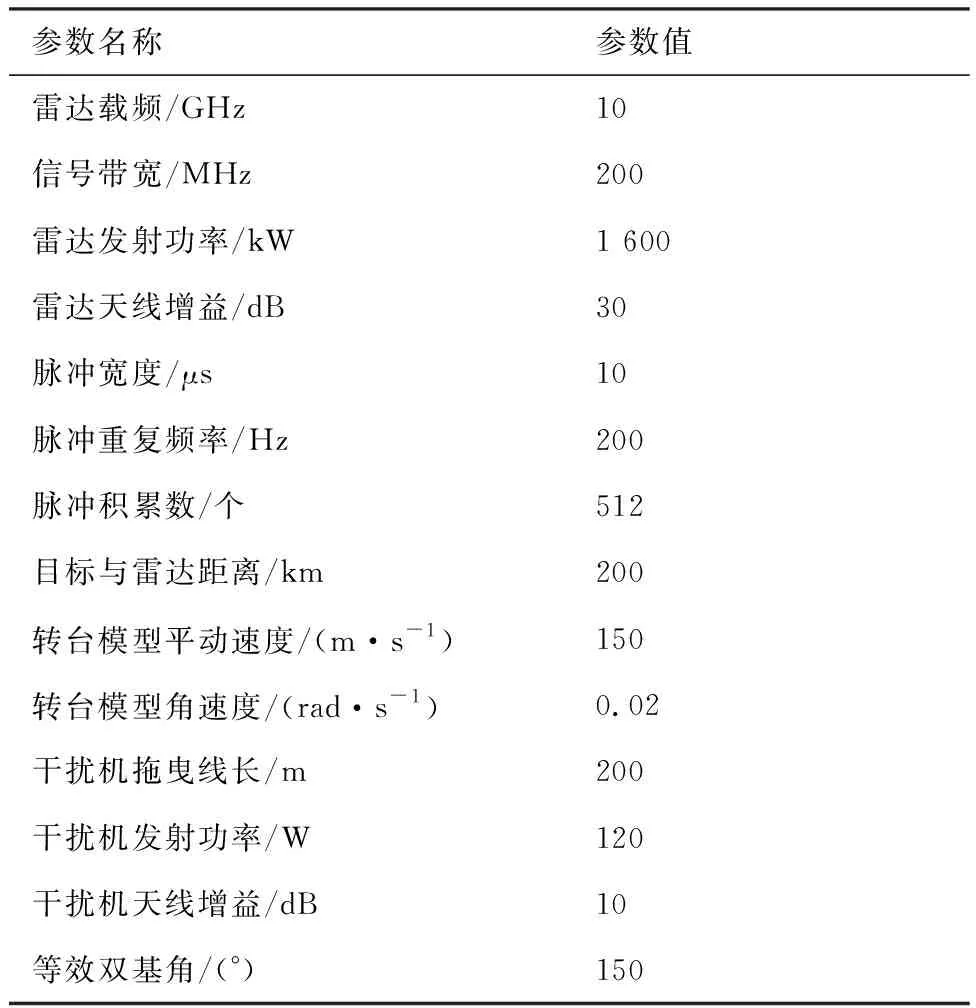
參數名稱參數值雷達載頻/GHz 10信號帶寬/MHz200雷達發射功率/kW1 600 雷達天線增益/dB30脈沖寬度/μs10脈沖重復頻率/Hz200脈沖積累數/個512目標與雷達距離/km200轉臺模型平動速度/(m·s-1)150轉臺模型角速度/(rad·s-1)0.02干擾機拖曳線長/m200干擾機發射功率/W120干擾機天線增益/dB10等效雙基角/(°)150
3.2 仿真結果及分析
圖4給出了無干擾時散射點模型成像結果,對應圖1中真實目標部分。
圖5為干擾機多次轉發干擾效果,微動點旋轉半徑均為3.5 m,旋轉角速度均為20 rad/s,ISAR接收機輸入端干信比為16 dB。可見真實目標圖像附近出現大量假目標,且微動特征一致,使真實目標淹沒于多假目中難以分辨,達到密集假目標壓制干擾效果。
圖6為微動假目標點角速度降為10 rad/s,其他參數不變條件下干擾效果,可以看出微動點旋轉角速度對方位向干擾條帶疏密程度造成影響,旋轉角速度越大則對應干擾條帶密集程度越高。圖7給出了壓制干擾效果。為擴大微動假目標點運動半徑以達到遮蓋真實目標效果,將微動點旋轉半徑增大至7 m,旋轉角速度均為20 rad/s,ISAR接收機輸入端干信比提高至18.5 dB。可見真實目標圖像被方位向干擾條帶遮蓋難以分辨,達到壓制干擾效果。
圖8為相同仿真場景下,將干擾樣式改為射頻噪聲干擾的仿真效果圖。此時ISAR接收機輸入端干信比為28.3 dB。對比圖7可知,達到遮蓋真實目標圖像干擾效果時,傳統射頻噪聲壓制干擾方法需更大的干信比,在本次仿真實驗場景中干信比高于微動散射波干擾方法約9.8 dB。由此可知基于拖曳式干擾機的ISAR微動散射波干擾方法能以較小成本達到壓制干擾效果。
仿真結果驗證了前文干擾方法理論分析的結論。
4 結 論
1) 干擾信號由目標散射至雷達,因此對雷達方位信息偵查精度要求較低。
2) 干擾機與目標距離較近,易獲得較大散射功率,且干擾信號與雷達信號相參,可獲得ISAR二維脈壓處理增壓,對干擾成本要求較小。
3) 通過控制干擾機轉發參數及微動調制參數可分別實現不同的壓制干擾效果,與傳統壓制干擾方法相比干擾效果較為靈活可控,是一種對抗ISAR目標分辨與識別的有效手段。
