弧形深松鏟工作過程和松土效果的離散元法仿真分析
2018-08-01 07:53:28李玲玲李廣宇張煜晗袁洪印
江蘇農業科學 2018年13期
李玲玲, 李廣宇, 張煜晗, 袁洪印
(1.長春科技學院汽車機械工程分院,吉林長春 130600; 2.吉林省農業機械研究院,吉林長春 130022)
深松鏟在耕作過程中,會使土壤發生破裂和移動等動態行為,即土壤顆粒之間及土壤顆粒與深松鏟之間發生相互運動。深入研究深松鏟與耕作土壤相互作用的動態過程,才能夠設計出省力、高效的深松鏟形,進而減小深松鏟的工作阻力[1]。離散元法是描述每個獨立單元運動及位置的一種數學方法[2-3]。土壤作為一種復雜的多相混合體,其顆粒本身具有離散性質,顆粒群在運動過程中具有分散性,用基于連續、均勻的力學理論分析外力作用下的土壤動態行為變化過程顯得很勉強,因此采用離散元法進行分析較理想[4-5]。
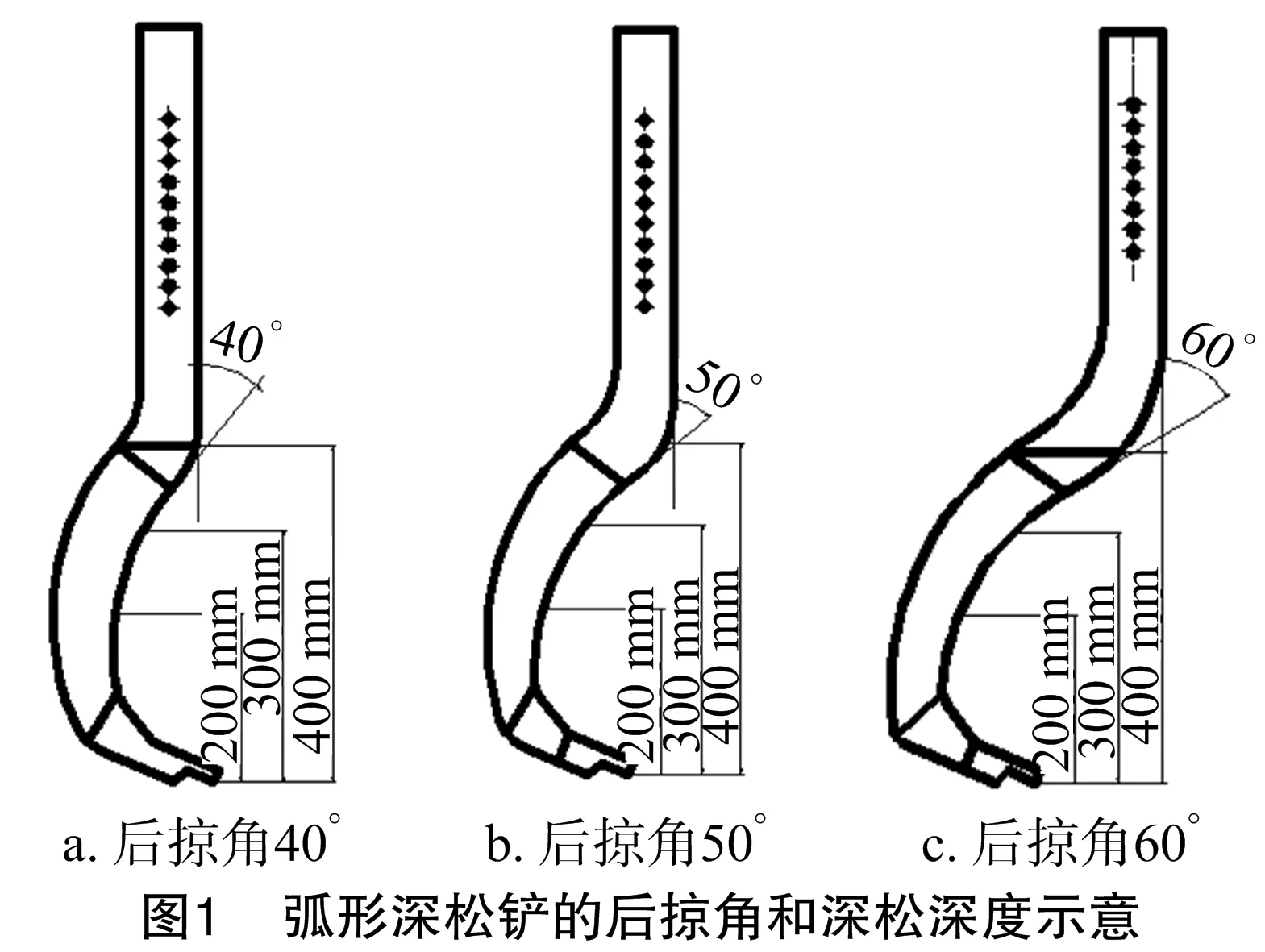
本研究選用3個具有不同后掠角的弧形深松鏟為研究對象(圖1)。后掠角即深松鏟柄上部垂直部分迎土邊垂直線與相連的下部圓弧部分上端切線形成的夾角。采用離散元法模擬分析弧形深松鏟的工作過程以及松土效果[6],并將離散元法的分析結果與田間試驗結果進行對比,探討應用離散元法分析深松鏟工作過程及松土效果的可行性。
1 模型建立與參數選取
1.1 邊界模型建立與參數選取
采用離散元法仿真分析深松鏟的工作過程,研究邊界模型與土壤顆粒的接觸情況,并對邊界受力情況進行分析。邊界模型即為深松鏟模型,本研究采用PROE三維軟件建立深松鏟邊界模型,深松鏟泊松比為0.28,剪切模量為2.1×1011Pa,密度為7 800 kg/m3,將邊界模型的材料參數及運動屬性存入數據庫中,以備后續模擬時調用。
1.2 土壤顆粒模型建立與參數選取
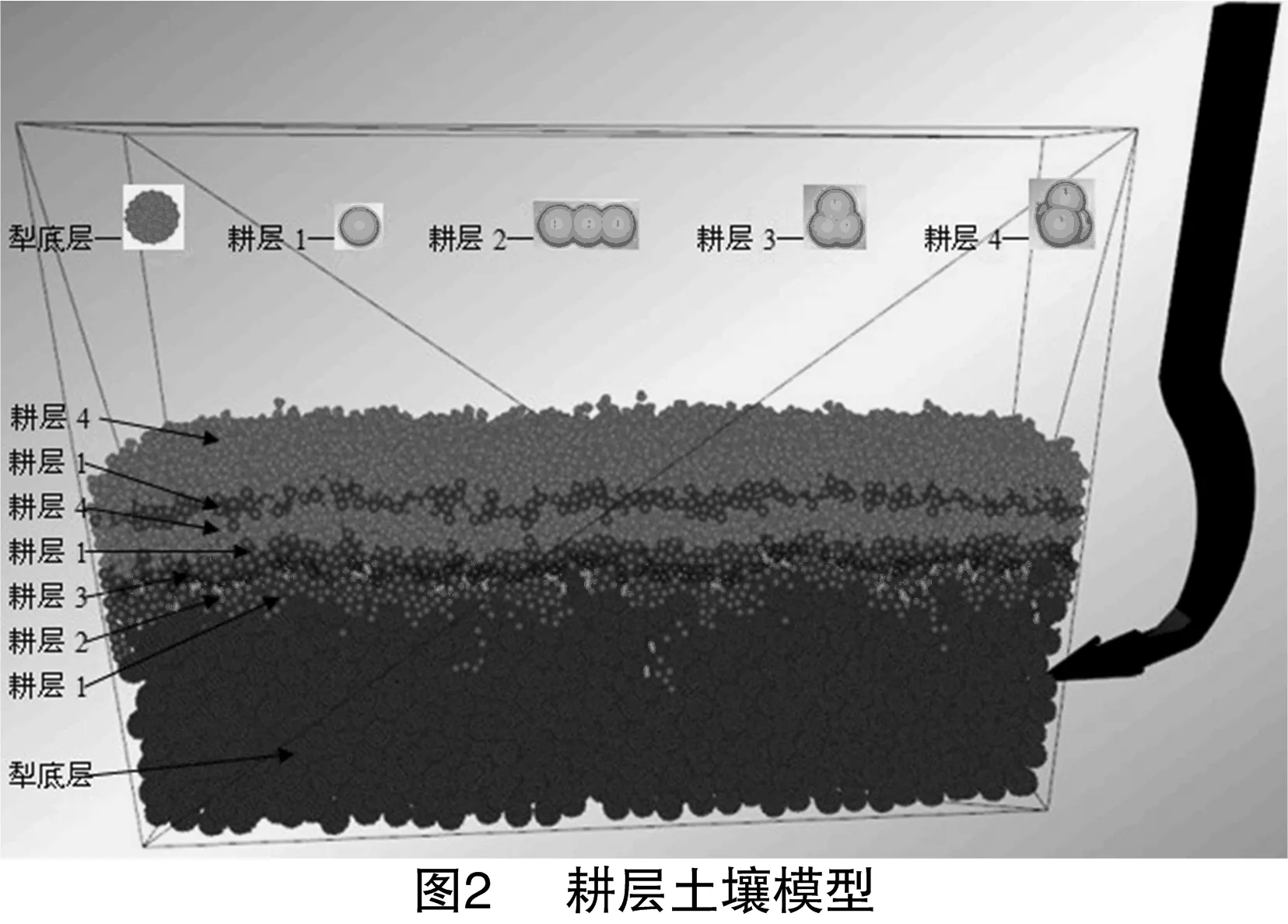
1.2.1 耕層土壤顆粒模型的生成 耕層土壤為距離地表 16~25 cm的土壤,孔隙度大,透氣性好。土壤顆粒形狀復雜,多為團狀、片狀、核狀和柱狀,根據實際耕層土壤顆粒的結構、粒徑等情況,將耕層土壤分為7層,對球形顆粒[8]進行不同形式的組合,共建立4種土壤顆粒模型,如圖2所示。
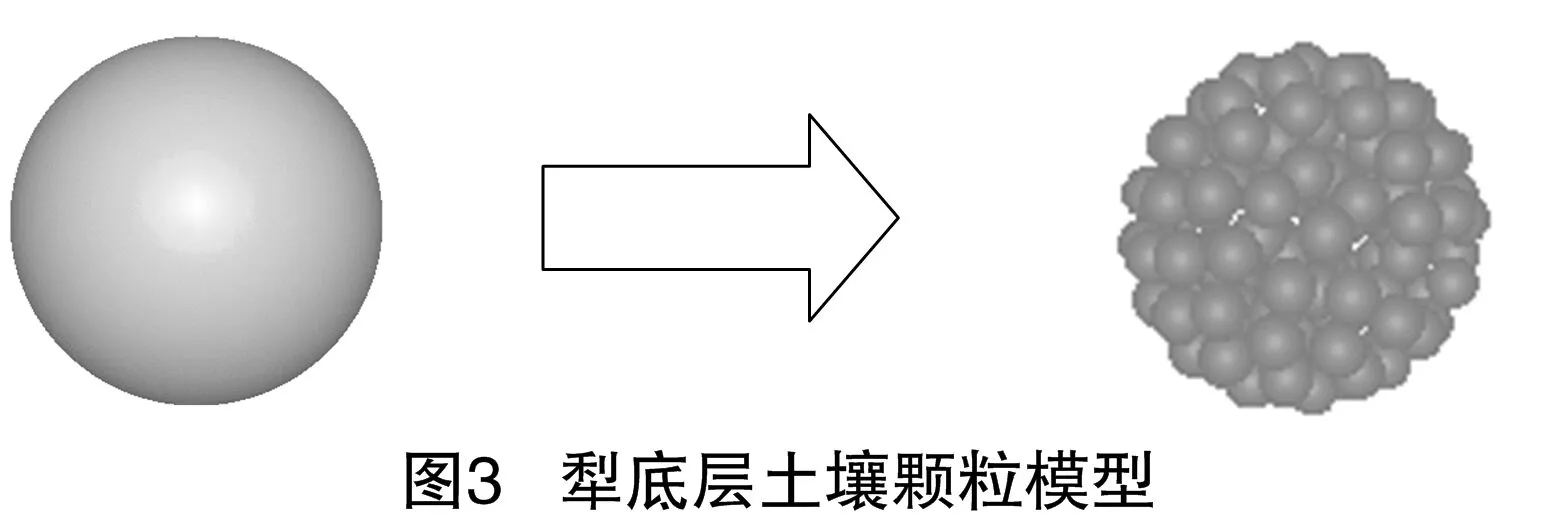
1.2.2 犁底層土壤顆粒模型的建立 犁底層為距離地表 20~40 cm的土層,該層土壤含水率較大,存在明顯的黏結現象,顆粒間粘附力大,為建立與實際犁底層土壤結構相近的土壤模型[7-8],且能清晰地觀察土壤團塊在深松鏟作用下破碎成小團塊或單個土壤顆粒的過程,結合應用程序接口(application programming interface,簡稱API)顆粒替換法實現土壤的黏結屬性。API顆粒替換法即通過API讀取顆粒模板數據,將原始單顆粒替換為新的顆粒群的方法。
設置顆粒間的切向最大應力、法向最大應力、彈性模量、土壤顆粒黏結開始時間(黏結時間早于開始替換的時間)、剪切模量。圖3為最后生成的犁底層顆粒模型。
以吉林省長春地區壤土作為研究對象,并通過“烘干法”測定得到,耕層土壤和犁底層土壤的含水率分別為(21.15±1.00)%、(25.64±1.00)%。采用環刀法測定得到,土壤的密度范圍為1.21~1.48 g/mm3。土壤顆粒間及顆粒與邊界間的法向剛度系數(kn)和切向剛度系數(ks)可分別通過離散元三維軟件模擬土壤的三軸試驗和直剪切試驗得到。顆粒與土槽邊界間的阻尼系數由下式計算得到
式中:碰撞恢復系數e=0.1~0.3;m為單土壤顆粒質量;k為彈簧剛度。仿真時選取的土壤顆粒參數值見表1。
2 深松鏟的受力仿真分析與松土效果的仿真分析
2.1 工作阻力仿真分析
在不翻動土壤的情況下,打破犁底層的板結土塊是深松鏟的工作性能,結合實際工作情況,分別模擬不同深松鏟在不同深松深度及工作速度下的深松過程[9-10]。由表2可知,通過模擬得到3種深松鏟在不同深松深度與工作速度下的工作阻力,隨著深松鏟的不斷入土,鏟子所受水平阻力不斷增加,當深松鏟完全入土后,在工作速度與深松深度不變的情況下,不同后掠角的深松鏟所受水平阻力大小接近。
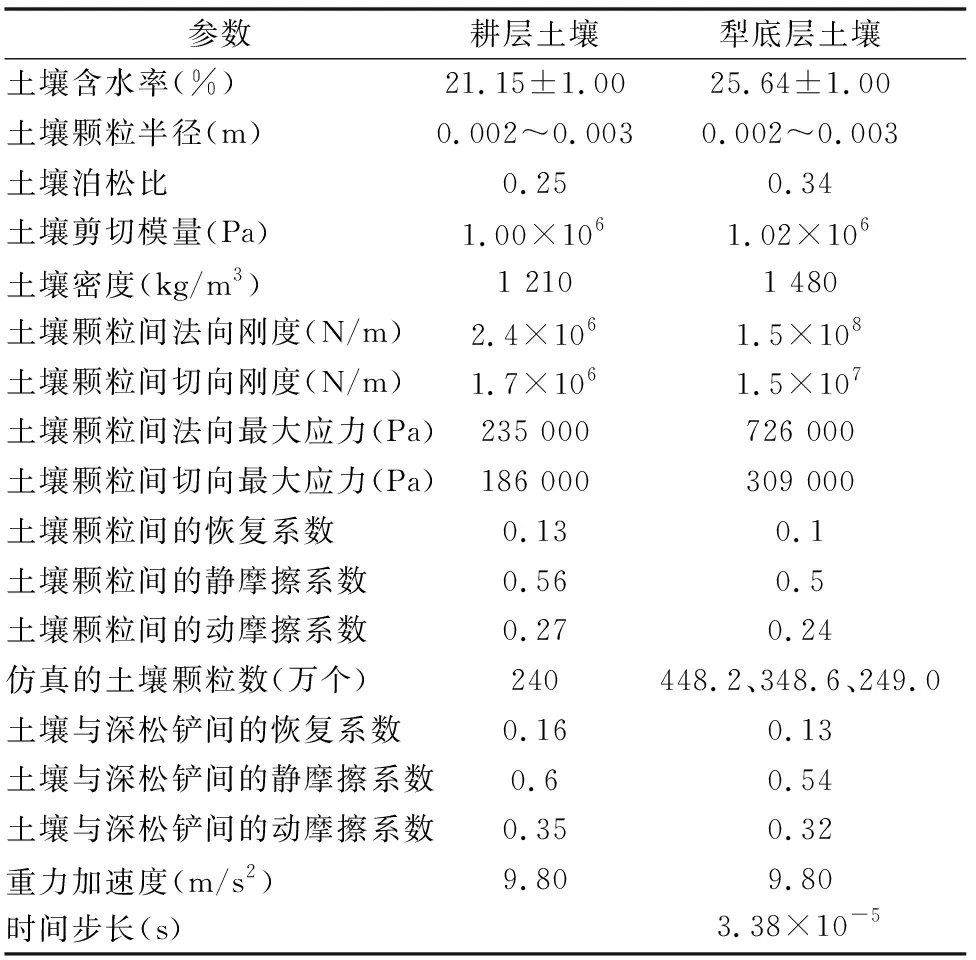
表1 離散元法仿真分析時參數的選取
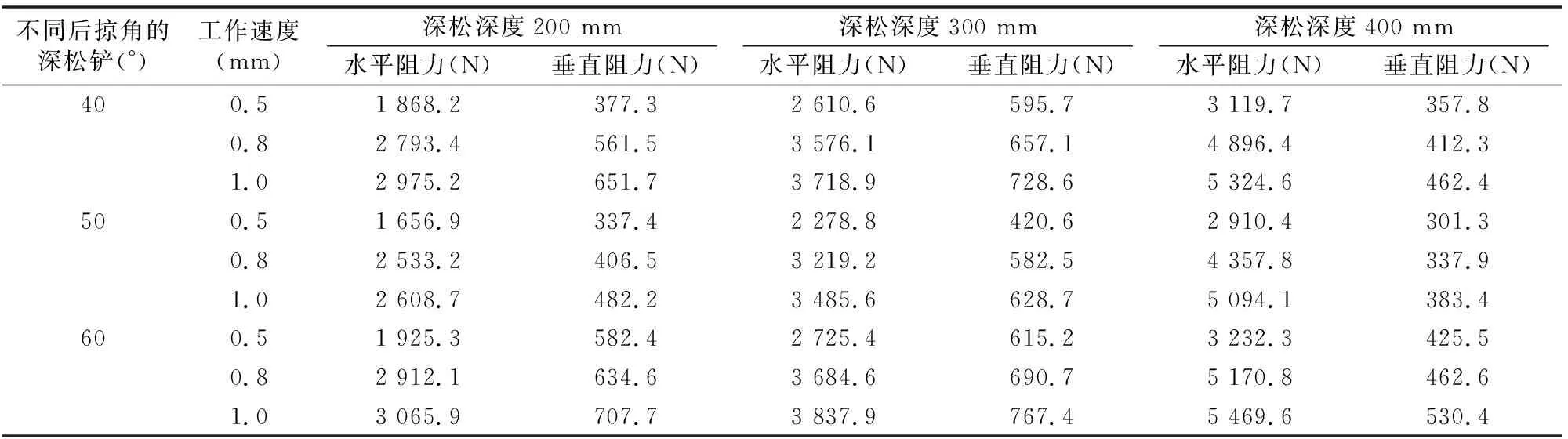
表2 3種深松鏟在不同深度與速度下的工作阻力
深松深度對深松鏟的阻力影響較大,后掠角度的影響較小;通過分析比較得出,在深松深度與工作速度相同的條件下,后掠角為50°的深松鏟所受水平阻力與垂直阻力最小,且垂直阻力遠小于水平阻力對深松鏟的影響,可忽略不計。
2.2 松土效果仿真分析
深松鏟在工作過程中,土壤會發生平動、轉動現象。犁底層土壤團聚體的破裂平移可使小粒徑土壤數量越來越多,土層透氣性越來越好,有利于植株根系的向下生長;通過高清攝像機觀察發現,破碎的小顆粒與耕層土壤顆粒接觸得越少,表明深松鏟只打破犁底層而不翻轉土層的性能越好[11]。因此,為分析土壤內部的微觀變化,本研究基于土壤的物理力學性能和建立的邊界模型與土壤力學模型,通過離散元法仿真分析土壤顆粒的運動情況及土壤團聚體的破碎情況,如圖4所示。

根據仿真結果得到,不同深松深度與工作速度條件下,不同后掠角深松鏟在工作過程中,破壞的土壤黏結顆粒數不同。由于土壤顆粒本身具有隨機性,本研究進行5次仿真模擬,取其平均值。為更直觀地比較不同深松鏟的松土效果,將深松鏟在不同深松深度、工作速度條件下,犁底層土壤顆粒的黏結破壞情況繪制成折線圖,如圖5所示。
由圖5可知,當工作速度與深松鏟類型(后掠角為50°)相同時,隨著深松深度的增加,土壤黏結顆粒被破壞成小顆粒的數量增多;當深松深度與深松鏟類型(后掠角為50°)相同時,工作速度越快,土壤黏結顆粒被破壞成小顆粒的數量越多;當工作速度為1 m/s,深松深度為400 mm時,后掠角為50°的深松鏟,破壞的土壤黏結顆粒數最多,松土效果最好,后掠角為60°的深松鏟破壞的土壤黏結顆粒數最少。
3 田間試驗設計
3.1 工作阻力的田間試驗
為驗證離散元仿真結果的有效性,通過田間試驗采集不同工況下深松鏟的工作信號并進行處理分析得到深松鏟在工作過程中受到的阻力情況及其松土效果[12]。深松試驗所需的動力由CT904輪式拖拉機提供,在其上拉桿及下懸掛銷處分別安裝傳感器,并用通用電纜將傳感器接口與數據采集接口進行連接,通過數據轉換實現水平阻力和垂直阻力的測定。試驗現場如圖6所示。
由于影響深松鏟工作阻力的因素很多,且土壤顆粒結構復雜,因此,本研究在對試驗結果進行分析時,針對不同的工作條件(工作速度和深松深度),分別進行5次試驗,然后取其平均值。

3.2 松土效果的田間試驗
通過對土壤蓬松度及碎土效果進行測試,綜合反映深松鏟的松土效果。深松前后,在與深松機前進的垂直方向上,用耕層斷面測繪儀在同一位置先后畫出未耕地表線、己耕地表線和溝底線,計算耕前、耕后的土壤截面積,相同行程內測定5次,取其平均值,得出土壤蓬松度。深松后,通過測定土層斷面內每10 cm深度土塊的平均中徑來判斷碎土效果。
4 結果與討論
根據仿真結果得出,后掠角為50°的深松鏟在工作過程中,所受工作阻力最小,且松土效果最佳,因此本研究分別從工作阻力和松土效果2個方面,對后掠角為50°的深松鏟的仿真結果與試驗結果進行對比分析。
4.1 工作阻力的仿真與試驗對比
由于垂直工作阻力對深松鏟的工作性能影響不大,因此本研究只對水平工作阻力的仿真結果與試驗結果進行對比分析。由表3可知,水平阻力仿真值與試驗值的變化趨勢基本相同。隨著深松深度的增加,水平阻力明顯增大;工作速度對水平阻力的影響不明顯。當深松深度為400 mm,工作速度為1 m/s時,相對誤差最大,為24.7%。

表3 水平阻力仿真與試驗對比
4.2 松土效果的仿真與試驗對比
由表4可以得出,后掠角為50°的弧形深松鏟深松后,土壤膨松度提高27.89%。由表5可以得出,在耕深為20~30 cm 的土層中, 土塊中徑的平均值為3.0~5.0 cm,碎土效果較明顯;在耕深為30~40 cm的土層中,土塊中徑的平均值為1.0~1.5 cm,細碎均勻。

表4 土壤膨松度測試
5 結論
基于離散元基本理論建立耕層及犁底層土壤顆粒模型,并確立仿真參數。仿真分析深松深度、工作速度對深松鏟工作阻力和松土效果的影響。在深松鏟整體受力方面,仿真結果與田間試驗結果基本吻合。仿真結果與田間試驗結果誤差在11.4%~24.7%范圍之內,證明模擬建立的模型及選取的參數是合理的,采用離散元法仿真分析深松鏟工作過程和松土效果具有可行性。
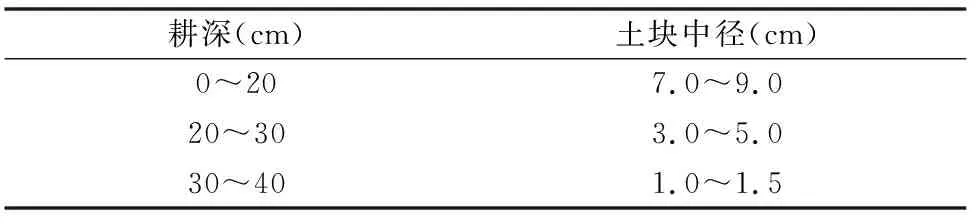
表5 碎土效果試驗
在松土效果方面,通過對比分析,仿真結果與試驗結果得出,后掠角為50°的弧形深松鏟在深松后, 土壤黏結顆粒破碎的個數最多,土壤膨松度高,松土效果最佳。
通過對比分析不同深松深度、不同工作速度下深松鏟工作阻力及松土效果的仿真結果與試驗結果得出,兩者變化趨勢基本相同,由此證明用離散元法仿真分析深松鏟工作性能具有可行性。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
電子制作(2018年18期)2018-11-14 01:48:24
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中華詩詞(2018年11期)2018-03-26 06:41:34
山東工業技術(2016年15期)2016-12-01 05:31:22
