無支撐環PET瓶蓋封裝質量在線檢測方法
2018-08-03 03:14:18張萌,許敏
傳感器與微系統 2018年8期
張 萌, 許 敏
(1.遼寧裝備制造職業技術學院 機械工程系,遼寧 沈陽 110161;2.中國科學院 沈陽自動化研究所,遼寧 沈陽 110179)
0 引 言
聚對苯二甲酸乙二酯(polyethylene terephthalate,PET)瓶與防盜蓋鎖緊過程中,瓶蓋區域會出現歪蓋、高蓋、防盜環斷裂、瓶蓋表面出現液體殘留及異物等缺陷。傳統的檢測方法依靠肉眼判斷防盜蓋區域是否存在缺陷,速度慢、漏檢誤、檢率高、勞動強度大[1,2]。文獻[3]對瓶蓋區域進行分割,根據支撐環在瓶頸處突出的特性來定位支撐環,然后通過模板匹配的方法完成瓶蓋區域的缺陷檢測。文獻[4]利用邊緣檢測算法精確估計出支撐環和瓶蓋頂部的直線方程,通過兩直線的距離檢測瓶蓋區域是否存在缺陷。文獻[5]使用二值化并進行水平方向的投影,利用支撐環的定位來完成缺陷識別。文獻[6]根據PET瓶體的對稱性消除毛刺與水珠對缺陷檢測的影響,完成了PET瓶支撐環的檢測和瓶蓋缺陷分類。
本文針對無支撐環PET瓶瓶蓋的特點,采用一種基于顏色空間變換與動態閾值分割PET瓶蓋缺陷檢測方法,該方法不僅能檢測常規缺陷如無蓋、高蓋、歪蓋、防盜環完全斷裂,還能檢測防盜環與瓶蓋之間連接橋部分斷裂及瓶蓋表面異物。
1 檢測系統結構及組成
PET瓶蓋封裝質量在線系統主要由圖像采集單元、圖像處理單元、可編程邏輯控制器(programmable logic controller,PLC)控制單元、氣動執行機構等組成。其中圖像采集單元由發光二極管(light-emitting diode,LED)光源、鏡頭、電荷耦合器件(charge coupled device,CCD)相機、工控機等組成,如圖1所示。整個圖像采集單元中含有3個CCD相機,兩兩之間夾角為120°,保證瓶體不旋轉的情況下能夠獲得瓶蓋側面完整的圖像。當光電傳感器受到觸發后,由PLC控制單元觸發3個相機同時采集瓶蓋區域圖像,傳送圖像至圖像處理單元進行缺陷識別,最終將識別結果通過輸入/輸出(input/output,I/O)口傳送給PLC,由PLC控制氣動執行機構進行缺陷產品的剔除動作。

圖1 圖像采集系統示意
2 PET瓶蓋缺陷檢測
2.1 瓶蓋區域分割
所用的PET瓶瓶體為棕色,瓶蓋為白色,圖像采集系統獲取的瓶蓋圖像如圖2(a)所示,瓶蓋區域灰度值明顯高于瓶體及背景區域的灰度值,因此可以直接使用簡單閾值法分割瓶蓋區域。圖2(b)所示為使用固定閾值(100)分割獲取的瓶蓋區域二值圖像,光源在瓶體區域形成反光使得二值圖像中存在噪聲干擾,可以采用設置面積閾值的方法來提取目標區域,圖2(c)所示為通過設置面積閾值提取的無噪聲瓶蓋區域二值圖像。

圖2 瓶蓋區域閾值分割
2.2 瓶蓋區域缺陷提取及分類
對于無蓋、高蓋、歪蓋等缺陷的檢測方法,文獻[4~6]中詳細描述,不再贅述,本文將重點研究防盜環連接橋完全斷裂、部分斷裂以及瓶蓋表面異物檢測。常見的4種缺陷分別為蓋表面異物(藥液殘留)、防盜環完全斷裂、連接橋斷裂2根和連接橋斷裂3根。
2.2.1 瓶蓋表面異物檢測
瓶蓋表面異物一般表現為蓋表面存在藥液殘留。由于瓶蓋側面為曲面且表面分布有防滑條,造成蓋側表面灰度分布很不均勻,因此直接使用簡單閾值法魯棒性差、誤檢及漏檢率高。由于藥液殘留區與瓶蓋背景存在明顯的色差,因此本文將顏色空間變換引入到瓶蓋表面異物檢測中。由三原色(RGB)顏色空間到HSV顏色空間的變換模型如下
(1)
圖3(a)~圖3(c)所示為瓶蓋表面異物圖像經HSV顏色變換后的各分量圖像,對比發現S分量中藥液殘留區灰度特征十分明顯,因此,可以采用S分量來檢測瓶蓋區域藥液殘留,圖3(d)所示為直接使用固定閾值法分割獲得的瓶蓋藥液殘留區域。
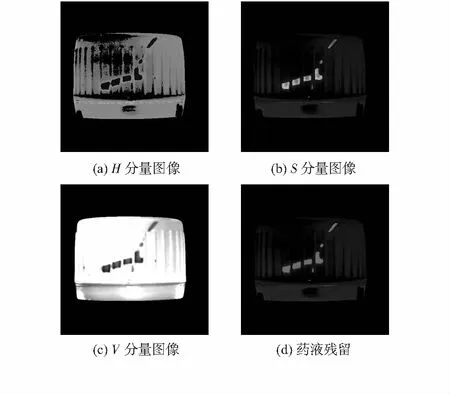
圖3 HSV顏色變換及缺陷分割
2.2.2 防盜環連接橋斷裂檢測
連接橋全部斷裂時蓋與環完全分離,其特征比較明顯,可以使用瓶蓋區域的寬高比判斷。而連接橋部分斷裂時(斷2根和斷3根),蓋與環之間的間隙很小,一般為0.2~0.3 mm,且蓋的邊緣存在凸起,造成蓋環接觸區灰度分布存在突變,使用固定閾值法很難分割出完整的缺陷區域。本文將動態閾值分割算法引入到連接環部分斷裂缺陷檢測中,首先對瓶蓋區域背景灰度值進行估計,然后將待檢圖像與背景圖像進行比較,通過設置動態閾值來分割缺陷區域。
設f(x,y)表示某一圖像,h(x,y)表示某一形式的濾波器,濾波后的灰度圖像g(x)為
g(x,y)=f(x,y)?h(x,y)
(2)
式中 ?為卷積。背景建模的關鍵是濾波器的設計,根據實驗,濾波器尺寸過小,所獲得背景區域不能很好地逼近真實背景區域,導致漏檢;濾波器尺寸過大,不僅計算量顯著增加,而且會導致誤檢。因此,設計濾波器尺寸時需要綜合考慮圖像分辨率、待識別對象的最小尺寸等因素。圖4所示為連接橋斷裂2根時,經均值濾波后的背景圖像,原圖中的灰度突變區域很好地融合到背景中。

圖4 瓶蓋背景建模
在獲得瓶蓋背景區域后,可以將待檢圖像與背景圖像進行逐像素灰度值比較,將滿足式(3)和式(4)的像素點歸集到集合S中
S={(x,y)∈R|g(x,y)-f(x,y)≥Tdiff}
(3)
S={(x,y)∈R|g(x,y)-f(x,y)≤-Tdiff}
(4)
式中R為像素點集合的定義域;Tdiff為動態閾值。式(3)用于高灰度區域的分割,式(4)用于低灰度區域的分割。對于連接環斷裂區,其一般表現為低灰度區域,因此,可以使用式(4)。圖5所示為防盜環連接橋部分斷裂的檢測結果。
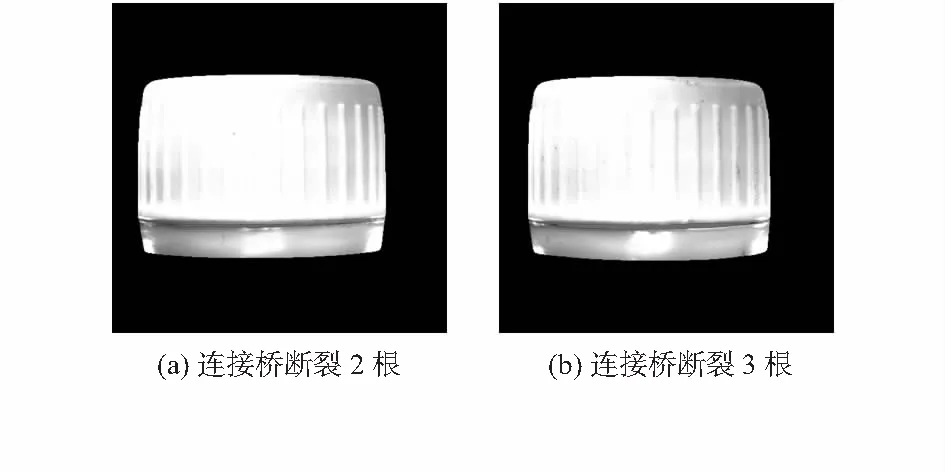
圖5 防盜環連接橋部分斷裂
3 實驗結果
檢測系統實物如圖6所示,系統主要硬件包括映美精工業相機DFK23GP031,IPC(Inter Core i5-3470,4 GB內存),千兆網卡、OPT條形與環形LED光源。軟件系統運行環境為Windows 7,軟件開發環境基于Visual C#2012,結合OpenCV圖像處理庫。表1所示為該制藥廠設定的技術指標。表2所示為實驗結果,各項檢測結果的準確率達到99 %以上,均滿足該制藥廠設定的技術指標。

圖6 檢測系統實物

檢測項目檢測精度檢出率/%正常蓋≥99.5蓋表面異物面積≥4mm2≥99.0環連接橋完全斷裂100環連接橋部分斷裂間隙≥1mm≥99.0

表2 PET瓶蓋檢測系統測試結果
4 結 論
本文提出了一種結合HSV顏色空間變換及動態閾值分割的無支撐環PET瓶蓋視覺檢測算法,解決了現有PET瓶蓋質量檢測算法過分依賴支撐環的定位,無法對瓶蓋表面異物及連接橋斷裂等缺陷進行檢測的缺點。基于該算法的視覺檢測系統已經在某制藥廠的生產線上得到了應用,各項指標均已達到了設計要求,運行狀態良好。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
當代陜西(2020年14期)2021-01-08 09:30:42
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
