改進的機床用異步電機轉子時間常數辨識方法
2018-08-09 08:30:28熊征偉
微特電機 2018年7期
關鍵詞:方法
熊征偉
(四川信息職業技術學院,廣元 628017)
0 引 言
近年來,隨著矢量控制技術的不斷發展,交流電機逐漸取代直流電機,成為各種工業應用場合的主流驅動器,如在機床驅動領域、電動汽車領域、風電領域等[1-3]。常用的交流電機包括異步電機和永磁同步電機兩類。永磁同步電機采用永磁材料構建轉子結構,因此其運行效率較高,無轉子銅耗。然而,永磁體在振動和高溫環境下易出現失磁故障,進而導致電機無法正常運行,使其可靠性較低[4-6]。與永磁同步電機相比,異步電機因結構簡單、成本低、可靠性高等優點,在機床等領域得到了更多的應用[7]。
異步電機的矢量控制包含直接轉子磁場定向控制和間接轉子定向控制等兩類。間接轉子磁場定向控制因實現簡單、可靠性高等優點而得到廣泛應用。然而,轉子時間常數偏差易導致異步電機出現磁場定向偏差,進而導致異步電機的轉矩控制精度下降,從而影響其實際控制精度[8]。為此,諸多文獻研究了異步電機的轉子時間常數辨識方法,如基于q軸磁鏈的轉子時間常數辨識方法[9],基于轉矩的轉子時間常數辨識方法[10],基于無功功率的轉子時間常數辨識方法[11],基于轉子磁鏈和定子電流點乘的轉子時間常數辨識方法[12]等。其中,文獻[12]設計的基于轉子磁鏈和定子電流點乘的異步電機轉子時間常數辨識方法因不需要采樣電機的端電壓,且克服了死區影響而得到廣泛關注。然而,該方法需要進行定轉子磁鏈觀測,而定轉子磁鏈觀測是異步電機控制的又一技術難點。
由于純積分運算存在受積分初始值和直流偏置影響的問題,國內外諸多學者研究了改進的異步電機定子磁鏈觀測方法。文獻[13]提出了3種積分運算的改進方法,獲得了較好的效果。文獻[14]在此基礎上提出了一種自適應截止頻率的方法,使定轉子磁鏈觀測精度得到進一步提高。然而,這2種方法均沒有考慮直流偏置的影響。
為了消除輸入直流偏置對定子磁鏈觀測的影響,提高異步電機的矢量控制精度,本文研究了一種改進的考慮輸入直流偏置影響的異步電機定子磁鏈觀測方法,并基于該方法和文獻[12]實現了異步電機的轉子時間常數在線辨識,從而提高了異步電機的矢量控制精度。仿真和實驗結果驗證了理論分析的正確性。
1 常規的轉子時間常數辨識方法
現有的異步電機轉子時間常數在線辨識方法常采用模型參考自適應理論進行設計[15]。文獻[11]所設計的基于無功功率的異步電機轉子時間常數辨識方法采用式(1)作為參考模型,采用式(2)作為可調模型,進而根據模型參考自適應理論設計轉子時間常數辨識方法。

文獻[11]的研究表明,該方法可以獲得較好的轉子時間常數辨識結果,然而該方法需要采樣電機的端電壓,這增加了系統的安裝和維護成本。如果直接采用矢量控制系統的調制信號重構電機的端電壓,則會受死區的影響。為此,文獻[12]進一步提出了一種改進的基于轉子磁鏈和定子電流點乘的異步電機轉子時間常數辨識方法。其分析結果表明,該方法可以采用調制信號重構電機的端電壓,且不受死區的影響,因此其辨識精度更好。式(3)為該方法中的參考模型,式(4)為該方法中的可調模型。
is·ψr=isαψrα+isβψrβ(4)
式中:ψr為異步電機的轉子磁鏈矢量;ψrα和ψrβ為異步電機轉子磁鏈的兩個分量。
由式(3)、式(4)可見,為了采用文獻[12]的方法進行轉子時間常數辨識,就必須先準確辨識異步電機的轉子磁鏈。異步電機的轉子磁鏈滿足如下關系:
定子磁鏈滿足:
式中:Rs為異步電機的定子電阻。
由此可見,異步電機的轉子磁鏈觀測問題可轉化為異步電機定子磁鏈的觀測問題。文獻[12]指出可采用文獻[16]所提的方法進行定子磁鏈觀測,進而實現轉子時間常數的辨識。然而,文獻[16]所設計的定子磁鏈觀測器未考慮直流偏置的影響。
2 改進的定子磁鏈觀測方法
文獻[13,14,16]研究了改進的異步電機定子磁鏈觀測方法。然而這些方法未考慮輸入直流偏置的影響。為此,本文研究了一種改進的異步電機定子磁鏈觀測方法。
首先,當不考慮輸入直流偏量時,由式(6)可知,在穩態下,定子磁鏈和反電動勢滿足如下關系:
es=jωeψs(7)
當考慮輸入的電壓和電流含有直流偏量時,式(6)可表示:

結合式(6)和式(8)可得:
由式(9)可見,當輸入電壓和電流信號含有直流偏量時,必然會導致觀測的定子磁鏈也含有直流偏量。如果不考慮直流偏量,定子磁鏈的觀測精度將大大降低。如果將該定子磁鏈觀測值用于文獻[12]進行轉子時間常數辨識,其辨識精度也將很低。
由式(7)~式(9)可見,當不考慮直流偏量時,式(7)成立;當考慮直流偏量時,式(7)不成立。因此,可根據式(7)設計閉環調節系統,以消除直流偏量的影響,由此可得如圖1所示的定子磁鏈觀測器。

圖1 考慮偏置補償的定子磁鏈觀測器
該方法引入了比例積分(PI)控制器,可以通過閉環調節,消除直流偏量的影響,從而提高定子磁鏈的觀測精度。
然而,圖1的定子磁鏈觀測器存在2個積分,一個為定子磁鏈觀測所需的積分,另一個為PI調節器的積分,為此,可將兩者合并,從而進一步簡化所提出的定子磁鏈觀測器。通過將圖1中的2個積分器進行結合,可得如圖2所示的定子磁鏈觀測器。
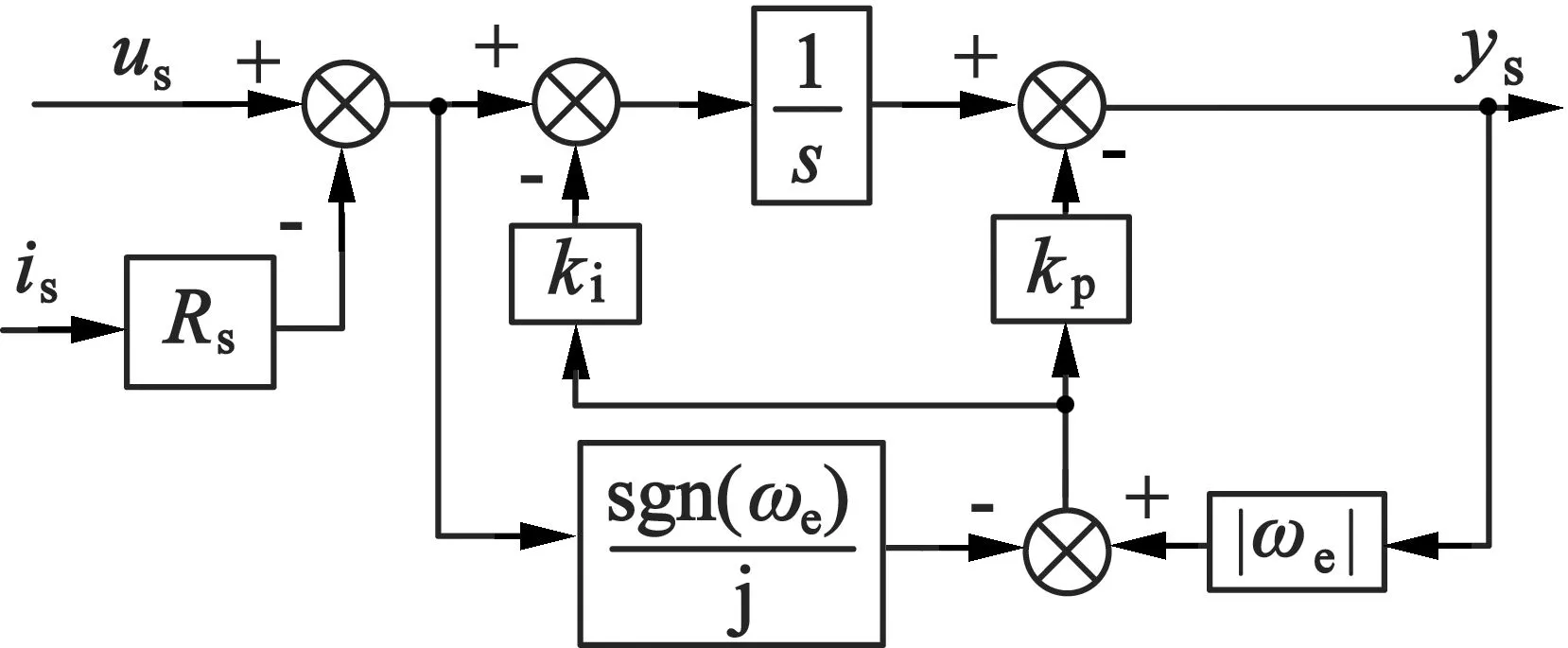
圖2 改進的定子磁鏈觀測器
根據圖2,可得改進的定子磁鏈觀測器的閉環傳遞函數,如下:
式中:kp和ki為PI調節器的比例系數和積分系數。
穩態時,可認為s=jωe,此時式(10)可化簡:
由此可見,穩態時圖2的改進定子磁鏈觀測器完全可以實現定子磁鏈觀測。
同時,根據式(10)可得在靜止坐標系下的異步電機改進型定子磁鏈觀測器的實現框圖,如圖3所示。

圖3 改進的定子磁鏈觀測器的實現框圖
3 觀測器參數分析與設計
由上述分析可見,所設計的定子磁鏈觀測器需要設計比例系數kp和積分系數ki,以下從定子磁鏈觀測器的高頻諧波抑制能力和系統動態響應速度兩方面進行參數設計。
首先,當kp和ki均為零時,式(10)可簡化:
由此可見,當不加閉環調節時,所設計的定子磁鏈觀測器等同于常規的純積分運算,它對直流偏量沒有抑制能力。
以下分別取不同的kp,ki和ωe分析所設計的定子磁鏈觀測器所具有的特性。
取ωe=314 rad/s,ki=1,kp分別取0,0.001,0.1,由式(10)可得G(s)的波特圖,如圖4所示。

圖4 kp變化時傳遞函數G(s)的波特圖
由圖4可見,kp變化對所設計的定子磁鏈觀測器的高頻特性影響較大。當kp為0.001時,所設計的定子磁鏈觀測器對高頻噪聲的抑制能力明顯減弱;而當kp進一步增大為0.1時,所設計的定子磁鏈觀測器對高頻噪聲的抑制能力進一步減弱。在實際控制系統中,采樣電路必然會引入高頻噪聲,而這些高頻噪聲會降低定子磁鏈的觀測精度,因此必須進行抑制。由圖3也可以看到,輸入信號噪聲會直接通過kp引入到輸出端,因此對輸出的定子磁鏈影響較大。為此,本文選擇kp=0,以提高所設計的定子磁鏈觀測器對高頻噪聲的抑制能力。
當kp=0時,式(10)進一步簡化:
此時,取ωe=314 rad/s,分別取ki=1,10,100,可得此時G(s)的波特圖,如圖5所示。
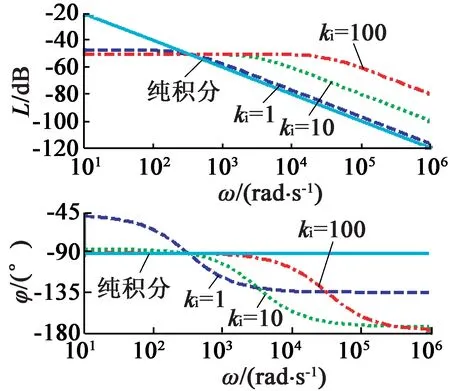
圖5 ki變化時傳遞函數G(s)的波特圖
同時,取ki=1,ωe分別取31.4,314,628 rad/s,可得此時G(s)的波特圖,如圖6所示。
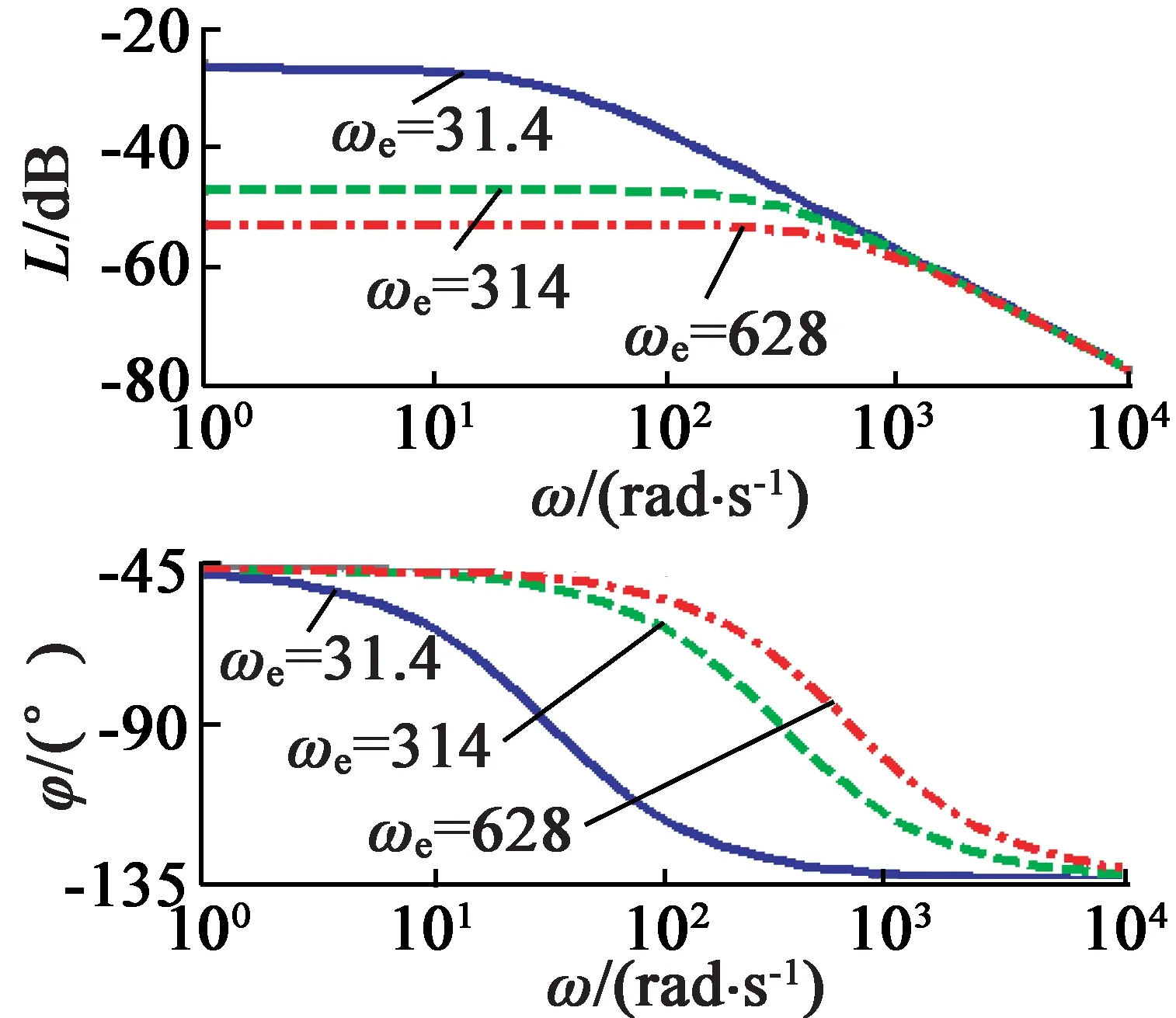
圖6 ωe變化時傳遞函數G(s)的波特圖
由圖5可見,隨著積分系數的增大,所設計的定子磁鏈觀測器的動態響應速度會增大,但其對高頻噪聲的抑制能力也會隨之降低。由圖6可見,隨著電機運行頻率的增大,所設計的定子磁鏈觀測器對直流偏量的抑制能力也逐漸增大。
考慮到電機的運行頻率較寬,綜合考慮所設計的定子磁鏈觀測器對高頻噪聲、直流分量的抑制能力,以及動態響應速度,本文研究了一種隨電機運行頻率自適應的積分系數設計方法,如式(14)所示。
式中:ωc為截止頻率,一般選擇為電機額定頻率的5%~20%;C為臨界積分系數,典型值為1~10。由此可得比例系數kp和積分系數ki的具體設計方法。
4 仿真研究
為了驗證所設計的定子磁鏈觀測器的有效性,本文建立了異步電機的矢量控制系統,并通過MATLAB/Simulink仿真軟件建立所設計的定子磁鏈觀測器,并進行仿真驗證。此外,本文還將所設計的定子磁鏈觀測器用于文獻[12]所設計的轉子時間常數在線辨識方法中,從而實現了異步電機轉子時間常數的在線辨識,并提高了辨識精度。
本文所設計的機床用異步電機基于改進型定子磁鏈觀測器的轉子時間常數辨識方法的整體控制框圖如圖7所示。
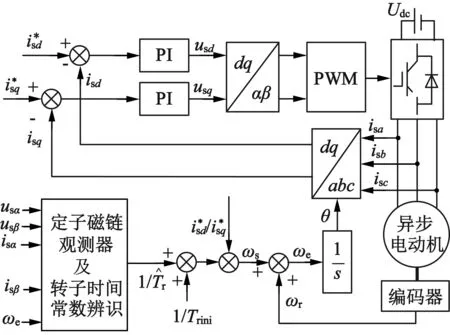
圖7 加入改進型定子磁鏈觀測器的整體控制框圖
異步電機參數:額定功率Pn為7 kW,額定電壓Un為220 V,額定頻率fn為50 Hz,額定電流in為18 A,定子電阻Rs為1.26,轉子電阻Rr為0.2,定子電感Ls和轉子電感Lr為0.054 7 H,互感Lm為0.05 H,漏感L1r為0.004 7 H,極對數p為2,額定勵磁電流id為8 A。

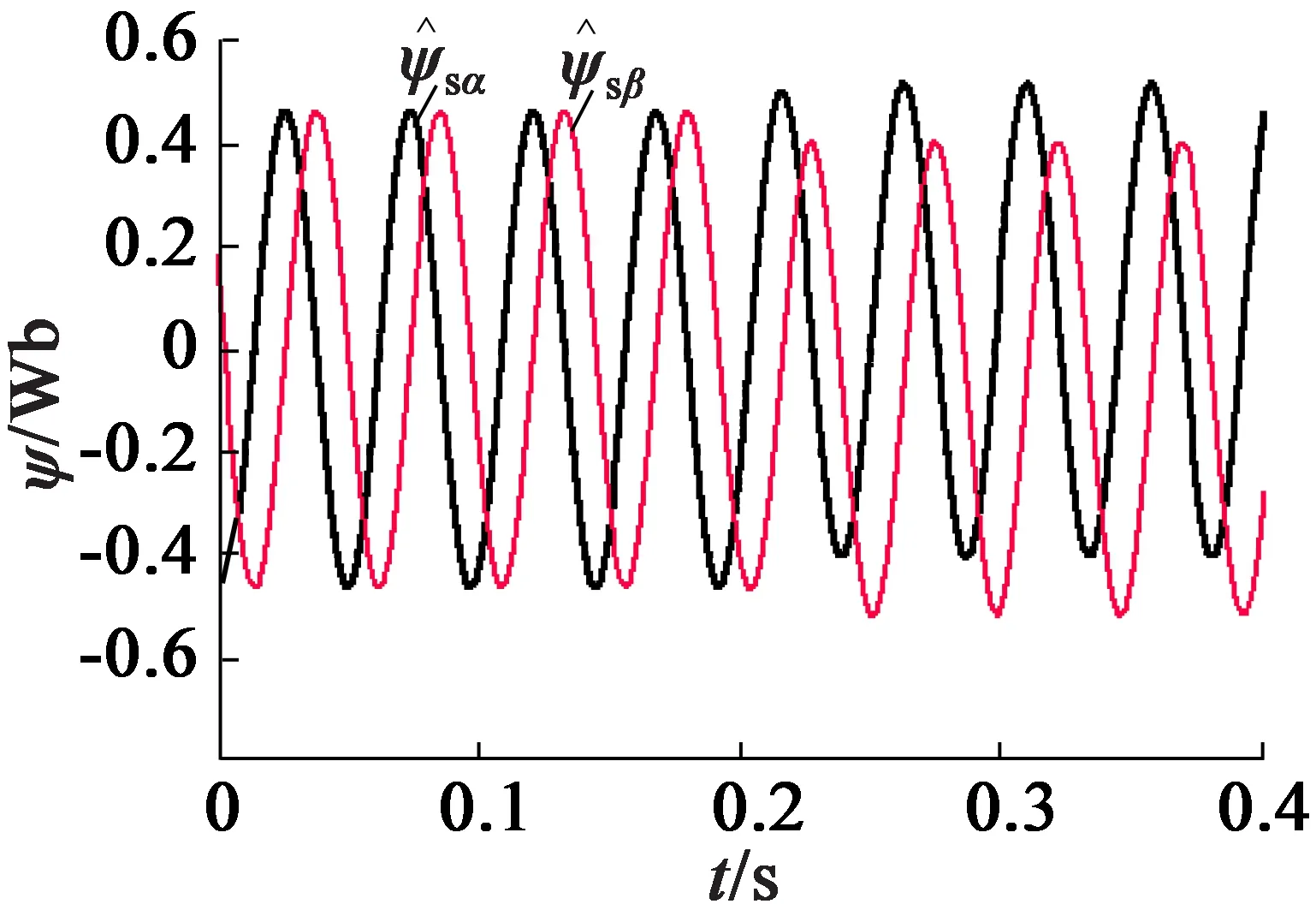
圖8 常規定子磁鏈觀測結果
由圖8可見,當不考慮直流偏量抑制時,由于積分器的作用,定子磁鏈觀測器輸入的直流偏量直接導致觀測的定子磁鏈含有直流分量,從而降低了定子磁鏈的觀測精度。如果將該定子磁鏈觀測結果用于轉子時間常數辨識,也必將導致估計的轉子時間常數存在較大的偏差。
圖9給出了同樣條件下本文所提出的考慮直流偏量抑制時的定子磁鏈觀測結果。由圖9可見,當在0.2 s施加直流偏量時,由所設計的定子磁鏈觀測器得到的定子磁鏈經過一個短暫的暫態過程之后恢復穩定,與圖8相比,本文的定子磁鏈觀測器所觀測的定子磁鏈在穩態時不含直流偏量,其觀測精度更高,因此更適合應用于轉子時間常數辨識。
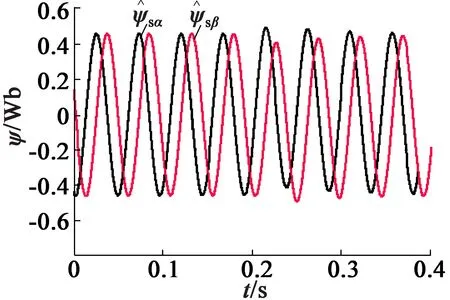
圖9 所提出的定子磁鏈觀測結果
然后,由式(5)可知,當定子磁鏈得到準確觀測時,通過簡單的數學運算就可以得到轉子磁鏈值。此時,即可采用文獻[12]所設計的方法進行異步電機的轉子時間常數在線辨識了。文獻[12]所設計的轉子時間常數辨識算法的控制框圖如圖10所示。
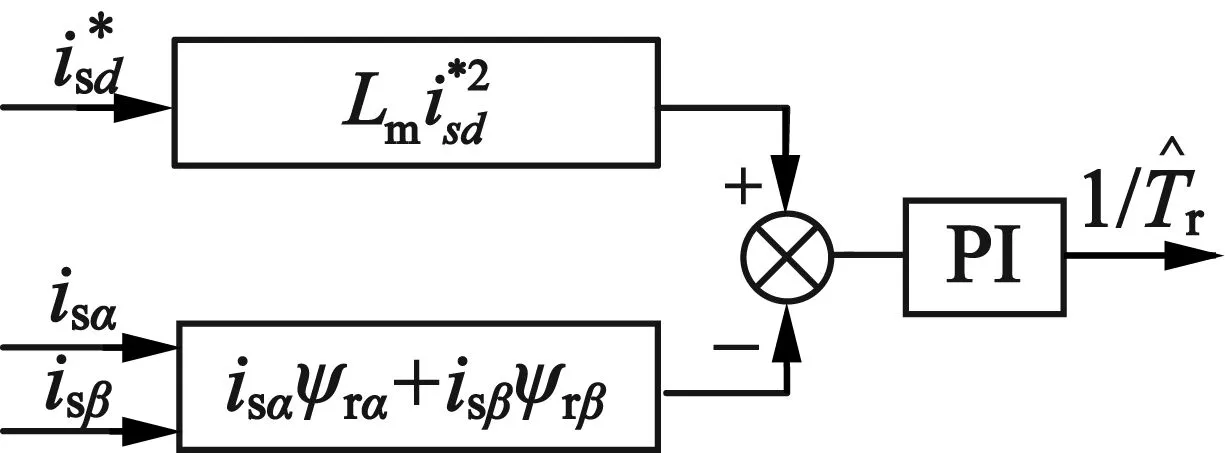
圖10 轉子時間常數辨識結果
以下具體研究基于本文所提定子磁鏈觀測器的異步電機轉子時間常數辨識方法。在該方法中,采用本文的方法進行定子磁鏈觀測,然后再根據式(5)計算轉子磁鏈,最后根據圖10實現轉子時間常數辨識,并根據圖7的控制框圖實現矢量控制。

(a) 轉子時間常數
(b) 轉矩電流
(c) 勵磁電流
由圖11可見,在轉子時間常數存在較大偏差時,采用本文所提出的轉子時間常數辨識方法可以快速準確地辨識得到轉子時間常數。與此同時,電機的轉矩電流和勵磁電流也可以得到準確的控制,其暫態響應過程良好。
圖12給出了同樣條件下轉子時間常數初始值Trini為1.367 5 s-1時的轉子時間常數辨識結果。在仿真中,仍然在0.8 s起動轉子時間常數辨識方法。
由圖12也可以看到,雖然轉子時間常數的初始值為實際值的5倍,但起動轉子時間常數辨識方法后,估計的轉子時間常數較快地收斂到實際值,且轉矩電流和勵磁電流也得到穩定控制。這也驗證了本文的基于改進型定子磁鏈觀測器的異步電機轉子時間常數辨識方法的有效性。
(a) 轉子時間常數

(b) 轉矩電流
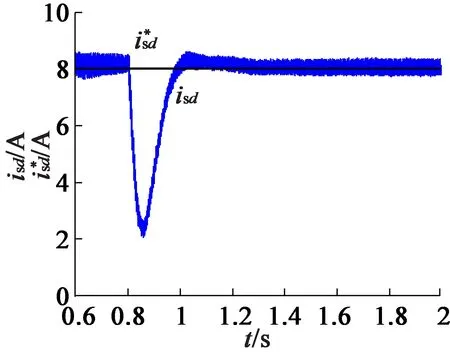
(c) 勵磁電流
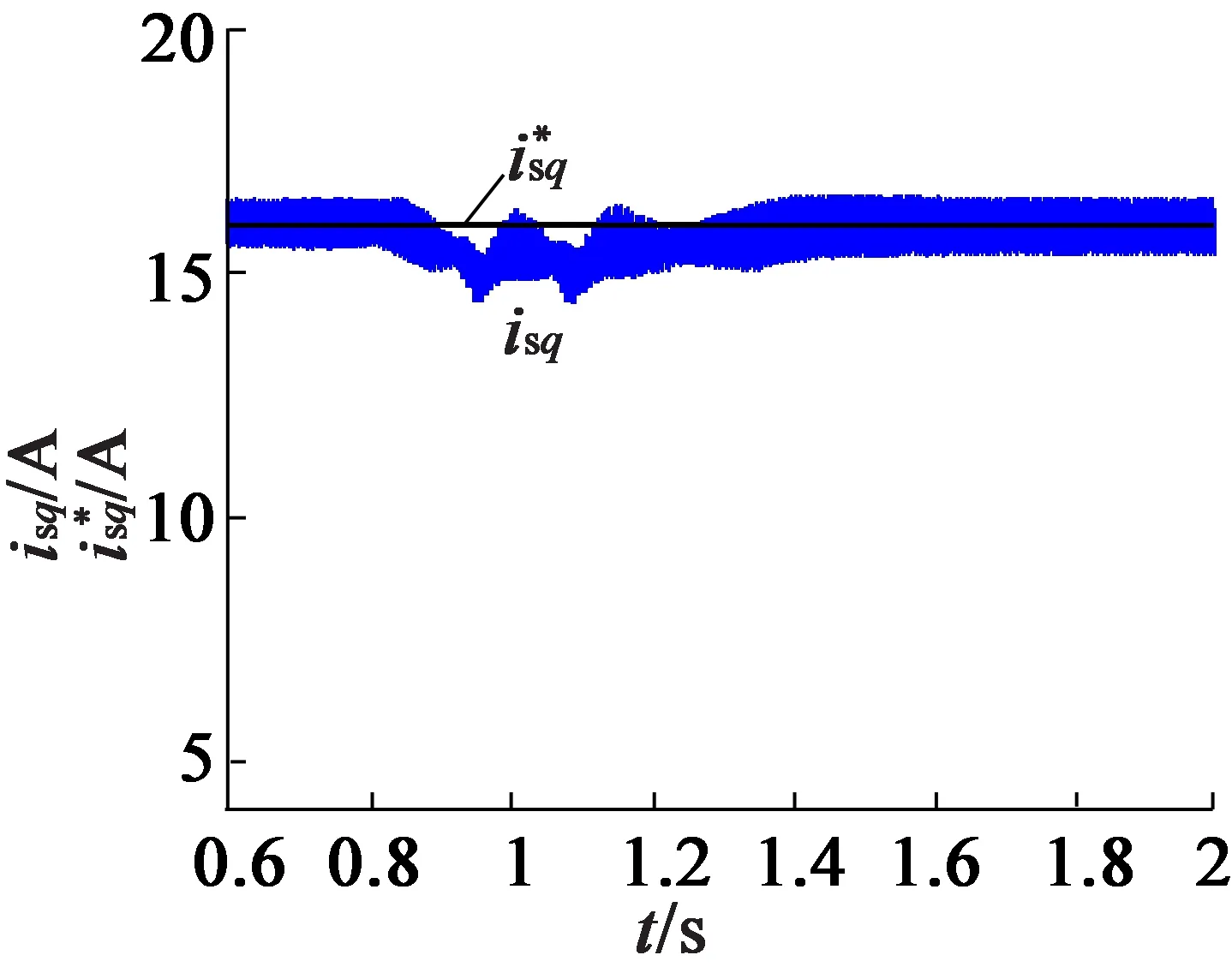
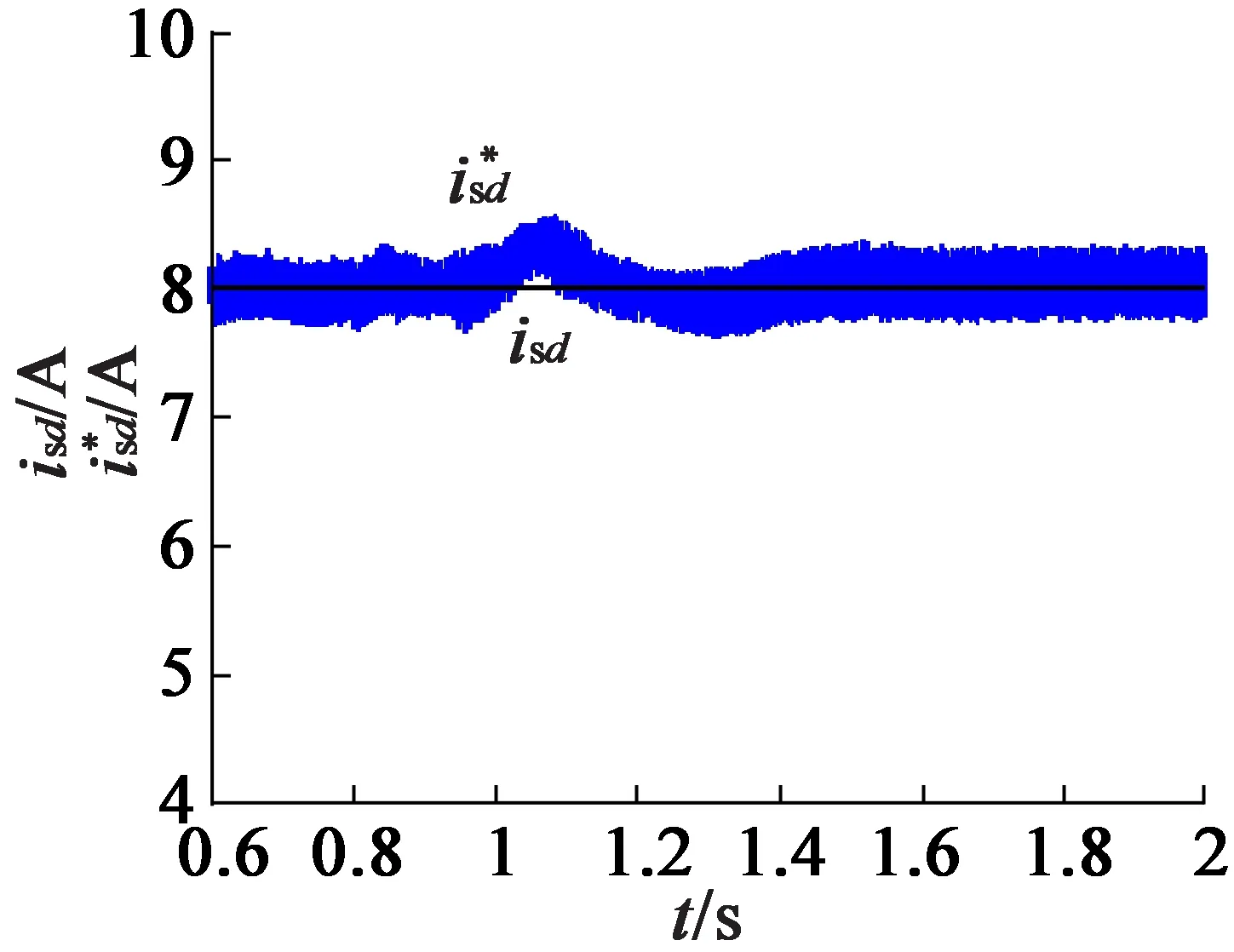
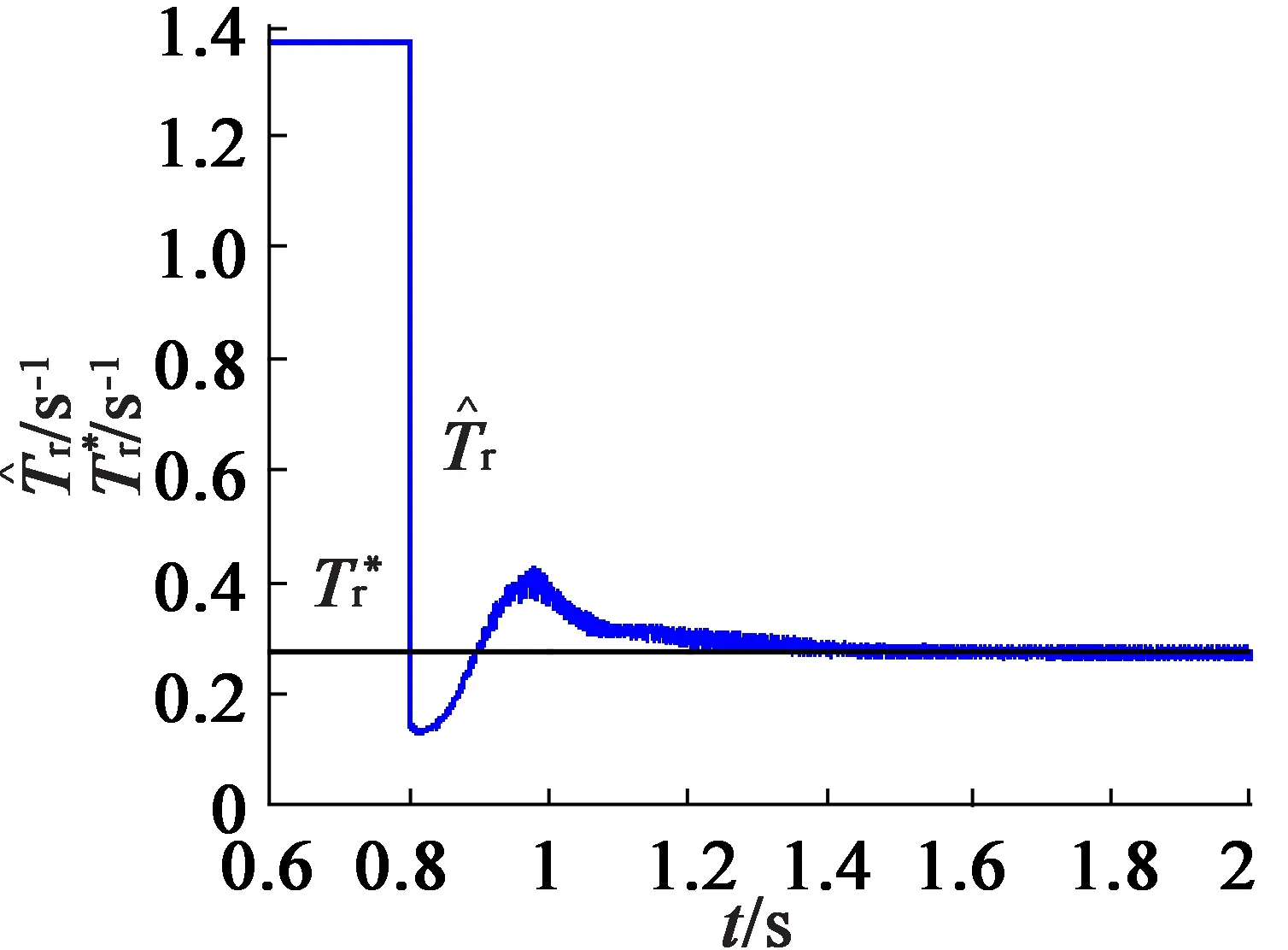
圖13進一步給出了穩態運行時轉矩電流突然由16 A突減為8 A時的仿真結果。在仿真中,轉子時間常數的初始值與實際值相同,仍在0.8 s時起動辨識算法,1 s時轉矩電流由16 A突減為8 A。
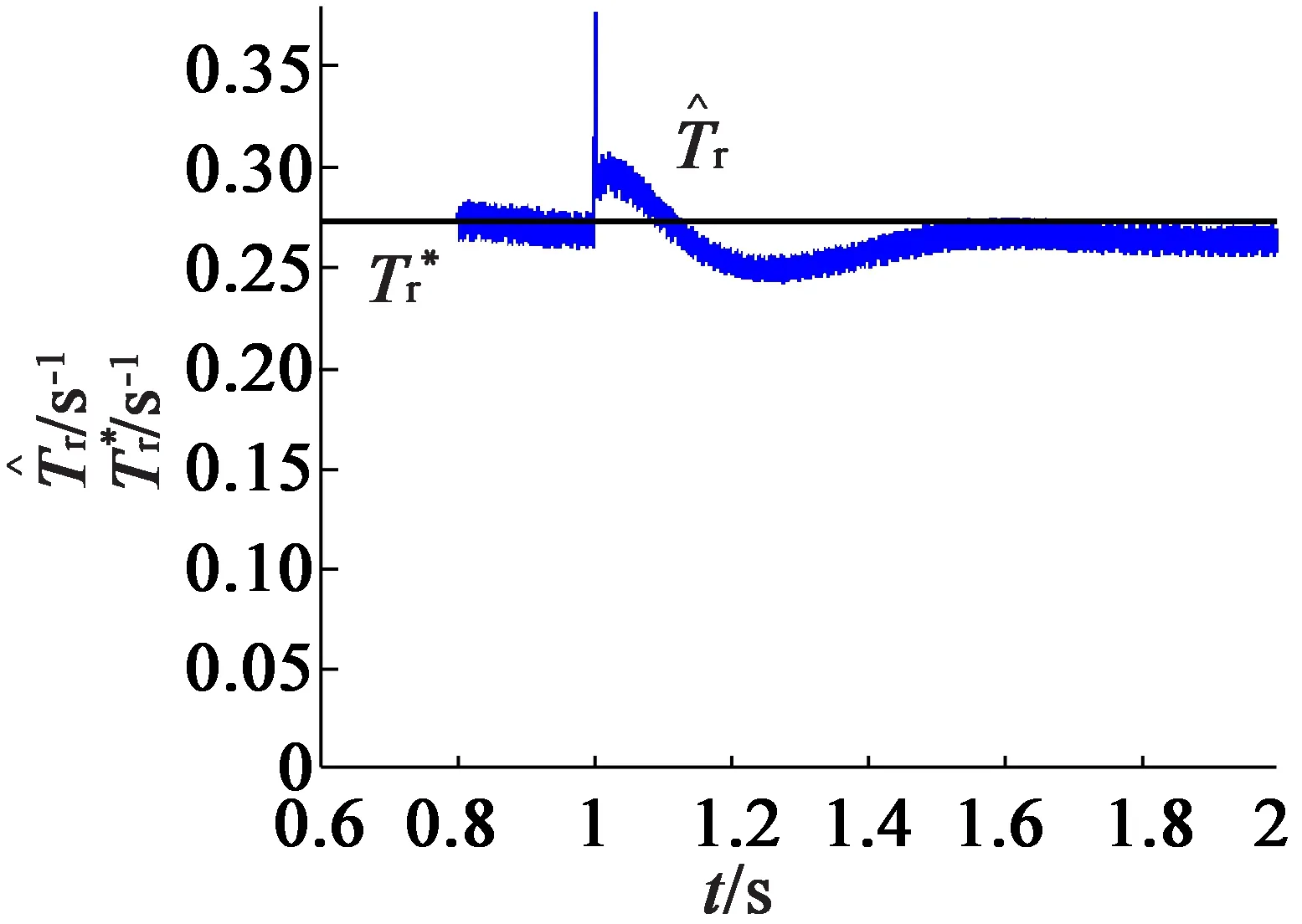
(a) 轉子時間常數
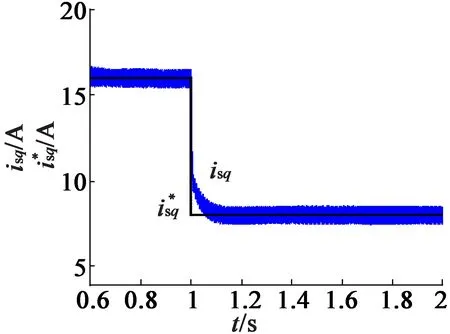
(b) 轉矩電流
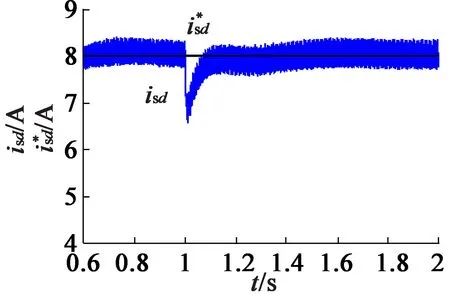
(c) 勵磁電流
由圖13可見,在電流動態變化過程中,所提出的轉子時間常數辨識方法仍然具有較好的動態響應過程,這進一步驗證了本文所提方法的有效性。
5 實驗研究
為了驗證本文所提轉子時間常數在線辨識方法的有效性,本文進一步進行了實驗研究。實驗平臺采用DSP2812作為主控制器,所使用的電機參數與仿真一致,直流側電壓設為600 V,轉矩電流為16 A,勵磁電流為8 A。
圖14為本文所建立的實驗平臺。
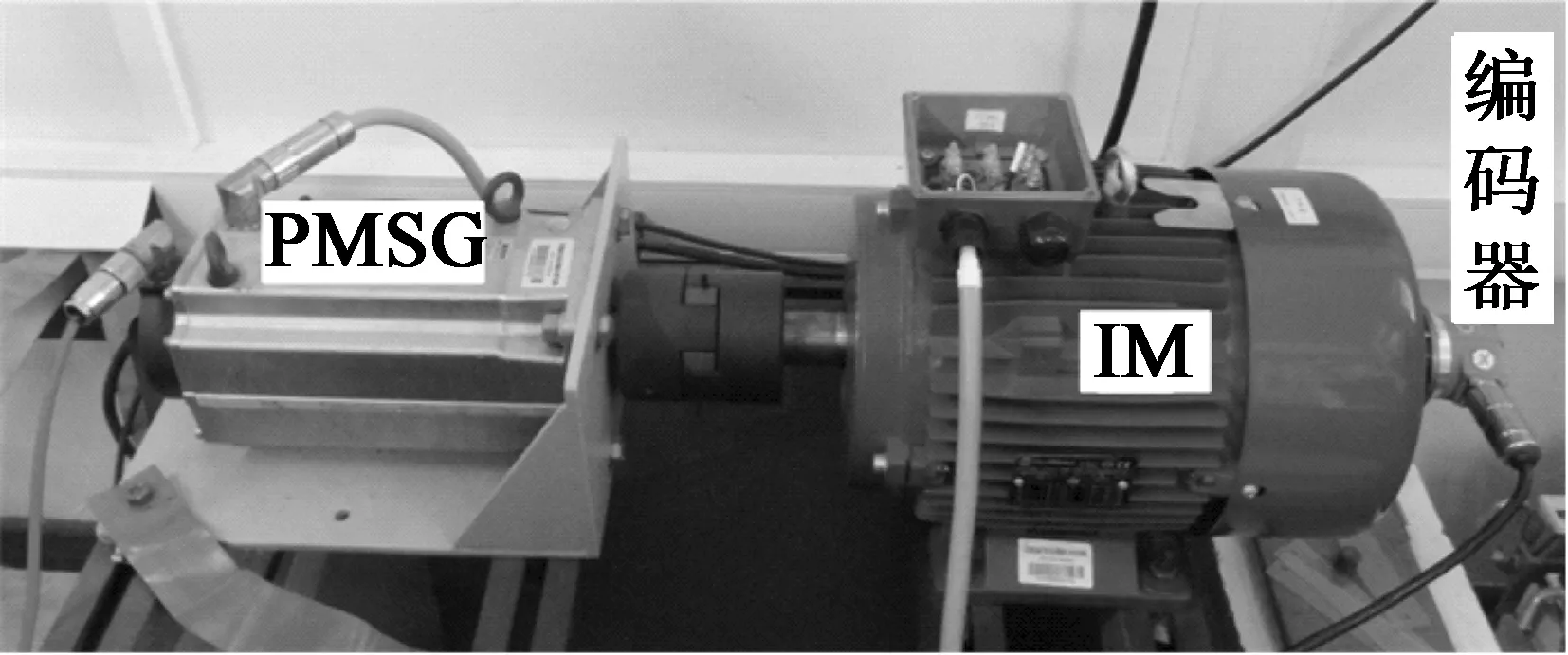
圖14 實驗平臺
圖15給出了電機轉速為62.8 rad/s時的實驗結果。在實驗中,轉子時間常數初始值Trini設置為0.054 7 s-1。由圖15可見,在起動辨識算法之后,估計的轉子時間常數都能較快收斂到真實值,驗證了該方法的有效性。

圖15 Trini設置為0.054 7 s-1時的實驗結果
6 結 語
本文設計了一種機床用異步電機的改進型定子磁鏈觀測器,并用該定子磁鏈觀測器計算得到了轉子磁鏈,設計了基于轉子磁鏈和定子電流點乘的異步電機轉子時間常數在線辨識方法。最后,建立了仿真和實驗系統,進行了詳細的仿真實驗研究。仿真與實驗結果表明,該方法可以快速準確地實現異步電機轉子時間常數的在線辨識,因此可應用于機床驅動等場合,以提高異步電機的矢量控制精度。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
