基于改進型擾動觀測器的IPMSM無傳感器控制
2018-08-09 08:30:38楊振強王繼超
微特電機 2018年7期
關鍵詞:模型
周 靜,楊振強,王繼超
(1.大連理工大學,大連 116024;2.中國人民解放軍31696部隊,錦州 121017)
0 引 言
無位置傳感器技術,可以通過建立合理的數學模型,替代傳統的機械式編碼器,獲得電機的位置信息。由于此技術能降低系統成本,減小電機體積,降低運行環境要求,因此具有較高的研究價值[1-3]。
對比表貼式永磁同步電機(以下簡稱SPMSM),內置式永磁同步電機(以下簡稱IPMSM)是嵌入式轉子結構,具有可靠性強、調速范圍大、效率高等優點,是目前發展的主流[4-6]。但是,IPMSM存在凸極效應,磁路非線性,電機數學模型相對復雜,在無位置傳感器技術中,用于轉子位置信息估計的觀測器設計與調試過程相對復雜,不易于工程實現[7,8],本文致力于解決此類問題。
近年來,隨著科研工作者對無位置傳感器技術研究的深入,取得了大量的研究成果。文獻[9]提出了一種基于合成反電動勢的滑模狀態觀測器,實現了IPMSM無位置傳感器控制系統的高速穩態運行,但是在開關切換時容易引入高頻信號,需要通過兩級濾波器對其進行消除,調試起來復雜。文獻[10]基于非線性觀測器實現了IPMSM無位置傳感器控制,轉子位置與轉速估算精度高,缺點是設計過程復雜、計算量大,且計算過程中需要借助狀態的微分,導致噪聲信號的放大,因此采用了低通濾波器,調節過程較復雜。文獻[11]在一種新型的擾動觀測器的基礎上實現了SPMSM無位置傳感器控制。其設計過程簡單,結果精確,調試過程簡單,容易應用。但是,其觀測模型是基于SPMSM的電流狀態方程搭建,因此不適用于IPMSM。
本文結合多種控制策略的優點,研究了一種基于改進型擾動觀測器的IPMSM控制方法。此方法通過合成反電動勢,得到與SPMSM相似的模型,再利用中間變量轉換,在不添加濾波器的條件下求得理想的合成反電動勢,將其與鎖相環結合得到轉子位置信息。利用一個隨轉速變化的誤差補償環節,消除了因為模型誤差導致的轉子位置估算誤差。通過對仿真結果分析,此方法調試過程簡單,能夠精確地估計轉子位置信息,從而完成高性能的IPMSM無位置傳感器控制。
1 IPMSM數學模型
在靜止α,β坐標下,IPMSM的電壓方程如下:
可以將式(1)改寫為矢量形式:

可以看出,因為IPMSM 的Ld,Lq不等,半差電感不為零,附加電壓ηαβ受θe的影響,導致利用反電動勢搭建觀測器的無傳感器技術不適用于IPMSM。因而,本文通過定義合成反電動勢,使IPMSM的數學模型變成與SPMSM 相似的模型。
通過坐標變換理論,對附加電壓ηαβ變換,可得:
式中:id為直軸電流。
通過將附加電壓ηαβ分解成E1,E2,E3,由式(2)和式(3)可知,E2與反電動勢Eαβ的相位相同,可以將其合并。
定義合成反電動勢Esyn:
E3與反電動勢Eαβ正交,而且和合成反電動勢的相比,E3的幅值比較小,為了簡化計算,可以將其忽略。
定義合成后的輸入電壓矢量vαβ:
將合成后的量代入式(1),IPMSM 在α,β坐標系下的電壓方程可以變形:
從而,得到以定子電流為狀態變量的電機電流狀態方程:
2 擾動觀測器的設計
2.1 擾動觀測器的數學模型
干擾下的時域微分方程:
式中:x是狀態變量,u是輸入量,d是擾動量;A,Bu及Bd分別是與x,u及d對應的系數矩陣。
在干擾信號d變化遲緩的情況下,d的導數約等于0,可以忽略。
估計誤差:

對應的擾動觀測器可以表示:
式中:L為擾動觀測器的增益矩陣。
本文采用了文獻[11]中利用中間變量轉換的改進型擾動觀測器,代入式(10),可以得到:
定義中間變量:

從而,得到擾動觀測器的模型:
由于借助中間變量z,擾動量的估計不用計算狀態變量微分,所以不用額外設計濾波器對噪聲信號進行消除,從而簡化了觀測器。
本文將靜止α-β坐標下合成反電動勢Esyn作為擾動量,建立基于合成反電動勢的擾動觀測器模型。
對式(7)的IPMSM電流狀態方程整理可得:

從而,得到基于合成反電動勢的觀測器模型:
式中:l為擾動觀測器的增益。
根據式(15),作出的擾動觀測器結構圖如圖1虛線框所示。
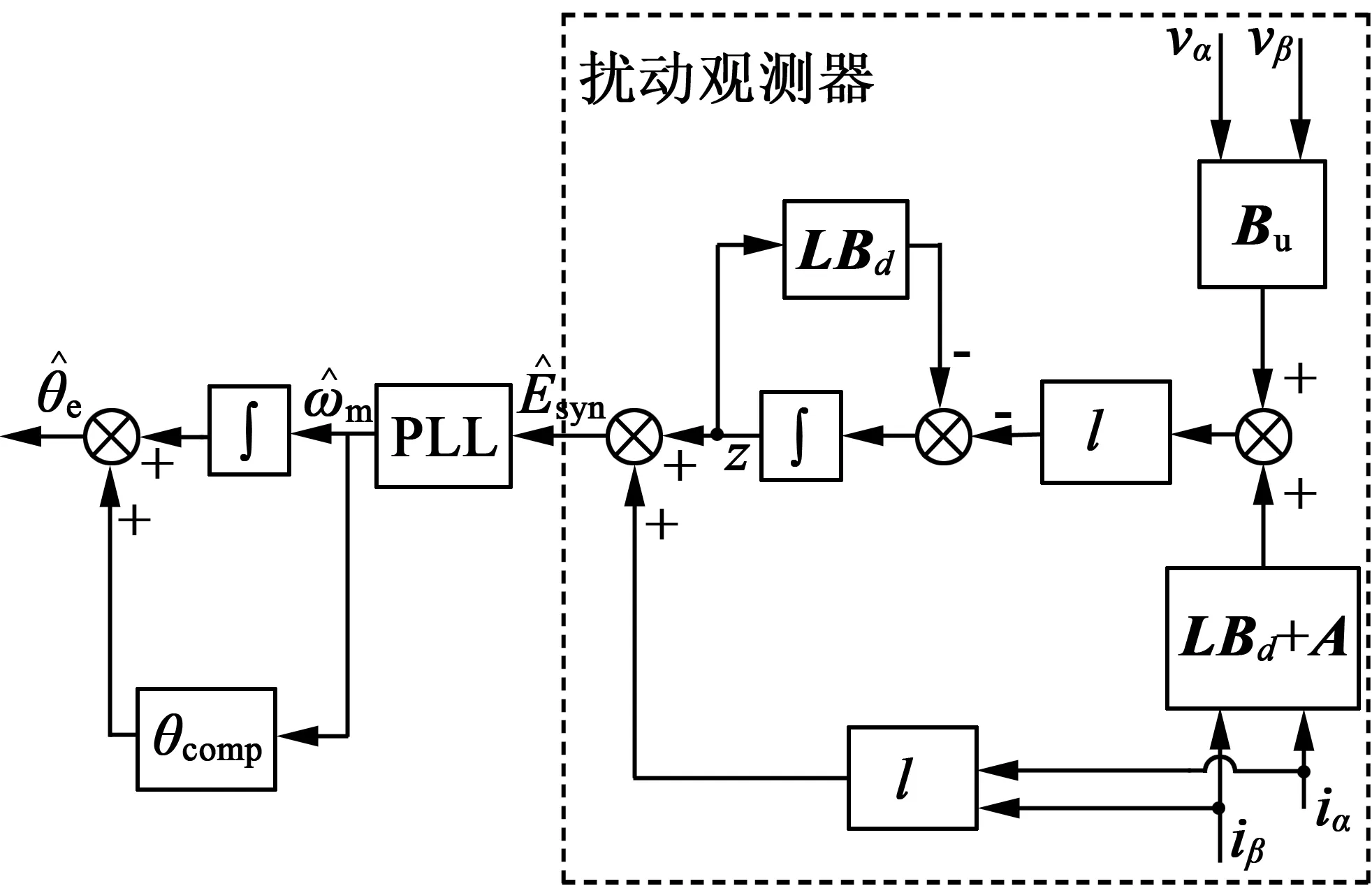
圖1 基于擾動觀測器的轉子位置估計
由圖1可知,定子電壓和電流經過改進型擾動觀測器可以估計出合成反電動勢。由于合成反電動勢中有IPMSM轉子位置和速度信息,結合PLL與對應的位置補償后可以實現對轉子位置和速度較為精確地估計[12-14]。
根據式(4)可以推出:
式中:k=pωm(ψf+2L1id)。
合成反電動勢利用PLL實現對轉子速度的估計,估計出的速度量再通過積分便能夠求得轉子位置。
2.2 轉子位置補償
為了消除因為觀測器模型誤差導致的轉子位置估算誤差,需要進行轉子位置補償。
對式(10)作拉氏變換,推導出擾動觀測器的傳遞函數:
因此,擾動觀測器可等效為一階慣性環節。
結合式(4)推出估計值:
得到轉子位置補償公式:
2.3 李雅普諾夫穩定性
擾動觀測器的動態誤差方程可以表示:
為了使速度估計誤差能夠收斂,定義式(22)李雅普諾夫函數。
對其求導:
l<0
3 仿真分析
本文采用型號為GK6080-6AC31的IPMSM,表1給出了IPMSM相關參數,圖2為IPMSM控制系統的結構框圖。
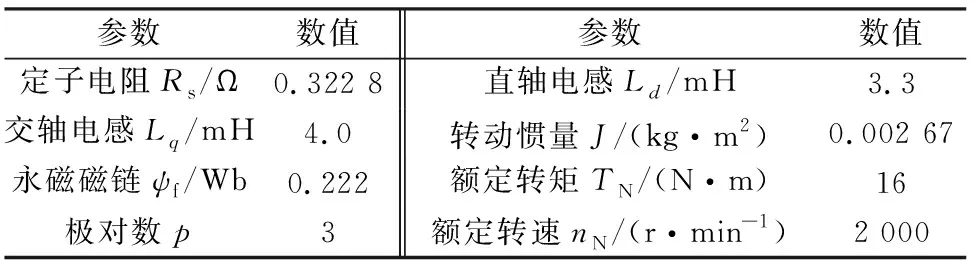
表1 IPMSM主要參數
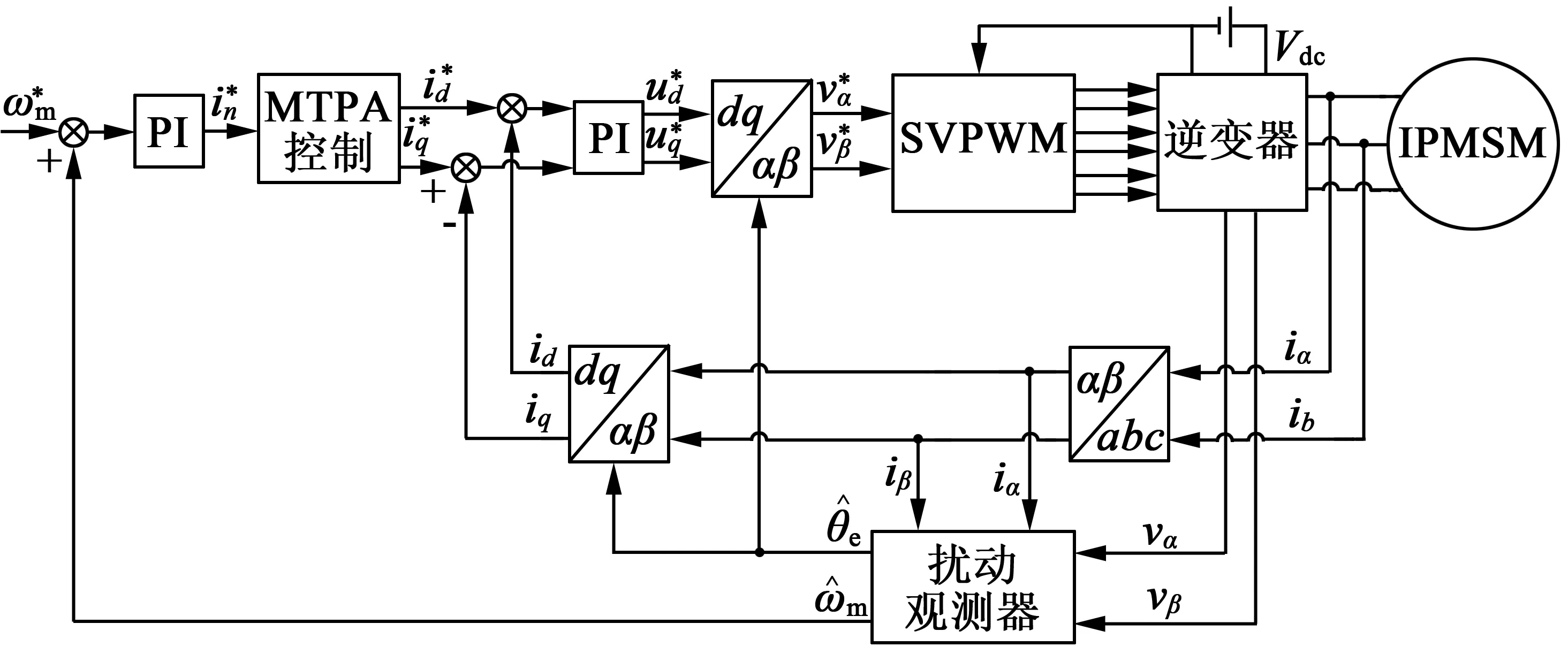
圖2 基于改進型擾動觀測器的IPMSM無位置傳感器控制系統結構框圖
在MATLAB/Simulink平臺上設計了系統的仿真模型,通過對基于改進型擾動觀測器的IPMSM無位置傳感器控制系統實行仿真,確定觀測器增益,驗證了觀測器對轉子信息的估計性能。
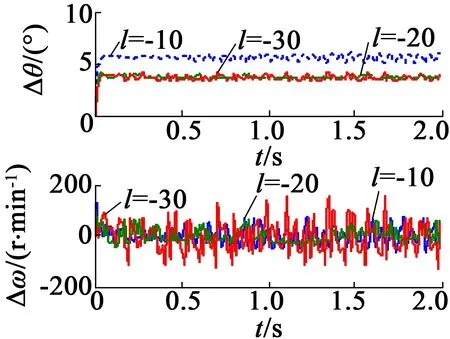
圖3 不同增益下的轉子誤差
由此可知,增益越小,轉子位置估計誤差越小,但是轉速誤差波動越大。為獲得較好的控制性能,系統選取的增益為-20。此增益選取方便,且產生的誤差在系統允許誤差范圍內,滿足系統要求。
選定增益后,討論負載變化對系統的影響。在1 s時,突加負載轉矩TL,TL的值分別取2 N·m,5 N·m,10 N·m。圖4是負載變化對轉速和位置誤差的影響。由圖4(a)可知,TL越大,轉子速度下降的幅度越多,但仍能實現對給定轉速的跟隨。由圖4(b)可知,TL越大,轉子位置誤差略有增加,轉子位置誤差最大不超過8°電角度。由此可知,觀測器具有較強的魯棒性。
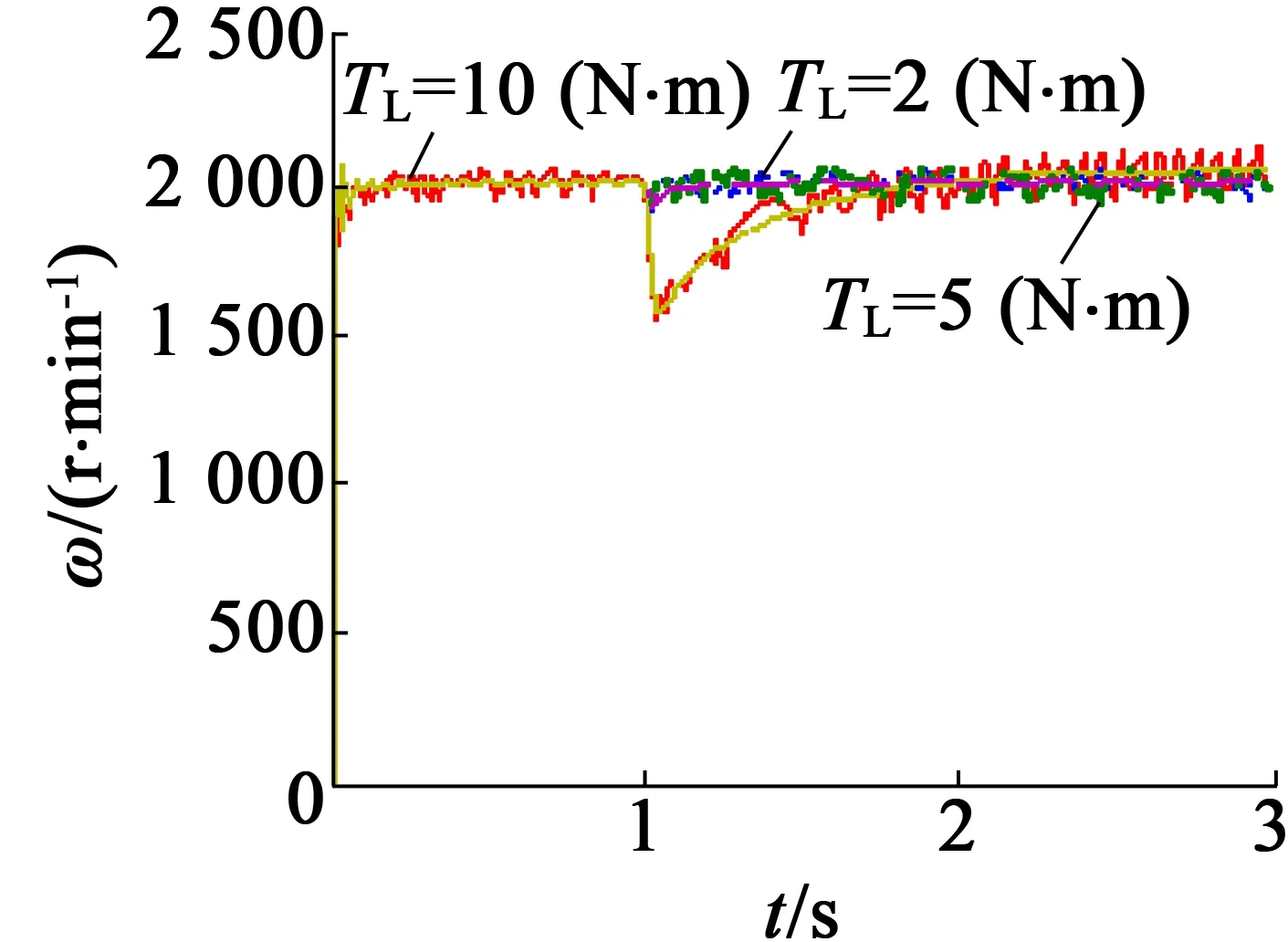
(a) 電機轉速
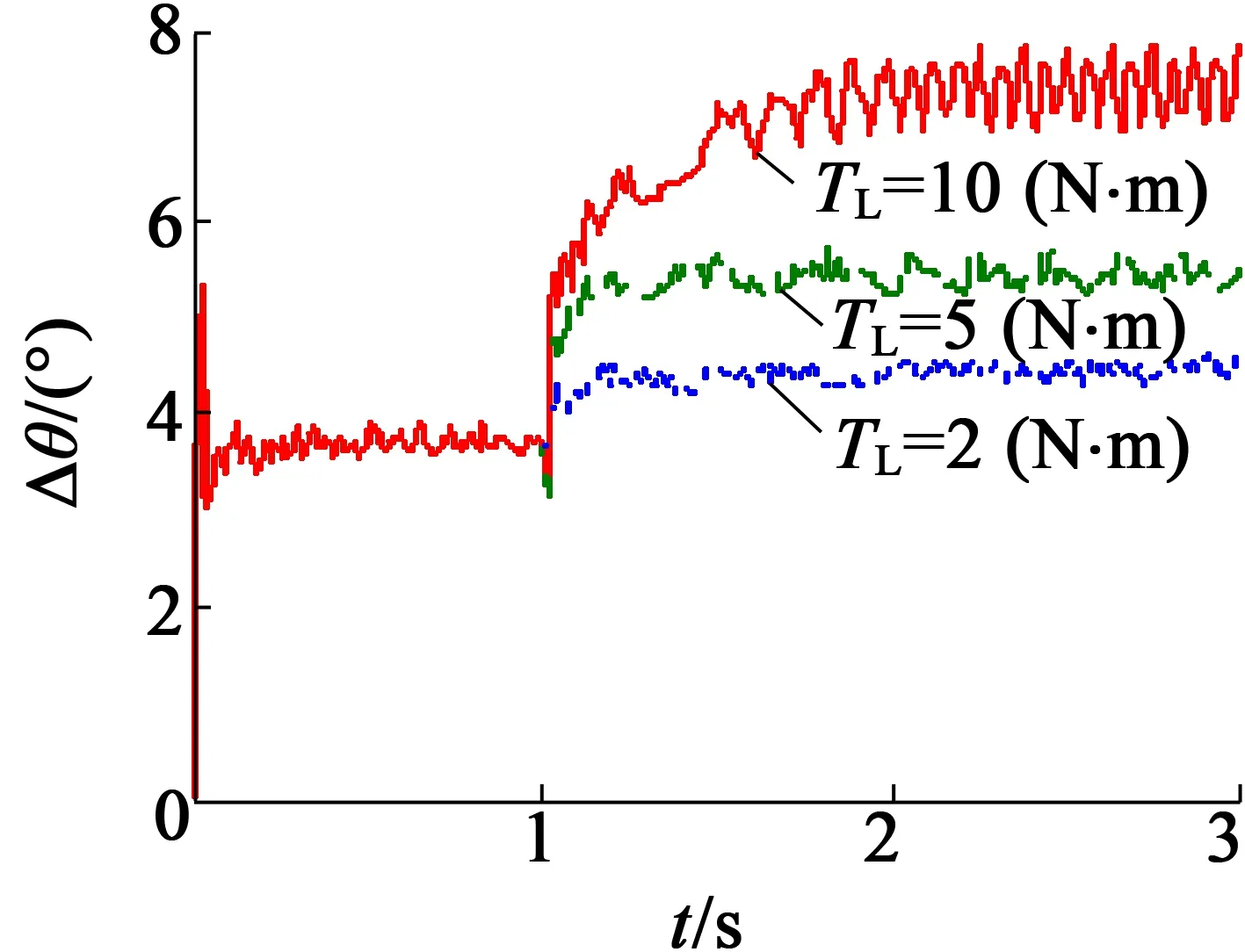
(b) 電機位置誤差
系統仿真時間設為4 s,IPMSM穩態運行在TL=2 N·m條件下,在2 s時,將電機給定轉速由500 r/min階躍到2 000 r/min,系統波形如圖5所示。從圖5可以看出,估計轉速能夠對實際轉速進行良好的跟隨。在給定轉速500 r/min 的情況下,轉子的速度誤差約±15 r/min,速度誤差波動近似為3%。在給定轉速2 000 r/min 的情況下,轉子的速度誤差近似為±50 r/min,速度誤差波動約為2.5%,速度誤差波動稍微有所減小,轉子位置估計誤差近似為4.6°電角度。
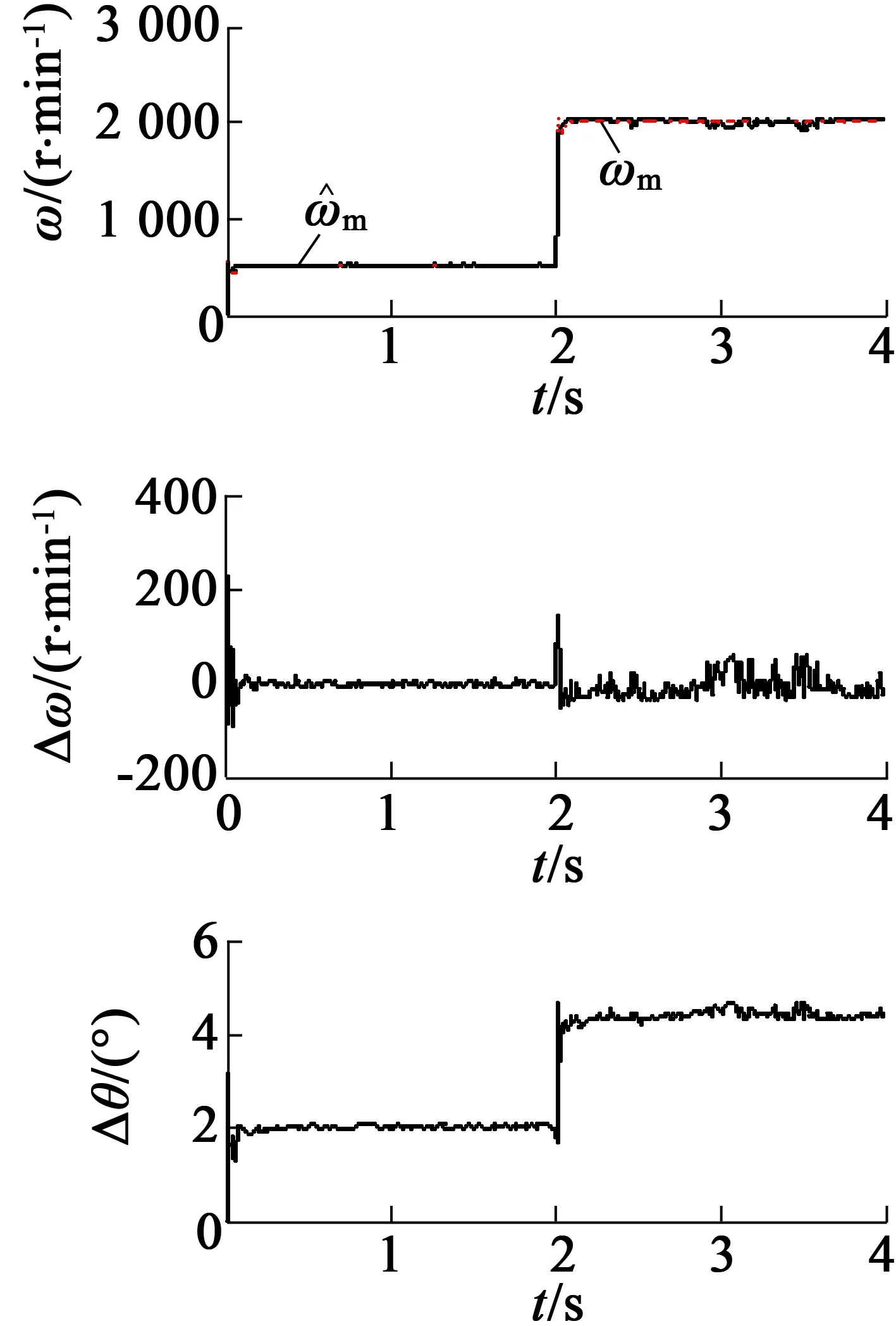
圖5 轉速階躍變化時系統波形
為了進一步驗證電機控制系統的性能,在1 s時,將IPMSM的轉子速度在200 ms內,從500 r/min斜坡上升到2 000 r/min,運行后,再用同樣的速率,降到500 r/min,系統波形如圖6所示。
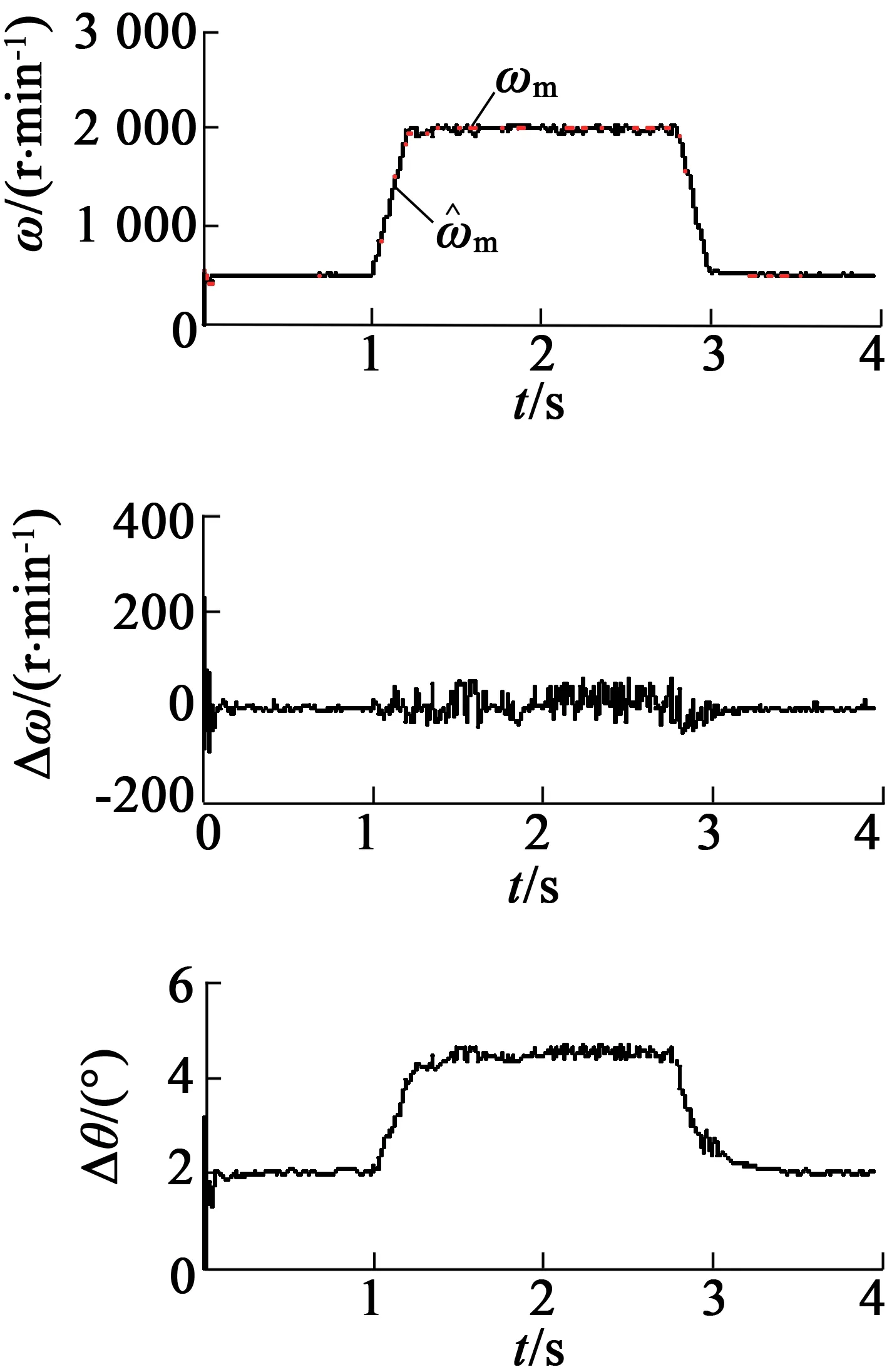
圖6 轉速斜坡變化時系統波形
從圖6可以看出,在加減速過程中,估計轉速同樣能夠對實際轉速進行良好的跟隨,轉子速度動態誤差小于50 r/min,靜態誤差小于15 r/min,始終不超過給定轉速的3%,轉子位置誤差始終不超過4.6°電角度。
對比文獻[9]和文獻[10]中的觀測器,此觀測器設計相對簡單,雖然轉速誤差波動略有增加,但是精度滿足系統要求。
綜上所述,此擾動觀測器能夠準確地估算轉子位置和轉速,實現了IPMSM高性能的運轉。
4 結 語
本文基于改進型擾動觀測器建立了IPMSM數學模型,將合成反電動勢作為擾動量,利用中間變量,結合鎖相環對轉子位置和轉速進行估算,實現了高性能的IPMSM無位置傳感器控制。通過仿真分析了不同觀測器增益和負載轉矩對轉子誤差的影響,選擇了合適的增益,完成了仿真驗證,得到以下結論:
1) 改進型的擾動觀測器利用中間變量,不用設計額外的濾波器,就可以估算出合成反電動勢,模型設計與調試過程簡單,易于工程實現,具有較高的應用價值。
2) 估算精度較高,在不同負載下具有較強的魯棒性,可以在轉速階躍與斜坡變化時實現轉子位置和轉速的準確估算,擁有較高的動態與穩態性能。
3) 不足之處,此系統基于反電動勢估計,適用于IPMSM中高速調速,所以,還需進行低速研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
