基于DSP的四舵機交流伺服系統(tǒng)控制器設(shè)計
2018-08-09 08:27:58王惠敏郝振洋
微特電機 2018年7期
關(guān)鍵詞:信號
王惠敏,郝振洋
(南京航空航天大學(xué),南京 210016)
0 引 言
現(xiàn)代戰(zhàn)爭越來越以高科技武器為主,導(dǎo)彈因其具備遠程打擊能力而成為現(xiàn)代武器中的佼佼者[1]。導(dǎo)彈通常由戰(zhàn)斗部、彈體結(jié)構(gòu)系統(tǒng)、動力系統(tǒng)、制導(dǎo)系統(tǒng)4部分組成,其中制導(dǎo)系統(tǒng)主要由探測機構(gòu)、決策機構(gòu)、執(zhí)行機構(gòu)組成。導(dǎo)彈舵機作為導(dǎo)彈制導(dǎo)系統(tǒng)的執(zhí)行機構(gòu),是導(dǎo)彈制導(dǎo)與飛行控制的重要組成部分,其性能好壞直接影響了導(dǎo)彈的飛行品質(zhì)以及制導(dǎo)精度[1]。
早期的舵機主要以液壓作動系統(tǒng)和氣壓作動系統(tǒng)為主,這些作動系統(tǒng)在結(jié)構(gòu)和動態(tài)性能上都具有明顯的優(yōu)勢,如運動平穩(wěn)、轉(zhuǎn)動慣量小、輸出力矩大、承受負載大和快速性好等,但同時存在著結(jié)構(gòu)復(fù)雜、體積質(zhì)量大、加工精度高、成本大等缺點[2]。20世紀70年代,隨著新型稀土永磁材料和專用驅(qū)動模塊的出現(xiàn),電力作動系統(tǒng)得到大力發(fā)展。20世紀90年代以來,許多高性能導(dǎo)彈采用了電動舵機結(jié)構(gòu),如美國的中距空空導(dǎo)彈AM-120、沃斯普反坦克導(dǎo)彈和戰(zhàn)斧巡航導(dǎo)彈,俄羅斯的蛙蛇R-77空空導(dǎo)彈等[1],其采用的電機都為有刷直流電機,雖然調(diào)速性能優(yōu)良,但換向器和電刷等機械接觸部件可靠性較差[3]。隨著永磁材料的快速發(fā)展,永磁無刷直流電機因其沒有換向器和電刷,消除摩擦力矩等優(yōu)點而得到廣泛使用。目前國內(nèi)電動舵機使用的驅(qū)動電機還是以有刷直流電機為主,但直流電機存在發(fā)熱高、體積大、維護不方便、控制精度不高等缺點[4]。隨著航空航天事業(yè)的發(fā)展,導(dǎo)彈對舵機系統(tǒng)提出了更多的要求,未來導(dǎo)彈舵機將朝著小型化、輕量化、高精度、高效率的方向發(fā)展[5,6]。永磁同步電機因其體積小、質(zhì)量輕、功率密度高、單機容量大、可維修性好以及價格低廉等優(yōu)點,在伺服應(yīng)用場合體現(xiàn)出越來越多的優(yōu)越性[7,8]。交流伺服系統(tǒng)大多采用數(shù)字化控制,將先進的控制理論和復(fù)雜的控制算法通過DSP實現(xiàn),進而實現(xiàn)系統(tǒng)性能的優(yōu)化[2,9,10]。
本文針對導(dǎo)彈舵機系統(tǒng)輸出力矩大、體積質(zhì)量小、精度高、效率高的要求,將永磁同步電機與直驅(qū)式滾柱絲杠結(jié)構(gòu)相結(jié)合,使舵機本體具有質(zhì)量輕、體積小、載荷比大的優(yōu)點。控制器通過優(yōu)化軟件結(jié)構(gòu)及算法,實現(xiàn)單DSP控制4臺舵機的結(jié)構(gòu),大大減小舵機控制系統(tǒng)的體積和質(zhì)量。通過實驗驗證系統(tǒng)能有效跟蹤上位機位置給定且動態(tài)性能較好。
1 舵機控制系統(tǒng)基本原理
1.1 永磁同步電機數(shù)學(xué)模型
永磁同步電機建模時,通常忽略定轉(zhuǎn)子鐵心磁阻、渦流和磁滯損耗。在同步旋轉(zhuǎn)d,q軸系下,表貼式永磁同步電機定子電壓方程:
式中:Ud,Uq為直交軸電壓;id,iq為直交軸電流;ωr為轉(zhuǎn)子角速度;R,L分別為定子電阻和電感;ψf為永磁體磁鏈。
1.2 舵機系統(tǒng)工作原理
導(dǎo)彈制導(dǎo)系統(tǒng)通過串口通信對舵機控制系統(tǒng)發(fā)出位置指令,并監(jiān)控舵面位置角度,通過位置反饋對舵機位置進行調(diào)節(jié),實現(xiàn)閉環(huán)控制[11]。舵機控制系統(tǒng)接收位置指令,當(dāng)檢測到實際位置與指定位置存在誤差Δθ時,控制器作用,產(chǎn)生誤差下所需的Ud,Uq,通過SVPWM調(diào)制,控制電機轉(zhuǎn)動從而帶動絲杠運動,使舵面偏轉(zhuǎn)角度達到指定位置。
2 系統(tǒng)硬件電路設(shè)計
系統(tǒng)由直驅(qū)式電力作動器(舵機)、控制器、功率變換器和通信部分組成。其中舵機主要構(gòu)成部分為永磁同步電機、滾珠絲杠、旋轉(zhuǎn)變壓器(以下簡稱旋變)以及位移傳感器。系統(tǒng)結(jié)構(gòu)框圖如圖1所示。
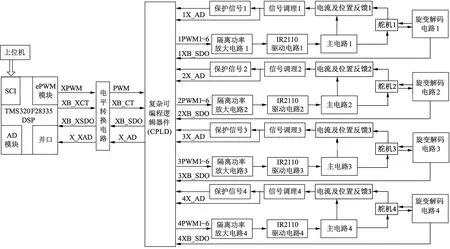
圖1 系統(tǒng)結(jié)構(gòu)框圖
2.1 DSP的選擇
DSP作為控制系統(tǒng)的核心處理器芯片,主要工作有采集系統(tǒng)的運行數(shù)據(jù),實現(xiàn)系統(tǒng)的控制算法,產(chǎn)生系統(tǒng)的控制信號等。目前面向運動控制的DSP芯片主要有美國德州儀器(TI)的TMS320C2000系列,其中以TMS320F2812和TMS320F28335最為常見。F2812芯片具有2個事件管理器(EV)模塊,適用于運動控制和電機控制等領(lǐng)域。每個EV模塊有3個全比較單元,每個比較單元可以產(chǎn)生一對互補的PWM波,3個比較單元可以產(chǎn)生6路PWM波控制一個三相全橋電路。所以一個F2812芯片最多可以同時控制2臺電機。F28335將F2812的EV模塊分為ePWM、eQEP、eCAP3個模塊并且互不干擾,易于實現(xiàn)復(fù)雜信號的輸出。其中F28335的ePWM模塊相對于F2812的EV模塊,其PWM輸出能力提高了一倍。一個F28335芯片具有6個獨立的ePWM模塊,每個ePWM模塊包括2路PWM信號,則每個芯片的ePWM模塊可以發(fā)出12路獨立的PWM波。另外,F(xiàn)28335帶浮點運算,動態(tài)范圍更大,并且F28335比F2812多了MAC單元,運算速度提高一倍。總體而言,F(xiàn)28335相對于同時鐘頻率下的F2812芯片執(zhí)行效率提高一倍。2種芯片主要功能對比如表1所示 。
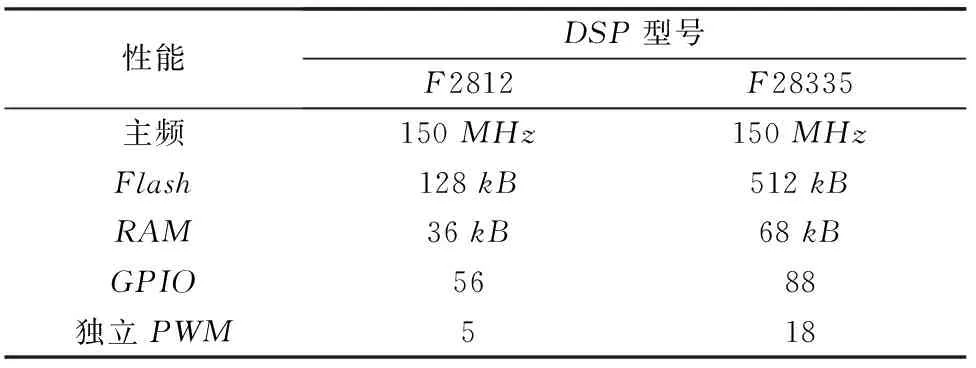
表1 2種DSP性能對比
28335屬于Delfino系列中的一款,相較于定點系列,它為實時控制應(yīng)用帶來了領(lǐng)先的浮點性能和集成度,具有精度高、功耗小、存儲量大、A/D轉(zhuǎn)換快速等特點,且集成了主要的電機控制外設(shè)單元,含有多達18路的PWM輸出,其中6路為特有的更高精度的PWM輸出。這些優(yōu)點不僅使得系統(tǒng)設(shè)計外圍電路簡單方便,而且也使模塊程序的軟件編寫的難度降低,可以提高控制系統(tǒng)的集成化和可靠性。為了實現(xiàn)單DSP控制4臺電機,并且有較好的數(shù)學(xué)運算性能,本文采用F28335作為系統(tǒng)的核心控制單元。
2.2 PWM信號的產(chǎn)生
單個F28335的ePWM模塊最多能發(fā)出12路PWM波,僅能驅(qū)動2臺舵機。將DSP與CPLD結(jié)合,增加PWM數(shù)量以控制4臺舵機。CPLD由可編程互連矩陣單元組成,具有復(fù)雜的I/O單元互連結(jié)構(gòu),可根據(jù)需要編寫軟件生成特定的電路結(jié)構(gòu),完成相應(yīng)的功能。選擇芯片型號為LC4256,主要完成的工作是拓展PWM波、對PWM信號進行封鎖、處理過流信號等。三相逆變電路的橋臂上下管為180°互補導(dǎo)通。由于PWM驅(qū)動信號會由于各種原因產(chǎn)生延遲,可能造成一個開關(guān)管還未完全關(guān)斷,另外半橋的開關(guān)管已開通,此時上下管直通,電流突增,造成功率器件過流。為了防止直通造成的器件損壞,上下管的PWM驅(qū)動信號中需添加死區(qū),通過CPLD的移相和邏輯運算功能插入死區(qū)。將F28335發(fā)出的12路PWM波送至CPLD,對這12路PWM波進行移相,將移相前的PWM波和移相后的PWM波進行“與非”邏輯運算,得到三相橋電路上管的驅(qū)動PWM波;將移相前的PWM波和移相后的PWM波進行“或”邏輯運算,得到三相橋電路下管的驅(qū)動PWM波,如圖2所示。
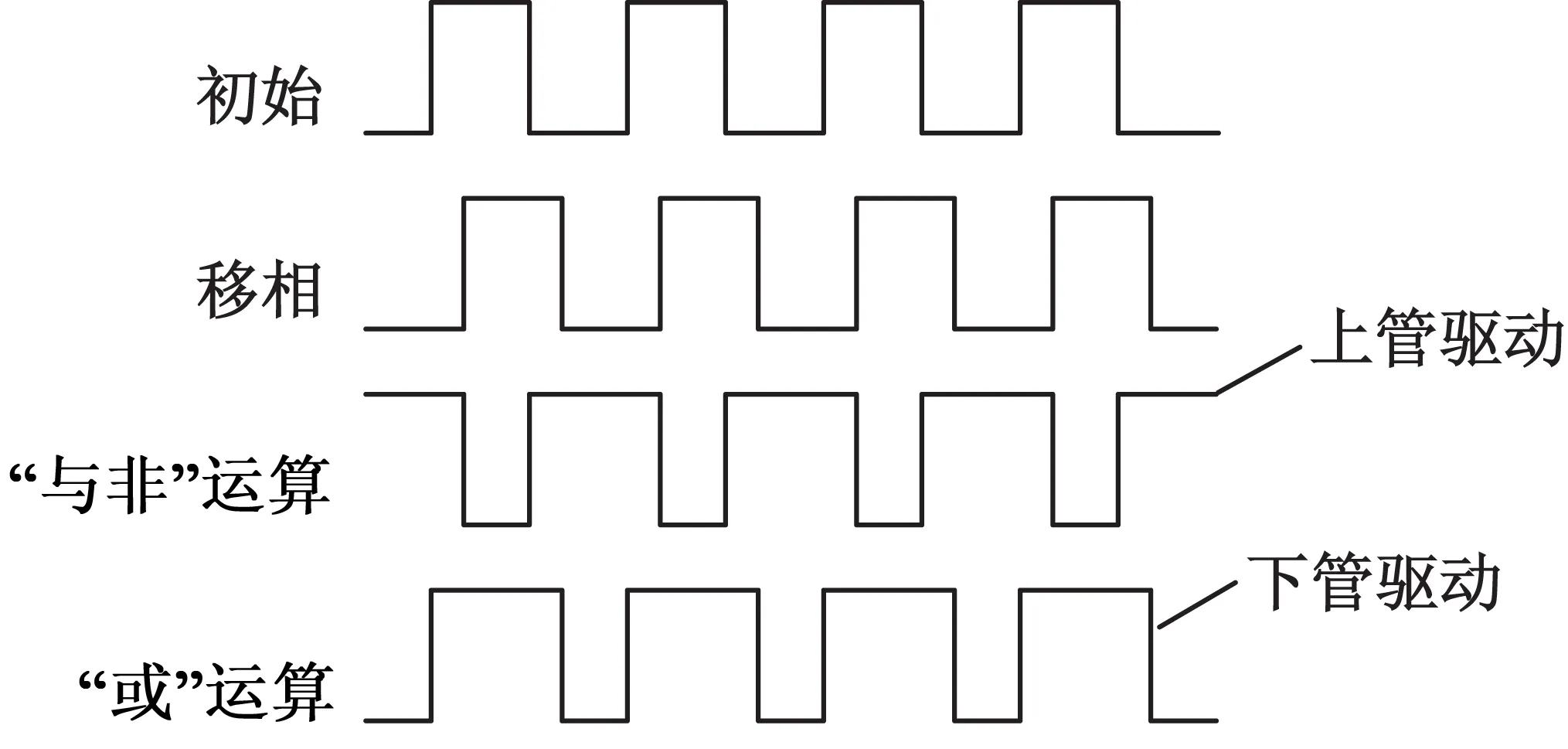
圖2 驅(qū)動PWM波產(chǎn)生
由此得到的驅(qū)動波形,既保證了上下管互補導(dǎo)通,同時又插入了死區(qū),防止上下直通。
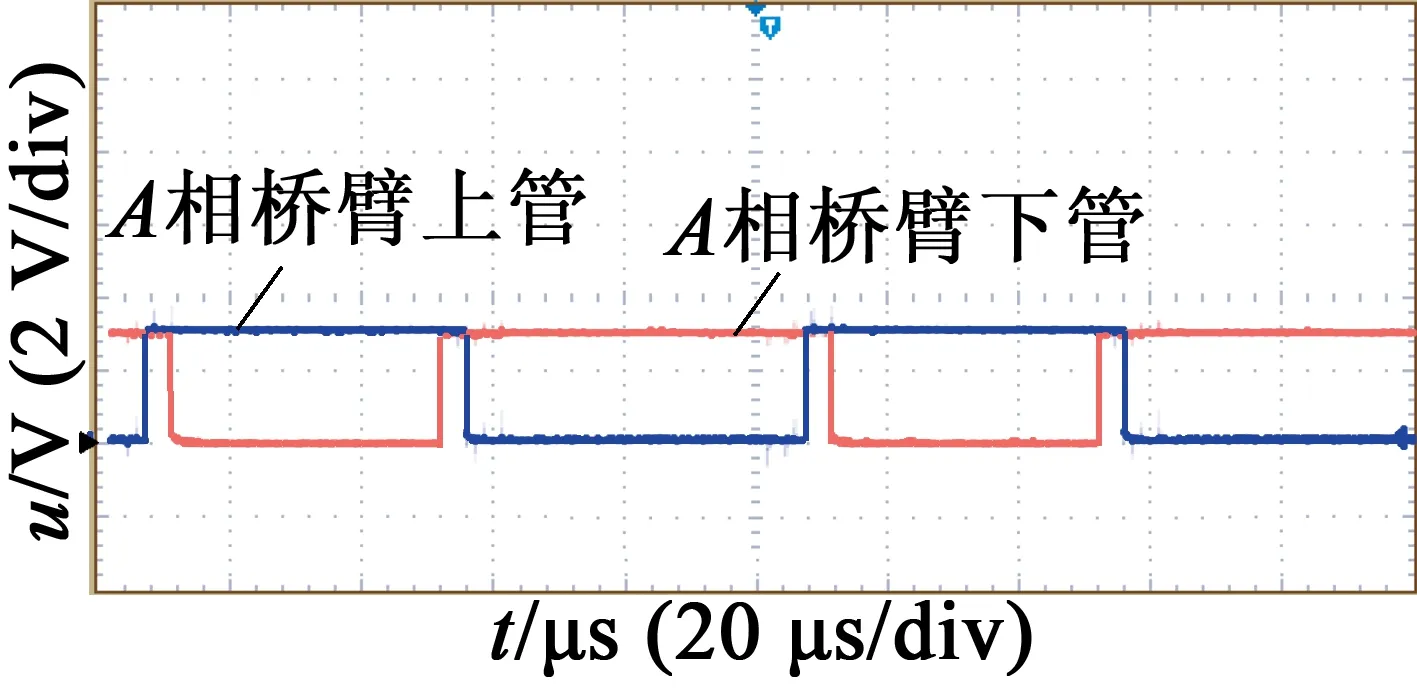
圖3 CPLD發(fā)出PWM波
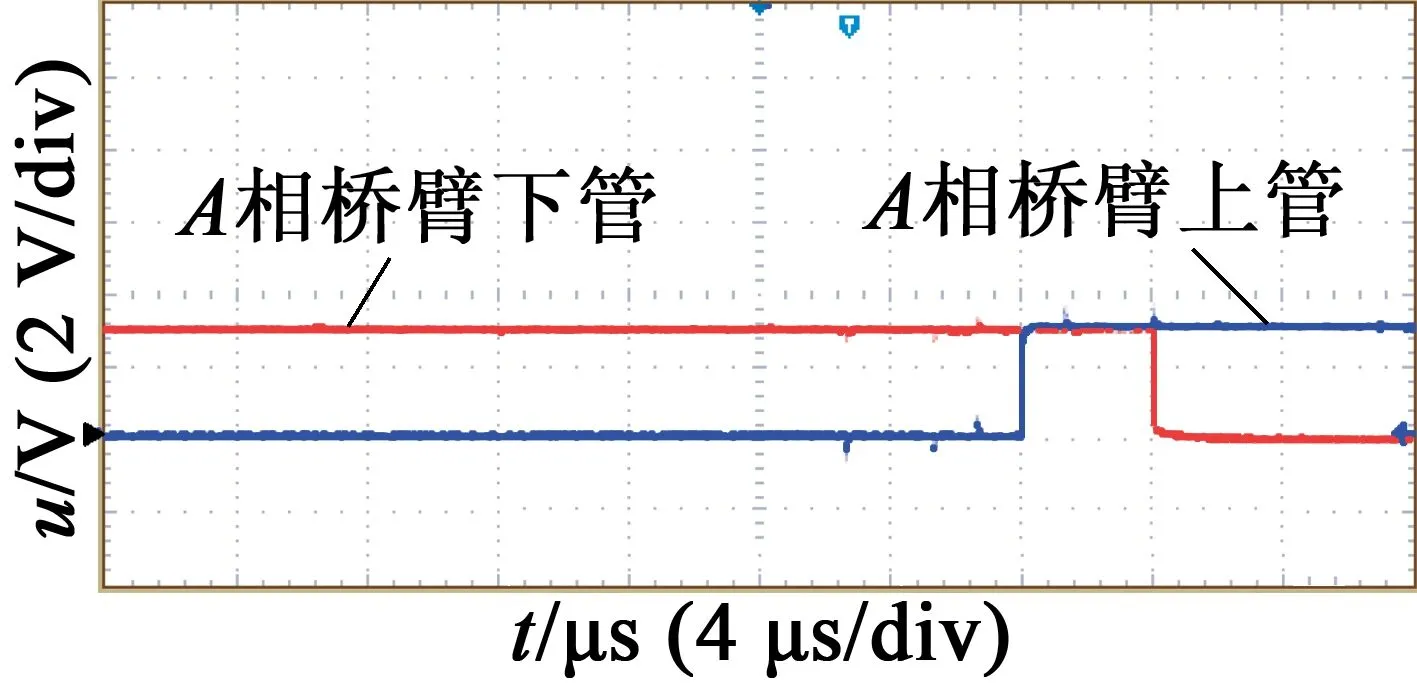
圖4 PWM波死區(qū)局部放大 CPLD除了具有拓展PWM,使之足夠驅(qū)動4臺舵機的功能,還具有信號封鎖和過流保護功能。當(dāng)檢測到過流信號時,CPLD接收反饋低電平,通過“或非”門之后與驅(qū)動信號進行“與”邏輯運算,進而封鎖PWM波,實現(xiàn)對系統(tǒng)的保護。
2.3 轉(zhuǎn)子位置檢測
在永磁同步電機定轉(zhuǎn)子上放置旋變來進行轉(zhuǎn)子位置的讀取,位置解碼電路包括旋變解碼芯片解碼電路和旋變激磁信號的放大電路2部分組成。解碼電路使用芯片AD2S1200對旋變輸出信號進行解碼,根據(jù)TypeⅡ閉環(huán)跟蹤原理,跟蹤輸入信號,將正弦和余弦輸入端的信息轉(zhuǎn)化為輸入角度和速度所對應(yīng)的數(shù)字量,其輸出的轉(zhuǎn)子角度只與正余弦信號的比值有關(guān),而與絕對值無關(guān),因而誤差小,噪聲抑制能力強。AD2S1200自身集成了片上可編程正弦波振蕩器,為旋變提供正弦波激勵信號。這個參考激勵輸出外部需接一個激磁信號的放大電路,來提供增益以及增大電流驅(qū)動旋變。激磁信號放大電路如圖5所示。
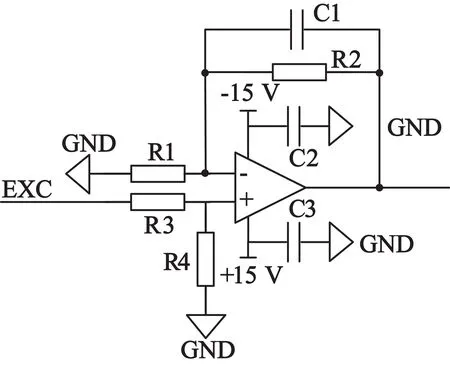
圖5 激磁信號放大電路

由于采用的旋變?yōu)槎嗄Υ═S2620N21E11,根據(jù)其手冊可知,其初級繞組需用7Vrms的電壓驅(qū)動,初級繞組阻抗為70+j100Ω,則激勵緩沖放大電路所需驅(qū)動電流有效值如下:
則需提供57.346mA驅(qū)動電流。

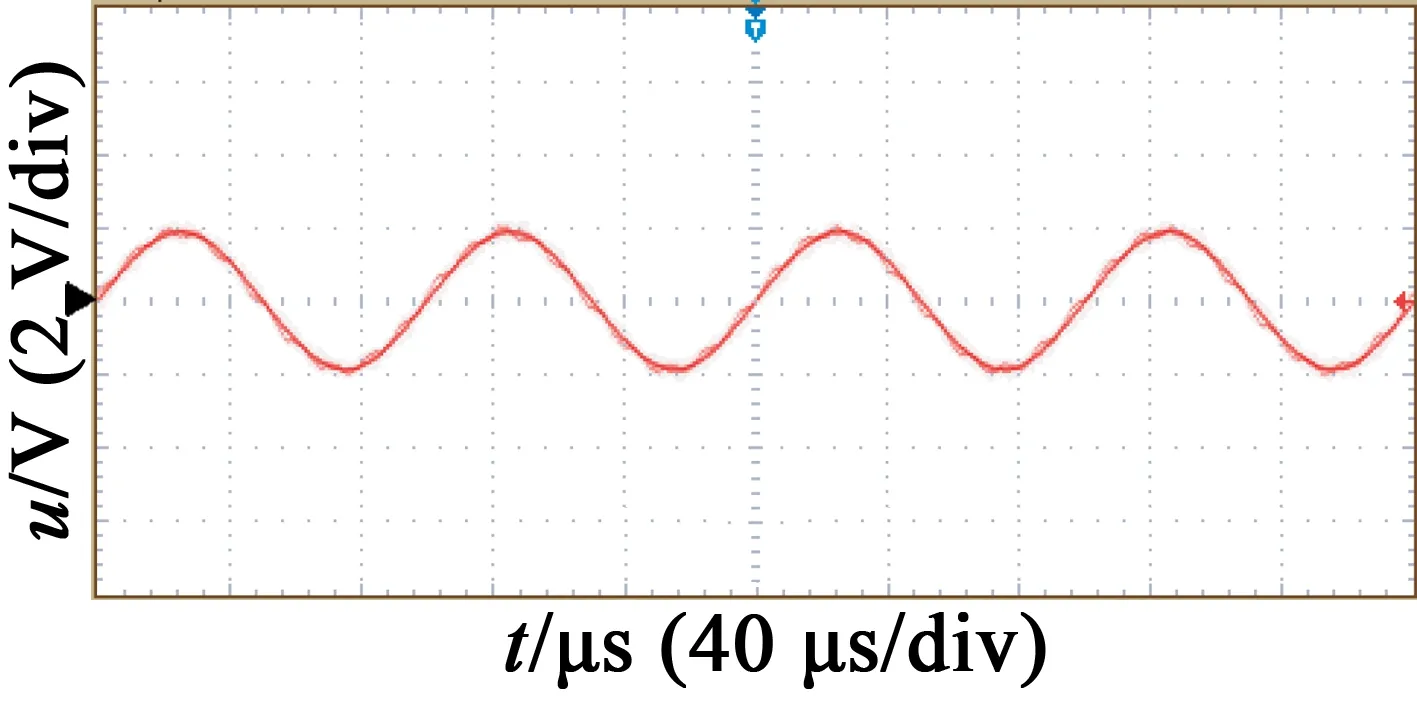
圖8 余弦信號波形
位置信號的讀取分為串口方式和并口方式。串口方式讀取需12μs,而并口方式讀取僅需3μs,當(dāng)開關(guān)頻率為10kHz時,程序運行空間僅為100μs。采用串口方式讀取4路輸出信號周期較長,不利于電機的控制。為了減少程序運行周期,保證程序正常運行,采用并口方式讀取輸出信號,通過DSP對旋變解碼芯片進行片選來實現(xiàn)對4臺電機的位置速度信號讀取,程序流程圖如圖9所示。
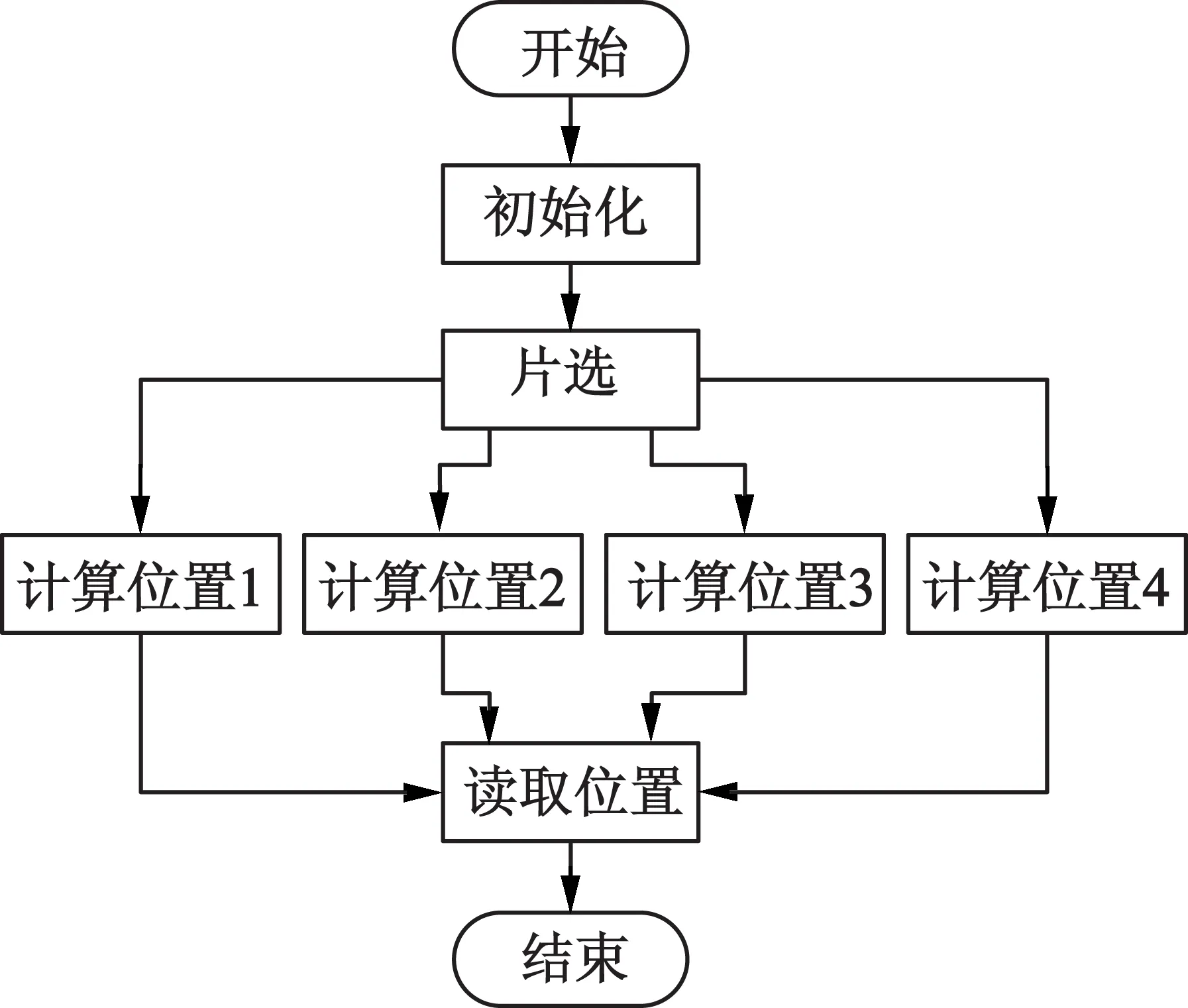
圖9 轉(zhuǎn)子位置讀取程序流程圖
4路解碼器的時鐘由NB3N551分頻電路獲得,以此來加強旋變解碼芯片工作的同步性,分頻電路如圖10所示。
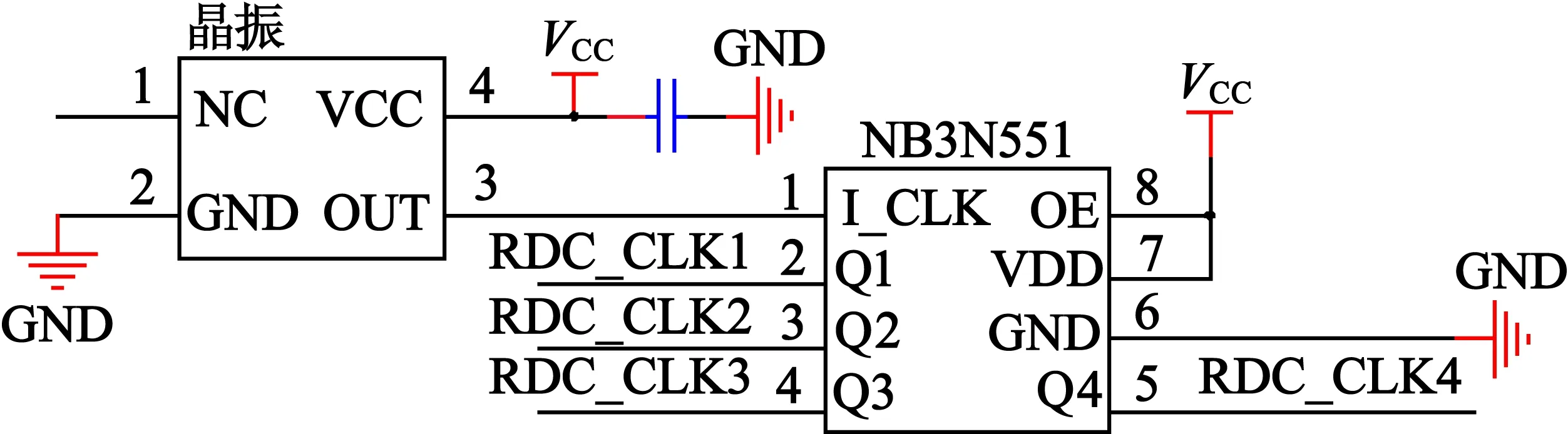
圖10 時鐘分頻電路
2.4 功率電路設(shè)計
功率電路由保護電路、隔離電路和驅(qū)動電路組成。保護電路檢測電流信號并反饋至DSP進行過流保護。當(dāng)直流母線過流時,會影響功率管的工作,甚至使功率管等器件損壞,從而不能正常工作,故必須對系統(tǒng)的母線電流進行監(jiān)視。采用電流檢測芯片ACS709LLFTR-35BB-T進行監(jiān)測,當(dāng)母線過流時,會產(chǎn)生信號反饋到DSP以封鎖PWM信號。
隔離電路采用光耦將控制電與驅(qū)動電隔離,使之沒有直接電氣連接,防止不必要的干擾。采用光耦HCPL0454,改變PWM信號電平后送給功率模塊。信號的單向傳輸,完全實現(xiàn)了輸入端與輸出端的電氣隔離。
驅(qū)動電路通常由分離元器件搭建或者使用智能功率模塊(IPM)搭建而成。考慮到獨立的MOS管搭建電路體積較大,且電路調(diào)試過程較為復(fù)雜,使用IPM構(gòu)建功率電路。由于受控舵機的直流工作電壓為90V,則三相逆變電路的功率管承受的最大反向電壓為90V,考慮到2倍裕量,MOS管耐壓需達到180V。選用MSK公司的功率模塊,型號4322。MSK4322內(nèi)部集成了耐壓200V的MOSFET,最大承受電流20A,內(nèi)部能產(chǎn)生2μs上下管驅(qū)動死區(qū)防止直通。
3 系統(tǒng)軟件設(shè)計
由于彈用舵機控制系統(tǒng)本身對體積質(zhì)量及功率密度要求較高,因此提出了單DSP控制4臺舵機的硬件方案。為了實現(xiàn)該方案,同時保證系統(tǒng)的精確度,選取合適的開關(guān)頻率并對程序進行精簡。取開關(guān)頻率為10kHz,程序流程圖如圖11所示。
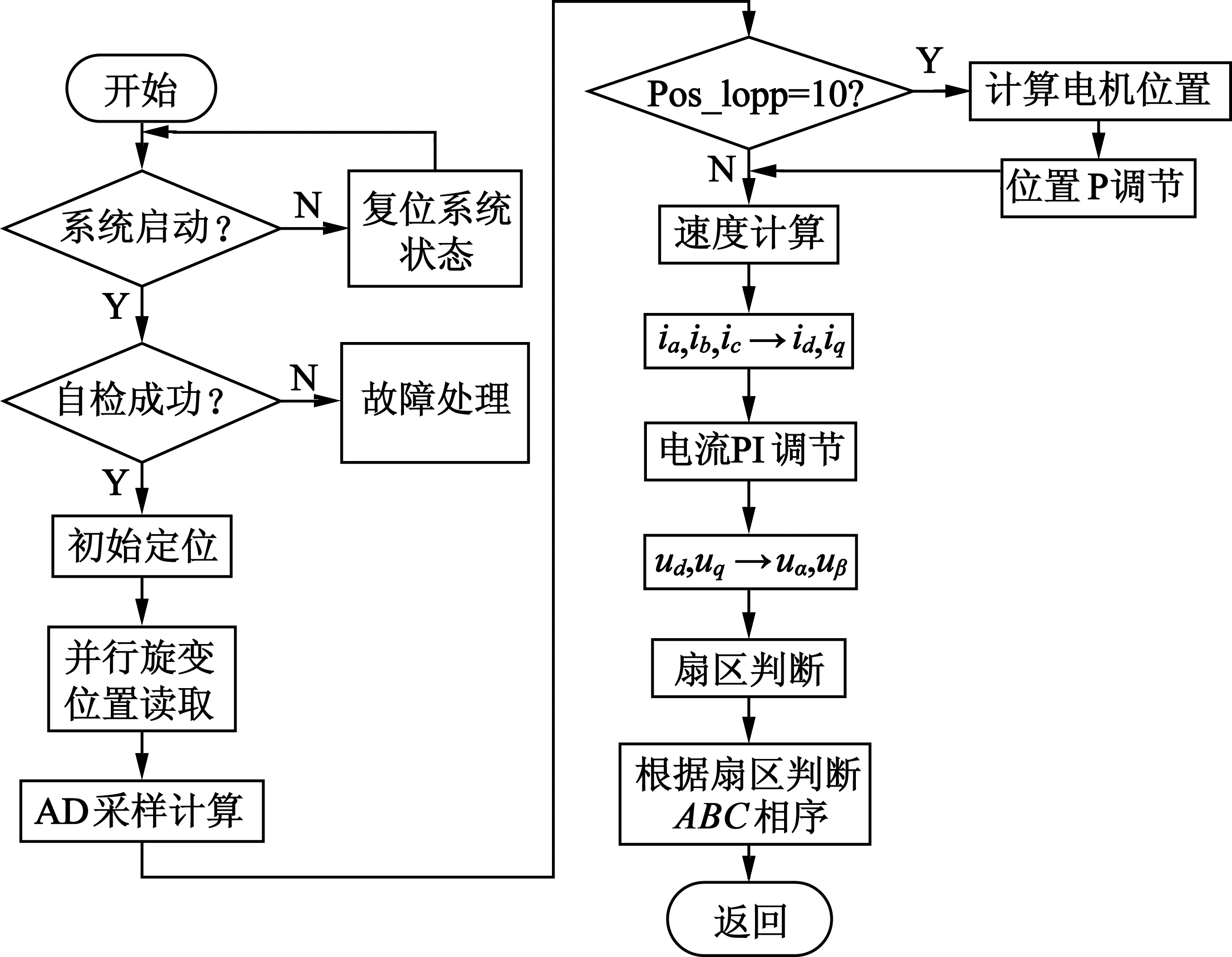
圖11 程序流程圖
采用模塊化的編程方式,在TI提供的開發(fā)環(huán)境CCS中進行系統(tǒng)軟件設(shè)計。整個程序包含頭文件、庫文件、地址分配文件和源文件等。主程序主要完成控制系統(tǒng)的初始化,包括各模塊寄存器的配置和程序中使用參數(shù)變量的初始化。中斷源采用定時器下溢中斷,當(dāng)中斷發(fā)生,進入中斷子程序執(zhí)行系統(tǒng)核心控制算法,包括電機位置讀取、AD電流采樣處理、轉(zhuǎn)速計算、故障檢測、坐標變換、PI調(diào)節(jié)器和數(shù)字SPWM調(diào)制等。對舵機實行外環(huán)位置環(huán)、內(nèi)環(huán)電流環(huán)的雙閉環(huán)控制,采用的控制策略為矢量控制,控制框圖如圖12所示。

圖12 雙閉環(huán)控制框
4 實驗結(jié)果
在已搭建的Labview平臺上對舵機系統(tǒng)進行位置閉環(huán)測試。給定幅值3mm的階躍信號,觀察位置反饋跟隨狀況。實驗波形如圖13所示。
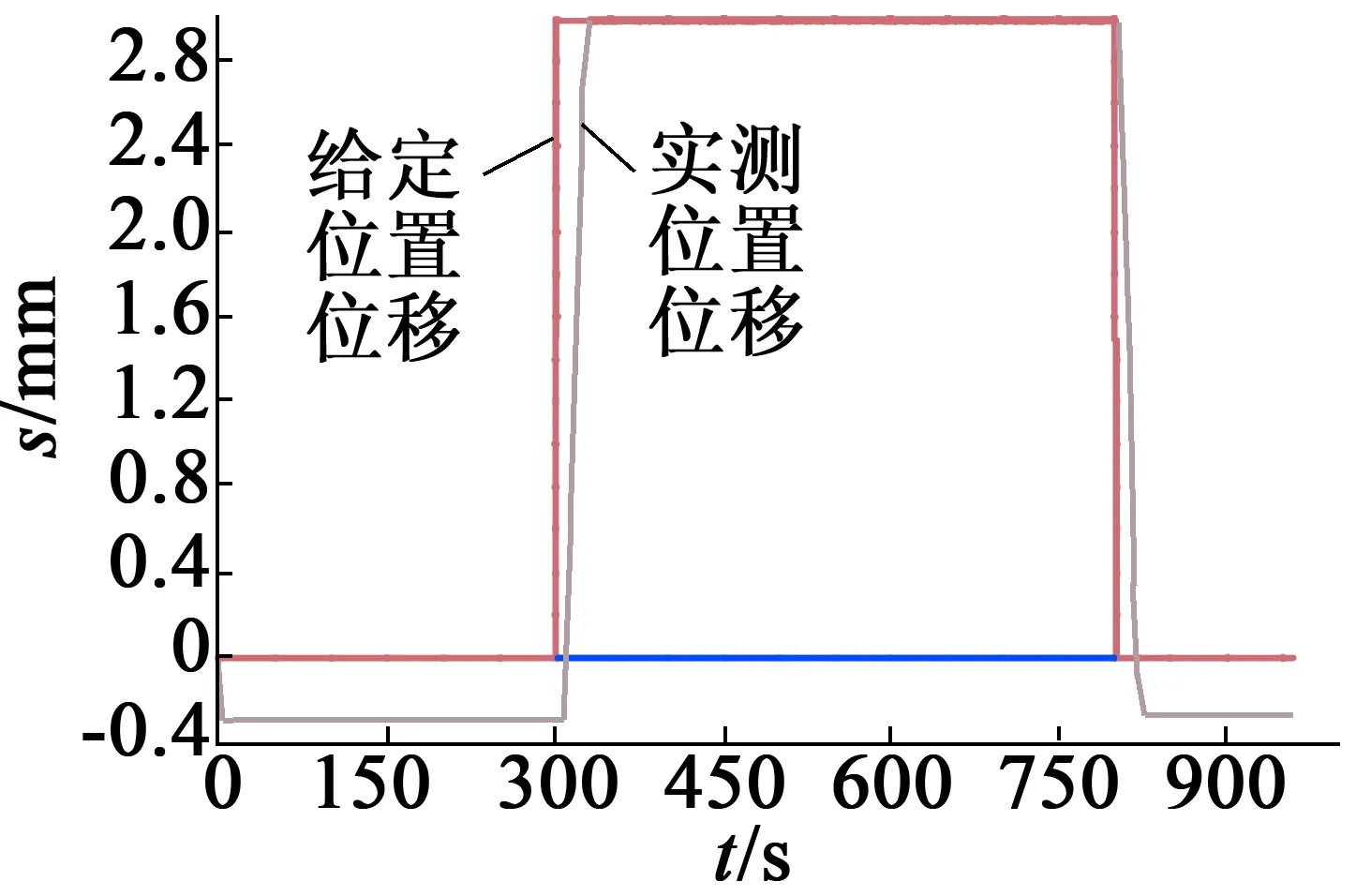
圖13 給定階躍信號下位置跟隨
觀察波形發(fā)現(xiàn),起始零位存在0.3mm誤差,在系統(tǒng)允許誤差范圍內(nèi),動態(tài)響應(yīng)時間短,無超調(diào),無穩(wěn)態(tài)誤差,跟隨性能良好。
給定幅值為3mm的正弦波信號,觀察位置反饋跟隨狀況。實驗波形如圖14所示。
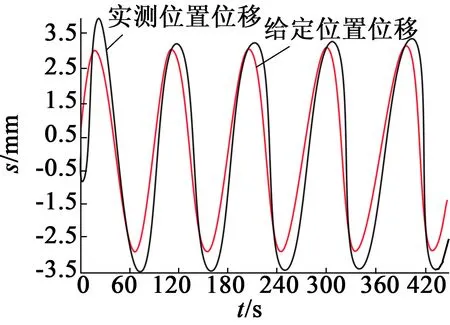
圖14 給定正弦信號下位置跟隨
第一個半周期內(nèi),位置跟隨存在超調(diào),隨后跟隨性能良好。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
