機器人用直驅永磁電機研究與發展綜述
2018-08-09 08:28:02郭有權司紀凱劉群坡李應生曹文平
微特電機 2018年7期
郭有權,司紀凱,劉群坡,李應生,曹文平
(1.河南理工大學,焦作 454003;2.鄭州潤華智能設備有限公司,鄭州 450001;3.阿斯頓大學,伯明翰 B47ET,UK)
0 引 言
近來年,隨著產業結構的轉型與升級,機器人技術被看作是未來高技術、新興產業發展的重要方向之一,已經引起了科學界與學術界的高度重視[1]。直驅永磁電機用作機器人的動力源,具有極大地應用潛力,也成為了近年來研究的熱點之一。為了彌補傳統機器人因減速器而存在傳動間隙大、齒輪磨損、維護頻繁、機械噪聲和效率低下等缺陷,研究人員提出了具有效率高、損耗低控制精度高和安裝維護方便等優勢的機器人用直驅永磁電機,優化了傳動系統,顯著提升了機器人的系統性能。
直驅永磁電機直接驅動負載,提高了機器人工作效率等性能,但也有新問題隨之產生。機器人驅動系統中的各種擾動直接作用到電機上,直驅永磁電機對轉矩波動、電機參數和負載轉矩變化的敏感性增強,從而影響傳動和定位的準確性。對于系統控制,機器人運行系統中的不利因素將直接作用到負載上,系統控制變得更加困難,還可能出現諧振現象。低速時,直驅永磁電機作用在機器人負載上的不利影響將被放大,顯得尤為突出,比如磁阻效應、齒槽效應、高次諧波脈動等[2]。針對上述問題,如何提高機器人用直驅永磁電機的性能,國內外學者對此做出了大量的研究工作。在直驅永磁電機的設計中,為了獲得低速大轉矩等特性,電機必須采用粗短的電樞結構和多極化;在電機性能優化上,采用分數槽繞組、極/槽數配合、斜極和斜槽等方法減小磁動勢諧波含量、電機振動、齒槽轉矩和徑向力的脈動;在直驅永磁電機磁場解析上,主要有等效磁路法、磁網絡法、解析法和數值解析法,以及由電磁場解析法衍生出的方法;在控制方面上,提出矢量控制、直接轉矩控制和智能控制等控制技術。
文獻[3]分析了機器人結構模型,得到直驅式永磁電機的輸入參數;對比西門子電機的技術指標和外形尺寸,采用場路結合法對電機進行磁路設計分析,不斷地優化永磁體形狀和減小齒槽轉矩,提高直驅永磁電機的性能。文獻[4]針對電機使用的特殊環境,設計了一種直驅低速大轉矩的永磁同步電機,采用有限元法對電機進行仿真和優化,驗證了該結構設計能夠顯著提高驅動系統的整體性能。文獻[5]為了準確評估滑槽效應,提出了一種用于計算直驅式永磁電機氣隙磁密的半分析法,經過不斷實驗,驗證了這種方法的準確性和可靠性。文獻[2] 基于機器人直接驅動方式的特點,分析了永磁同步直驅電機的控制技術,利用MRACS與模糊算法相結合的控制技術進行仿真,驗證各種算法的準確性。文獻[6]對比分析了交流異步減速電機和直驅永磁電機在復雜工況、負載變化情況下的運行情況以及性能,驗證了直驅永磁電機在實際應用中具有的優良性能。文獻[7]介紹了機器人用直驅永磁電機的伺服控制、混沌控制和弱磁調速控制等控制技術。
本文參考并總結了近年來國內外研究學者在機器人用直驅永磁電機方面所做的研究,從電機的磁路方面,分析了目前機器人用直驅永磁電機的結構類型;從電機設計優化、磁路計算及優化、應用領域和控制方式等方面總結了目前的相關研究現狀;討論了機器人用直驅永磁電機未來的研究發展方向。
1 直驅永磁電機結構類型
隨著電力電子、計算機控制和機電一體化等技術的不斷發展進步,各種直驅永磁電機被廣泛地應用于機器人。下面按照機器人用直驅永磁電機磁通方向,介紹了其結構、工作原理和研究現狀及優缺點。
1.1 徑向磁通永磁電機
徑向磁通永磁電機是由永磁體產生的磁場沿徑向穿過氣隙、定子和轉子形成閉合回路而定義的,也是目前市場上最多、最常見的永磁電機類型。徑向磁通永磁電機以其結構簡單、技術成熟、制造方便以及少漏磁的優點,被廣泛地應用于各個領域。
徑向磁通永磁電機的研究已經相當成熟,其定子結構基本一致,區別在于轉子結構,主要有轉子位于定子內側的內轉子結構和轉子位于定子外側的外轉子結構。內轉子結構是最傳統的結構類型,如圖1(a)所示,該結構具有體積小、通風效果良好和溫升低等性能;外轉子結構具有永磁體安裝方便、轉子可靠性高等優點,但其轉動慣量大、通風效果不佳,其結構如圖1(b)所示。
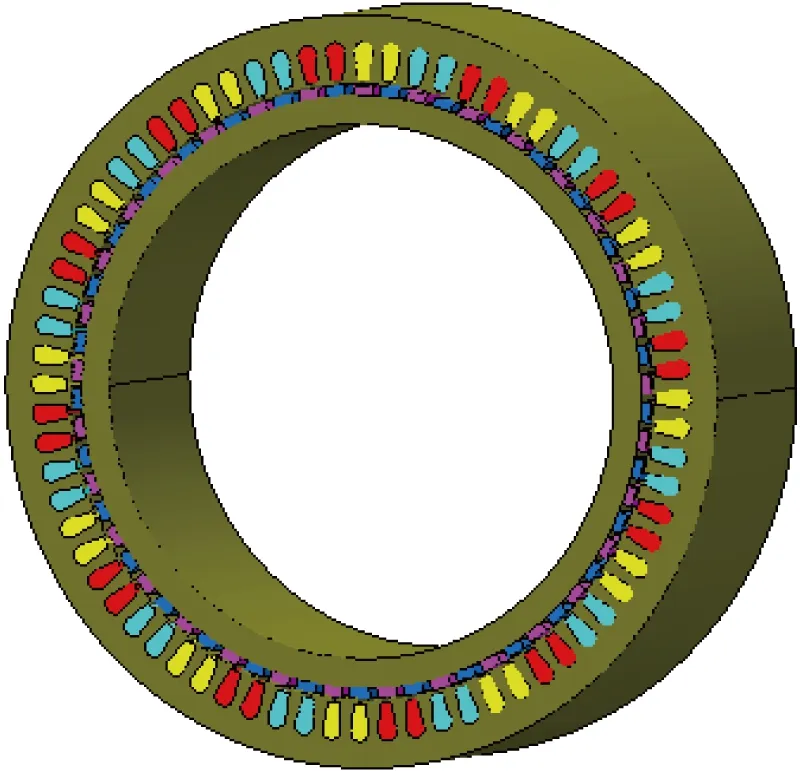
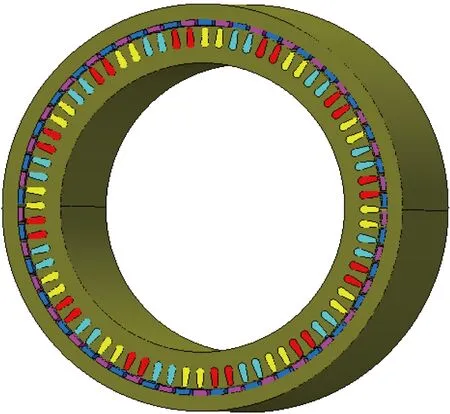
近年來,研究學者提出了一種新型徑向磁通永磁電機,通過Halbach陣列使磁通量集中來提高電機的性能;實驗證明鐵磁轉子磁軛能夠增大轉矩,而非磁轉子磁軛能夠提高功率因數[8]。結構如圖2所示。
新型徑向磁通永磁電機定子有20個電樞齒,每個電樞齒含有兩個通量調制極;采用分數槽單層集中繞組實現各相之間電、磁和熱等物理量的隔離,顯著地減小端部繞組的長度和銅耗;外轉子結構增大了電機的轉矩密度,提高了定子的空間利用率。
(a) 內轉子
(b) 外轉子
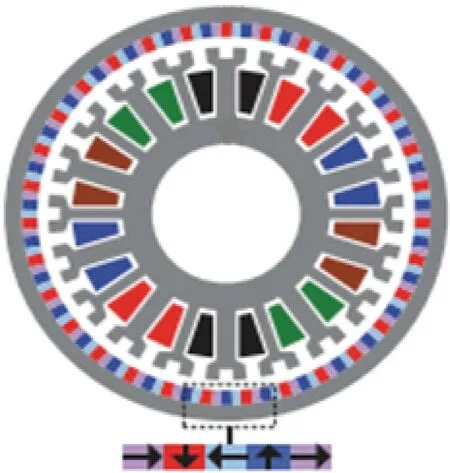
圖2 新型徑向磁通永磁電機結構
為了進一步提高電機的轉矩密度和結構緊湊程度,徑向磁通永磁電機采用多轉子或多定子復合結構[9]。雙定子永磁電機減少齒體寬度來固定繞組,采用將磁體形狀制成為具有平行磁化方向的矩形、轉子靴固定永磁體和制造轉子孔等方法來固定轉子支撐件以及組合轉子心和永磁體;永磁體懸突的轉子結構也是其獨特創新之處,其結構如圖3所示。

圖3 雙定子徑向磁通永磁電機結構
英國Cytec公司研制的TK系列無框架式徑向電機具有良好的性能,但仍存在徑向結構的固有限制,即電磁競爭關系沒有得到有效解決,功率密度低,價格高等。它與普通徑向電機參數的比較如表1所示。
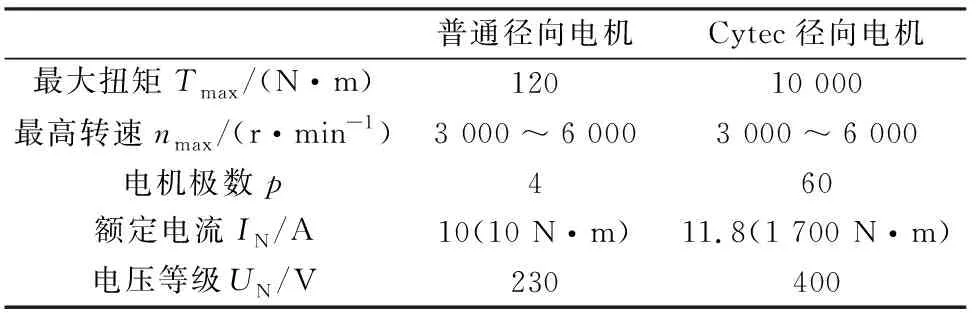
表1 Cytec徑向電機與普通徑向電機的參數比較
徑向磁通永磁電機是最常規、最普通的永磁電機形式,其結構簡單,漏磁小等優勢非常有利于機器人的裝配,并且維護方便;但是存在體積大、軸向長度大等不足,不利于機器人的微型化發展。
1.2 軸向磁通永磁電機
軸向磁通永磁電機在過去30年一直都是全球范圍內的重要研究工作主題,發展至今,技術已經相當成熟。與徑向磁通永磁電機相比,軸向磁通永磁電機整體呈盤狀,軸向長度短,故又稱盤式電機。軸向磁通永磁電機有轉矩大、功率密度高、軸向長度短、結構緊湊、體積小和質量輕等優點,廣泛應用于汽車、輪船、風力發電以及機器人等領域。
軸向磁通永磁電機的定轉子對稱放置,并呈圓盤形;對稱排列的定轉子使其具有良好的散熱性和高功率密度。軸向磁通永磁電機的結構類型有單定子-單轉子、雙定子-單轉子、單定子-雙轉子和多級結構4種類型[10],依次如圖4所示。

(a) 單定子-單轉子
(b) 雙定子-單轉子
(c) 單定子-雙轉子

(d) 多級結構
上述4種結構的主要區別在于產生力矩的能力,也為軸向磁通永磁電機在不同場合的應用提供了更多的選擇。研究結果表明,在電機的基本參數確定的情況下,轉矩隨著級數的增加而增大,多級結構轉矩最大,雙定子-單轉子結構和單定子-雙轉子結構次之,單定子-單轉子結構最小;結構難度隨著轉矩變大而增加。因此結構的選擇要根據具體情況而定,做到既符合要求又節約資源。
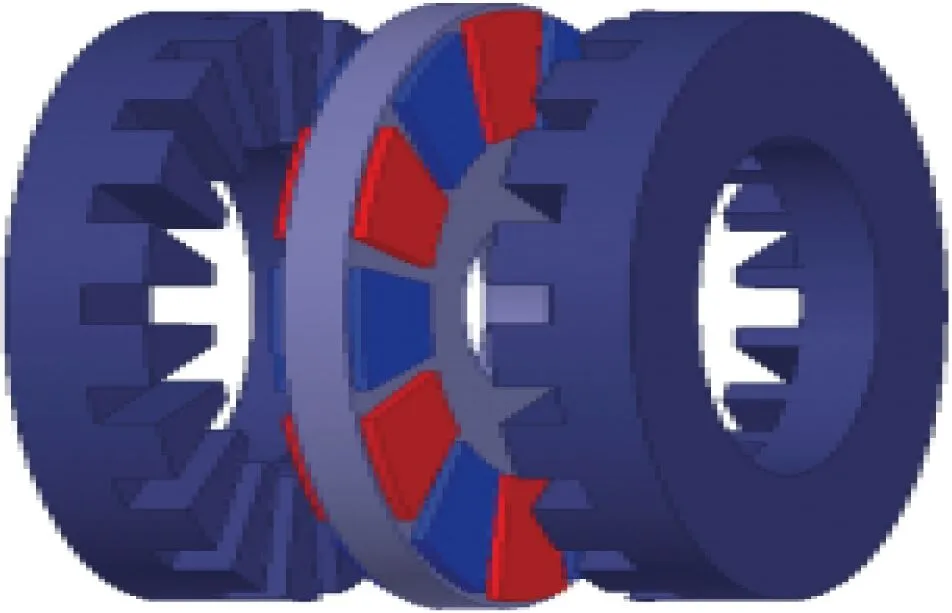
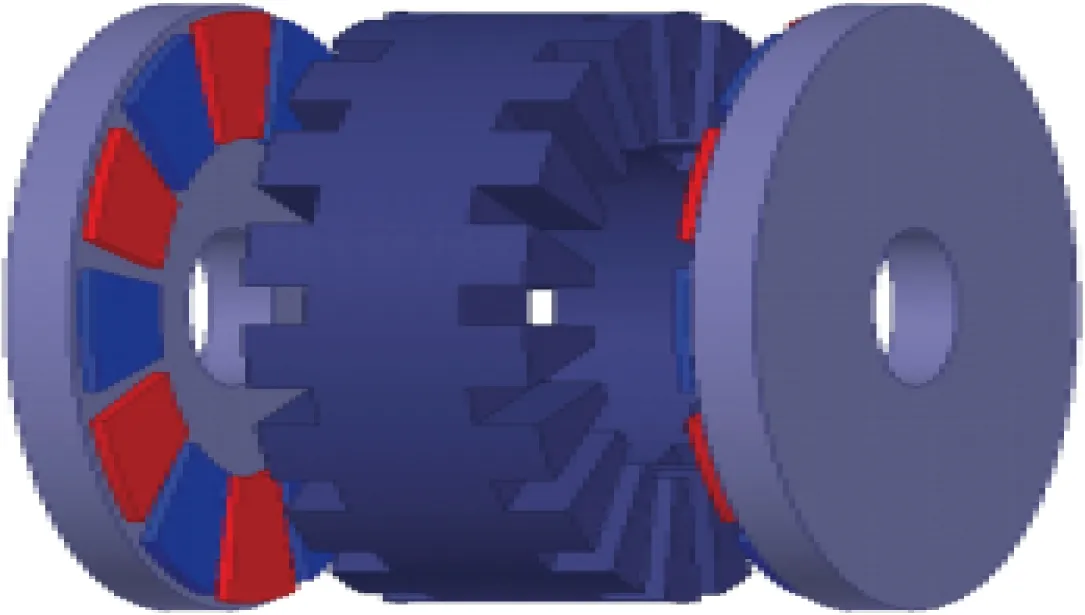
近年來,研究人員提出了一種新型的多級軸向磁通永磁電機拓撲結構。這種新型多級永磁電機采用開槽磁鋼拓撲結構、電樞分段(YASA)、無軛定子、橢圓形定子齒和柔性電源電路等方法實現模塊化;電樞結構是NN圓環的卷繞結構與拓撲NS圓環的短定子軛結構結合而來的。以兩級的2kW,1 000 r/min的10極12槽的MM-AFPM為例,其參數如表2所示[11],其結構與磁路如圖5所示。
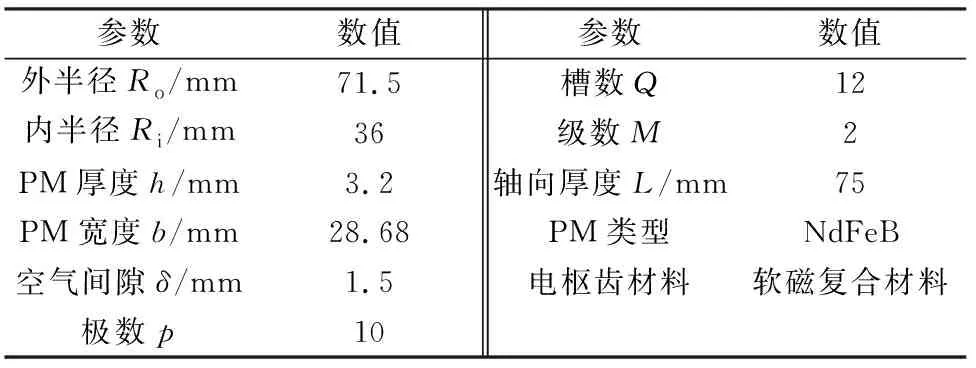
表2 MM-AFPM參數
MM-AFPM由2個分段的無軛定子和在3個轉子上的4個PM層組成,如圖5(a)所示;圖5(b)顯示了MM-AFPM的基本通量路徑。
軸向磁通永磁電機具有結構多樣,力矩密度大,低速運行平穩等優勢,使得機器人的直驅方式特性得
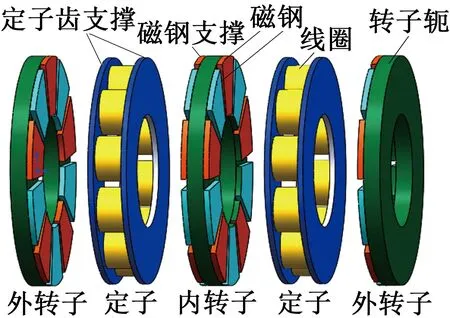
(a) 結構3D模型
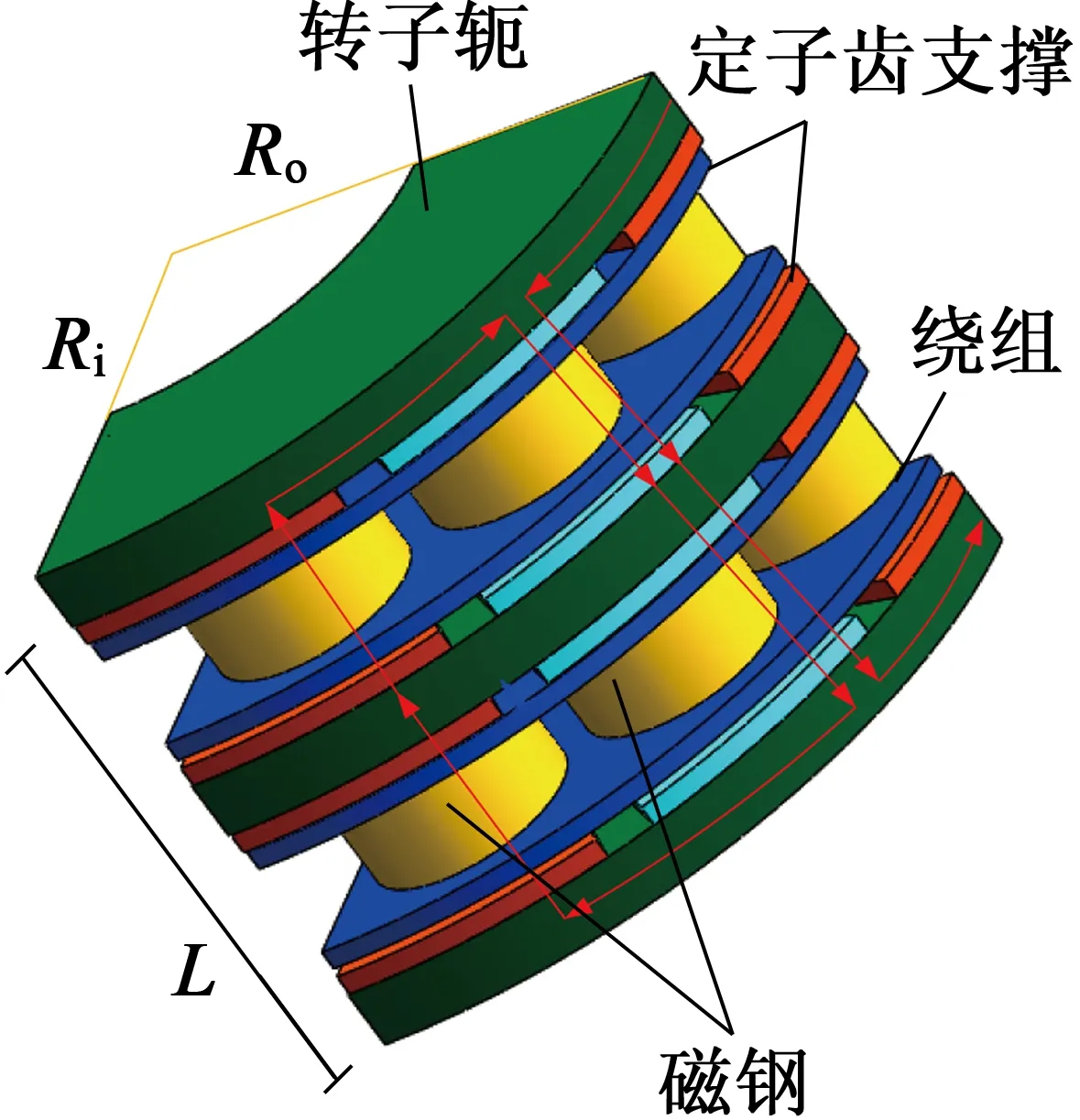
(b)基本磁路
到了更好的發揮。但該電機結構復雜,制造困難,不便于安裝與維護;作為機器人動力源還處于實驗研究階段,仍有漏磁大以及轉矩脈動大等問題需要解決。
1.3 橫向磁通永磁電機
為了克服傳統永磁電機增加磁通量和電流密度乘積相制約的矛盾,獲得更大的轉矩密度。針對這一問題,國內外學者在理論和實踐等方面做出了大量的研究和探索,也取得了較大的成果。德國HerbertWeh教授于20世紀80年代初期提出的橫向磁通永磁電機(以下簡稱TFPM)是最具代表性的[12],其結構如圖6所示。
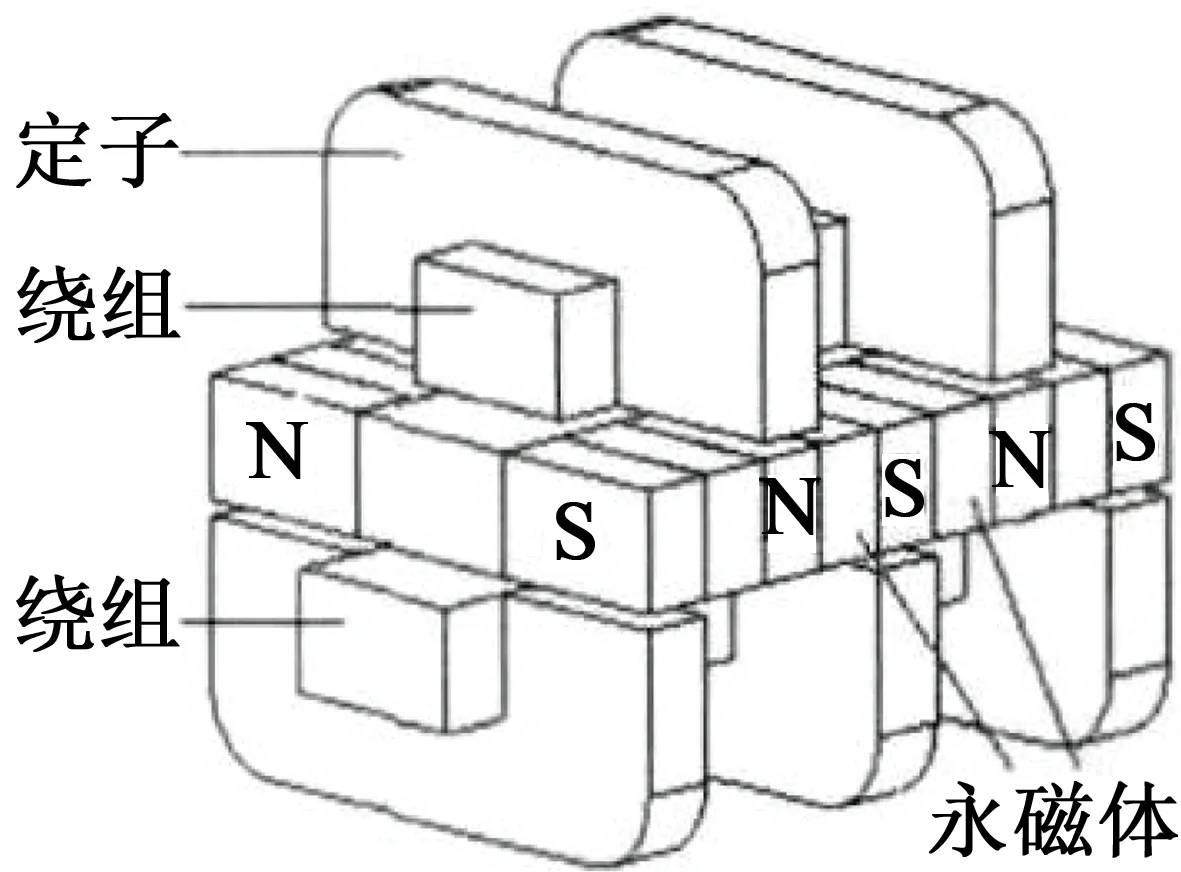
圖6 橫向磁通永磁電機結構
TFPM的結構克服了普通電機電樞線圈和定子槽在空間上相互制約的困難,形成相互垂直的結構,而這種結構能夠使主磁路與繞組結構相互獨立,定子尺寸設計不受繞組結構的限制。電機的設計方便靈活,定子磁場和轉子磁場能夠解耦,獲得更高的電磁氣隙力密度和良好的運行特性。與傳統電機相比,TFPM能提高電機的穩定性和可靠性等特性。磁路的空間性既是TFPM的優勢,也是制約其進一步推廣的因素。
針對如何改善TFPM的結構復雜性及加工難度,研究學者提出了一種新型組合式TFPM。四相組合式的多極結構TFPM是由多模塊組合而成,每相模塊采用組合式定子來降低加工難度和采用聚磁式轉子來提高氣隙磁通以及使用集中式環形電樞繞組降低繞制難度[13],其結構如圖7所示。
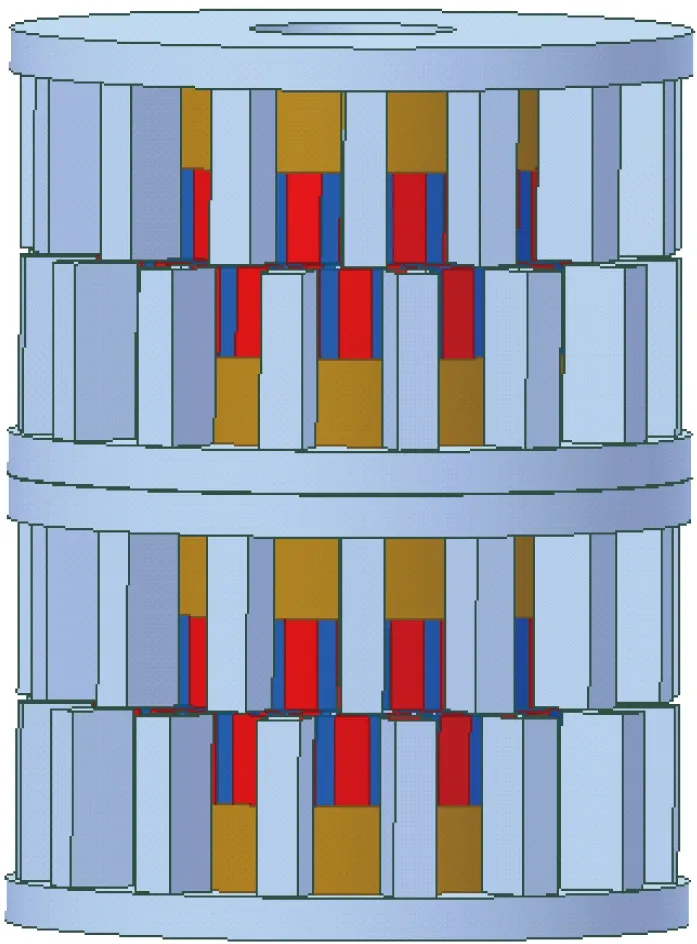
圖7 四相組合式的多極結構TFPM
為了避免磁路中長路徑的出現,相鄰兩相以相同磁鋼極數順序排列使轉子磁鋼位置對齊,定子相互錯開一個極距,使相鄰兩相間形成磁通短路徑。每相均為雙氣隙結構,提高了氣隙磁通密度,得到更大的輸出轉矩。電機的整體是由多相模塊化構成,相互之間互不干擾,提高了電機整體的容錯性。
與外轉子永磁爪極電機不同,新型外轉子橫向磁通永磁爪極電機的轉子由一個內表面內置永磁體的非導磁圓筒構成,2個法蘭盤較短的爪極相對裝配[14],結構如圖8所示。

(a) 內定子結構
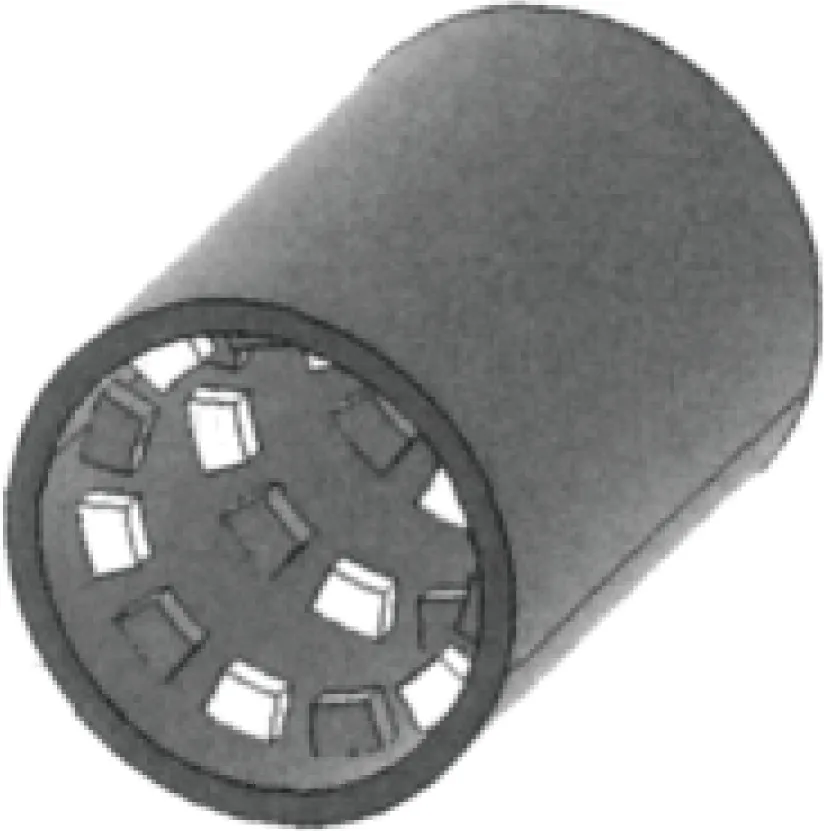
(b)外轉子結構
新型外轉子橫向磁通永磁爪極電機具有結構簡單、可靠性高、高槽滿率、轉矩密度大和易實現多極化等優勢,使其被廣泛應用于汽車領域;在風力發電、調速和伺服以及機器人等領域也有很好的應用前景。但是這種結構并不完善,仍有許多問題尚未解決,處于探索階段,比如功率因數較低,需要較高的驅動變換器功率等級等問題。
2 直驅永磁電機設計分析方法
機器人用直驅永磁電機需要根據實際的工況來設計,因此合理的磁路分析方法對快速設計電機非常重要。目前直驅永磁電機設計分析方法有很多種,主要有等效磁路法、磁網絡法、解析法和數值解析法,以及由電磁場解析法衍生出的方法,諸如場路耦合法、解析數值結合法。
等效磁荷法是依據等效磁荷理論,利用磁體中假設的磁荷來產生磁體空間磁場,磁場強弱由磁化強度決定,因此磁體磁場可以用按照一定規律排列的磁荷來等效[15];全局解析法是整個定子以槽數均分成相互獨立的子區域,分析單個子區域以及獨立區域間的影響,得到全局的解析[16]。數值解析結合法將所求區域劃分為許多細小的網格,利用網格邊界和節點將網格相互連接在一起,建立以所有網格各節點為未知量的代數方程組,求解方程組得到各節點的函數值。數值解析結合法主要用于求解電機的磁場問題,將電機的求解區域分為定子、轉子和氣隙3部分,定子和轉子區域采用有限元法分析,氣隙磁場采用解析法分析,利用磁場邊界條件將兩類方程組整合成一個完整的方程組。
上述的解析分析法均是針對具體的研究對象提出來的,也驗證了它的準確可行性,但也存在相應的缺陷,能否進一步推廣有待繼續研究。等效磁荷法直觀形象,計算量小,但使用局限性較大,結果不太精確,想要得到精確的結果必須借助于其他的分析方法;全局解析法計算結果精確,更接近于實際情況,但是計算過程復雜,使用范圍有限;數值解析結合法綜合了解析法表達式明確、易于理解和普適性的優勢以及數值法的計算精確、運算量少的優點,是目前最有效、應用最廣泛的磁路分析方法。
3 直驅永磁電機控制技術
機器人用直驅永磁電機具有較高的定位精度和動態特性。由于機器人對外部干擾和負載擾動更敏感,所以機器人用直驅永磁電機需要更好的控制技術來滿足機器人直驅方式的要求。經過不斷地研究和驗證,變壓變頻調速控制、矢量調制方式、直接轉矩控制以及近來發展起來的預測控制都是應用于實踐的非常有效的控制技術。
變壓變頻調速控制是永磁電機調速系統技術最成熟、最完善、應用最多的控制技術,其具有直流傳動特性以及體積小、質量輕、動態響應好、維護簡單和節約資源等優點。變壓變頻調速技術取得了長足的發展,從推導過程也不難發現,這種控制技術對穩態問題有很強的實用性;對暫態問題有很大的局限性。
矢量控制理論具有效率高、可靠性高和轉矩密度大等優勢,被廣泛應用于永磁電機[17]。永磁電機的矢量控制中采用電流控制較多,主要方式有弱磁控制、最大轉矩/電流比控制和最大功率輸出控制。矢量控制系統能夠實現高精度、大范圍調速和定位控制以及快速動態響應等良好特性,但是對轉子磁鏈的難預測性、低速時電阻的影響較大和坐標變化的復雜性等問題都使得矢量控制實際應用與推廣受到很大的阻礙。
直接轉矩控制是為了彌補矢量控制系統本身存在的不足而發展起來的。直接轉矩控制是由德國和日本學者首先提出的,利用轉矩、磁鏈等兩個滯環控制器輸出值以及求解區域的定子磁鏈域等參數選擇預測開關表中合適的電壓空間矢量,繼而控制轉矩和磁鏈[18]。直接轉矩控制不需要將交流電機解耦成等效電樞和勵磁電流來控制轉矩,也不需要進行相當復雜的坐標旋轉變換和矢量等效變換,只需要在保證定子磁鏈幅值不變的前提下,調節負載角控制轉矩。直接轉矩控制也存在一些不足,諸如其磁鏈和轉矩的脈動比較大、逆變器的開關頻率會隨著磁鏈、負載轉矩以及轉矩滯環控制的滯環寬度等變化而改變等。
目前,為了改善直接轉矩控制存在的不足,研究人員已經提出了改進的控制技術[19],比如基于恒定開關頻率的直接轉矩控制算法,結合矢量法的直接轉矩控制技術,無位置傳感器直接轉矩控制技術,都能有效地彌補直接轉矩控制技術中存在的不足。
除了上述控制技術,近年來,預測控制技術被提出并不斷得到推廣應用[20],預測控制基于穩態系統建立預測模型,不斷滾動優化得到每個周期內的最優結果,對優化結果進行反饋校正,增強了系統的魯棒性和可控性。在現場控制精度更高的要求下,單一的控制技術或理論已經不能滿足需求,多種控制理論結合形成的新控制技術不斷出現,諸如直接轉矩矢量電壓控制法,矢量變頻調速法,預測矢量控制調速法。
4 直驅永磁電機的發展方向
直驅永磁電機具有大轉矩、低損耗、動態響應速度快和高精度等優勢,取代了原來的“電機+減速器”模式,使機器人的驅動系統性能大幅度提升,因此具有很大的應用潛力。
經過對現有的文獻進行分析與總結,機器人用直驅永磁電機仍有許多問題有待進一步研究與分析:
(1) 直驅永磁電機拓撲結構設計研究。直驅永磁電機具有多種結構形式,拓撲結構多樣化。永磁體的發展非常緩慢,這就使得如何有效地利用較少的磁體獲得最大的轉矩和采用何種拓撲結構才能盡可能地減小轉矩波動成為研究重點方向之一。
(2) 直驅永磁電機磁場分析研究。直驅永磁電機的磁場分析方法直接影響所需參數的精確度,影響電機的性能。如何找到適合于直驅永磁電機,能夠得到準確的各種磁密以及各種磁場損耗的磁場分析法是直驅永磁電機研究熱點之一。
(3) 直驅永磁電機控制方法研究。直驅永磁電機控制需要較高的跟蹤能力,對參數變化和外界擾動具有較強的魯棒性,具有其他裝置無法比擬的優良性能、高精度和高加速度等優勢。直驅永磁電機控制技術目前以矢量控制技術和直接轉矩控制為主,無位置傳感控制技術為輔,可以說是相當成熟。但是系統相對復雜,控制起來非常不方便。如何找到一種控制過程簡單的控制方法取代那些復雜的系統是直驅永磁電機研究方向和重點之一。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
建材發展導向(2019年13期)2019-08-24 06:37:40
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2019年7期)2019-04-25 13:16:50
上海大中型電機(2017年4期)2017-02-06 05:27:06
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
照明工程學報(2016年3期)2016-06-01 12:17:56
現代企業(2015年9期)2015-02-28 18:56:50
電測與儀表(2014年1期)2014-04-04 12:00:32
