玉米精量播種智能控制系統研制
2018-08-10 10:58:08楊騰祥金誠謙
農機化研究 2018年9期
關鍵詞:作業
印 祥,楊騰祥,金誠謙,杜 娟
(山東理工大學 農業工程與食品科學學院,山東 淄博 255000)
0 引言
隨著精準農業和智慧農業等概念的提出和實施,農業生產要求在減少農業生產資料投入的同時提高產出[1]。其中,播種作業是影響投入產出比的關鍵環節之一,而玉米播種作業要求每穴一粒、粒距均勻一致[2-5]。目前,玉米播種機大都采用地輪驅動排種器的方式,通過改變其機械傳動機構的傳動比以調節播種粒距[6-8]。而由于田間地面起伏不平、地輪打滑等因素,導致播種粒距隨機變化,很大程度上影響玉米產量[9-11]。此外,機械傳動機構的傳動比為固定值,不能實現播種粒距的在線無級調節。
本文針對現有玉米播種機存在的問題,基于機電一體化控制技術,研制了基于調速電機驅動的玉米精量播種智能控制系統。
1 系統構成
以市場上現有的四行玉米免耕精量播種機為平臺,結合當前國內外精量播種控制系統的研究現狀,研制了如圖1所示的玉米精量播種智能控制系統。其主要包括可調速直流電機、人機交互界面、測速地輪、光電編碼器,以及電子控制單元(ECU)等。ECU根據測速地輪轉速實時計算播種機行駛速度,并根據行駛速度對直流電機進行調速以驅動排種器完成排種作業。人機交互終端用以設置播種機基本作業參數,主要包括測速地輪直徑、播種粒距和排種器型孔數,同時用以實時顯示系統工作狀態。
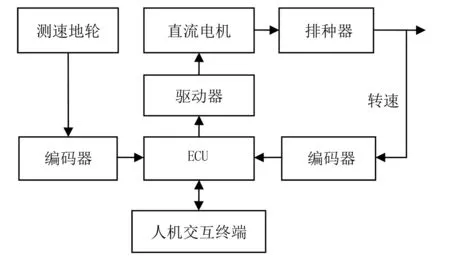
圖1 玉米精量播種智能控制系統構成
2 硬件系統設計
2.1 ECU電路設計
ECU作為玉米精量播種智能控制系統的核心,用以接收兩路編碼器的脈沖信號、控制直流電機轉速及與人機交互終端進行實時通信。根據上述系統功能要求,本研究選用了PIC18F458單片機為中央處理器,外圍電路主要包括時鐘電路、1個串口驅動芯片MAX232、2個脈沖計數器CD4040、1個D/A轉換芯片MAX518等。ECU電路原理框圖如圖2所示。
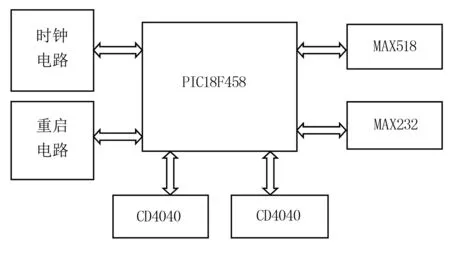
圖2 ECU電路原理框圖
2.2 地輪測速
與驅動地輪不同,本研究中所采用的地輪僅用于播種機行駛速度測量,打滑率相對較小。如圖3所示:采用600線光電編碼器1,其輸入軸與測速地輪聯接,由ECU實時計算播種機前進速度(m/s),即
(1)
其中,D為測速地輪直徑;△T為間隔時間;P為△T時間內的脈沖數量;N為編碼器線數。

1.編碼器 2.測速地輪 3.排種器 4.減速電機 5.種箱 6.機架 7.鏈傳動 8.編碼器
2.3 排種器轉速控制
在播種機前進速度恒定的條件下,排種器的轉速直接決定了入土種子的數量。如圖3所示:直流減速電機為24V、300W,最高轉速為100r/min,其輸出動力經過鏈條鏈輪傳動機構傳遞至排種器。排種器目標轉速由ECU實時計算,其公式為
(2)
其中,dD為設定播種間距;M為排種盤型孔數量。
編碼器與排種器旋轉軸聯接,用以測量排種器實際轉速SA,ECU根據SA和SD,基于比例微分算法實時調整驅動器的輸入電壓值VD以控制電機轉速,保證播種粒距均勻一致。VD計算公式為
(3)
(4)

2.4 軟件設計
根據精量播種的基本作業要求,所開發的ECU工作流程如圖4所示。系統初始化后,首先讀取作業參數,然后讀取播種機前進速度V后計算SD,讀取SA后計算VD,最后利用人機交互終端顯示實時作業狀態。
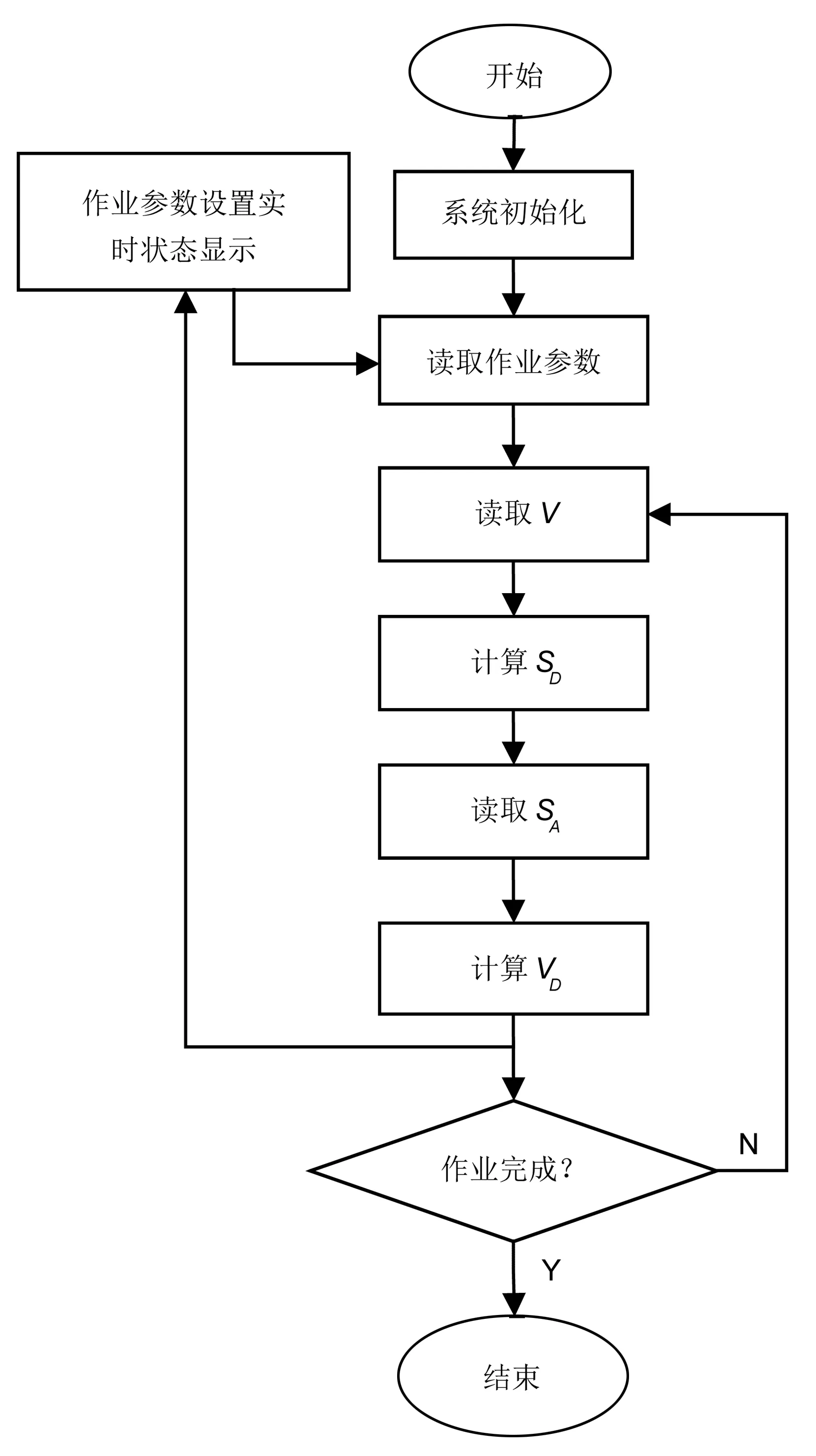
圖4 ECU工作流程圖
根據圖4所示工作流程,本研究在基于C語言的PIC單片機編程環境下完成了ECU軟件編寫,利用PICkit3編程器進行了程序下載和測試。
2.5 人機交互終端設計
為便于系統操作和狀態顯示,本研究采用串口HMI觸摸屏作為人機交互終端,觸摸屏通過RS232串口與ECU進行通信。根據精量播種機智能控制系統操作要求,需要設置的基本參數包括排種盤型孔數量M、地輪直徑D、編碼器線數N、播種粒距dD,需要實時顯示的作業狀態參數包括播種機前進速度V、排種器目標轉速SD、排種器實際轉速SA及實際粒距dA。
利用串口HMI觸摸屏的開發環境,完成了基本參數設置界面和作業參數實時顯示界面的設計和制作,如圖5所示。

(a) 參數設置界面
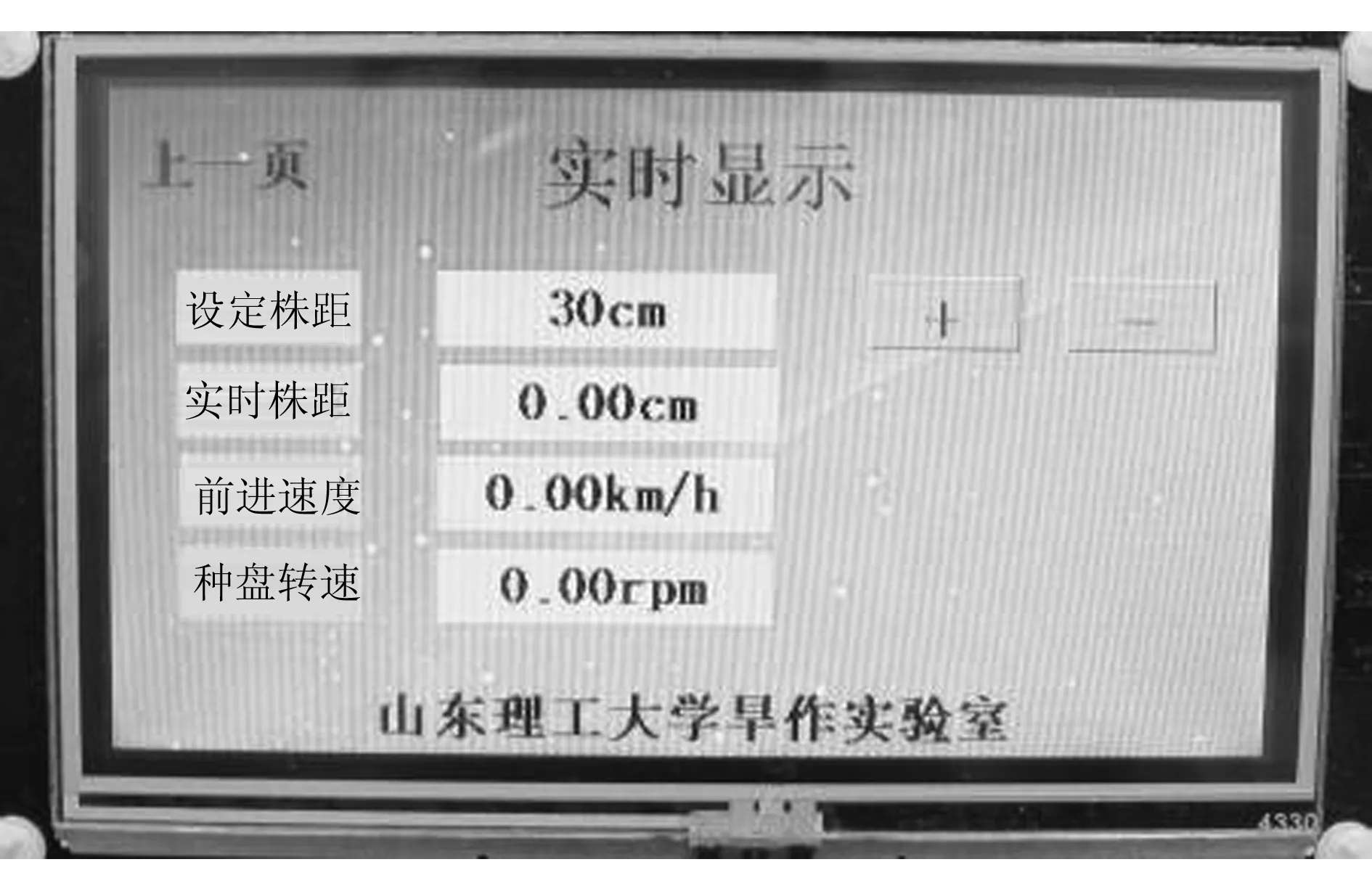
(b) 實時顯示界面
3 測試試驗與數據分析
為了評價該精量播種智能控制系統的工作性能,將其用于指夾式排種器上,排種盤的指夾數量為12。如圖6所示:將此裝置安裝于排種試驗臺上,以驗證其在不同前進速度、不同播種粒距時排種的可靠性和準確性,試驗安排如下:
1)試驗時間。2017年3月21-25日。
2)試驗地點。山東理工大學農機性能實驗室。
3)試驗平臺。計算機視覺排種器試驗臺,黑龍江省農業機械工程科學研究院研制,如圖6所示。
4)試驗對象。所研制的玉米精量播種智能控制系統。
試驗過程中,通過改變輸送帶行走速度的方式模擬播種機的不同前進速度。考慮到所使用的指夾式排種器的推薦作業速度為5.0km/h,試驗中擬設定的前進速度為3.0、4.0、5.0、6.0、7.0km/h,在同一前進速度下所設定的播種粒距分別為30、35、40cm。系統運行過程中,ECU通過RS232串口將前進速度V、目標轉速SD、實際轉速SA等計算數據實時發送計算機。如圖7所示,實際播種粒距dA由人工進行測量,同一前進和同一設定粒距下的試驗重復3次,忽略重播、漏播等因素的影響。

1.指夾式排種器 2.安裝支架 3.種箱 4.減速電機
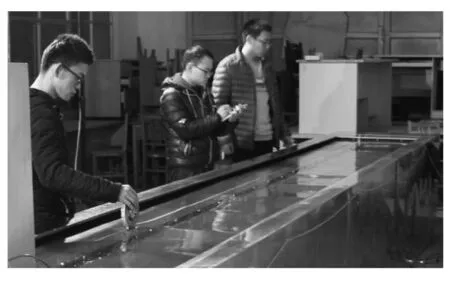
圖7 粒距測量
由表1可以看出:播種間距實際平均值與目標間距的差值均小于2cm,播種間距誤差的最大值為12cm,其均方根誤差的最大值為0.84cm。在前進速度5.05km/h時,即排種器轉速在20r/min左右時,播種間距的均方根誤差和最大誤差均較小,符合所使用的指夾式排種器的推薦播種速度。上述試驗數據表明:本研究所開發的玉米精量播種控制系統能夠根據播種機前進速度實時控制排種器轉速,以滿足播種粒距一致的要求。

表1 試驗數據與分析
4 結論
1)研制了玉米精量播種智能控制系統,能夠根據播種機前進速度實時控制排種器轉速以保證播種粒距一致。
2)該系統采用直流減速電機驅動排種器,機械結構簡單,可以在現有玉米播種機的基礎上進行快速改造,從而滿足玉米精量播種的要求。
3)該系統采用串口屏作為人機交互界面,能夠在線設置系統作業參數,可適用于不同作業參數的玉米播種機。
4)試驗表明:該系統操作簡單,在機器基本參數一定的情況下只需輸入播種間距,ECU即可自動控制排種器轉速,不同前進速度下播種間距的平均誤差小于2cm。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
