考慮零控?cái)r截的中制導(dǎo)最優(yōu)彈道修正
2018-08-29 08:14:46周覲雷虎民
兵工學(xué)報(bào) 2018年8期
關(guān)鍵詞:方法
周覲, 雷虎民
(空軍工程大學(xué) 防空反導(dǎo)學(xué)院, 陜西 西安 710051)
0 引言
臨近空間高超聲速武器是以高超聲速飛行器為載體或直接作為武器本體使用,長時(shí)間在臨近空間飛行的武器,具有作戰(zhàn)空間大、飛行速度快、突防能力強(qiáng)以及毀傷力大等特點(diǎn),能突破目前幾乎所有的防御體系,對(duì)我國空天防御作戰(zhàn)提出了極大的挑戰(zhàn),開展臨近空間防御作戰(zhàn)研究已迫在眉睫[1-2]。現(xiàn)有武器系統(tǒng)在應(yīng)對(duì)臨近空間高超聲速武器作戰(zhàn)環(huán)境下面臨的主要挑戰(zhàn)可歸結(jié)為:1)臨近空間高超聲速武器具有較高的飛行速度,導(dǎo)致防御方攔截窗口較小,可攔截條件轉(zhuǎn)瞬即逝[3]。尤其在攔截末段,末制導(dǎo)時(shí)間很短,供攔截彈的調(diào)整修正時(shí)間有限,因此攔截彈在中制導(dǎo)和末制導(dǎo)交接班時(shí)必須處于較好的攔截態(tài)勢(shì)[4],否則難以成功命中目標(biāo);2)現(xiàn)有武器系統(tǒng)的中制導(dǎo)段大多采用比例導(dǎo)引[5]或彈道成型等制導(dǎo)律[6],對(duì)于最優(yōu)彈道設(shè)計(jì)以及最優(yōu)化的彈道修正等問題考慮較少。在臨近空間防御作戰(zhàn)環(huán)境下,由于非合作目標(biāo)的機(jī)動(dòng)及目標(biāo)周圍等離子鞘套干擾等帶來的影響,目標(biāo)實(shí)際飛行狀態(tài)很難精確獲得,對(duì)于目標(biāo)的預(yù)測(cè)運(yùn)動(dòng)狀態(tài)也需進(jìn)行持續(xù)更新[7],這就要求攔截彈在實(shí)際飛行作戰(zhàn)過程中適時(shí)修正自身彈道,滿足目標(biāo)信息更新后的最佳攔截條件。
綜合考慮以上兩點(diǎn)的相關(guān)文獻(xiàn)研究較少。作為中制導(dǎo)的終端條件以及末制導(dǎo)的初始條件,中制導(dǎo)和末制導(dǎo)交接班時(shí)攔截彈的狀態(tài)至關(guān)重要[3]。為有效設(shè)定中制導(dǎo)和末制導(dǎo)的最佳交接條件,鄭立偉等[8]針對(duì)大氣層外中段攔截問題,推導(dǎo)得到了一種考慮飛行器重力差影響的零控脫靶量關(guān)系式,宋劍爽等[9]提出了廣義零控?cái)r截流型的概念,張浩強(qiáng)等[4]研究了考慮臨近空間零控交班條件的指令修正中制導(dǎo)設(shè)計(jì),得出了連接中制導(dǎo)和末制導(dǎo)階段的有效零控?cái)r截交班區(qū)域。這些研究為中制導(dǎo)和末制導(dǎo)交接班時(shí)刻的攔截彈狀態(tài)約束建立提供了有力借鑒。中制導(dǎo)段的彈道修正思路主要分為兩類[10-12]:1)利用高效的優(yōu)化算法將當(dāng)前狀態(tài)與約束狀態(tài)作為邊值條件,對(duì)彈道進(jìn)行重新優(yōu)化,如偽譜法[13]、粒子群方法[14]等。由于需要在線求解最優(yōu)化問題,這種思路的主要缺點(diǎn)是對(duì)算法的求解精度以及求解效率提出了較高要求;2)將改變后的約束條件作為基準(zhǔn)狀態(tài)的擾動(dòng),利用線性化方法求解所需的控制量補(bǔ)償量,如文獻(xiàn)[15-18]研究并提出的模型靜態(tài)預(yù)測(cè)規(guī)劃算法。通過對(duì)系統(tǒng)的狀態(tài)偏差方程進(jìn)行1階泰勒級(jí)數(shù)展開,將終端的狀態(tài)約束偏差表示成為偏微分方程的連乘積形式,然后采用迭代優(yōu)化的方法對(duì)控制量進(jìn)行修正。但是模型靜態(tài)預(yù)測(cè)規(guī)劃算法的迭代次數(shù)及迭代精度都未能得到有效理論證明,因此其在線適用能力無法得到保證。Pontani等[10-12]應(yīng)用鄰域最優(yōu)控制理論研究了月球飛行器的軌道修正問題,設(shè)計(jì)了一種鄰域最優(yōu)化制導(dǎo)算法。該算法將終端狀態(tài)修正量作為反饋代入到基準(zhǔn)彈道的哈密爾頓方程及狀態(tài)方程,通過一次性求解即可得到基準(zhǔn)控制量的最優(yōu)補(bǔ)償量。以上思路充分利用了基準(zhǔn)彈道信息,避免了對(duì)于控制量的再次大范圍尋優(yōu),因而一般時(shí)效性較高。
本文針對(duì)臨近空間防御作戰(zhàn)中面臨的交班條件和彈道修正兩方面挑戰(zhàn),提出了一種最優(yōu)化的中制導(dǎo)彈道修正算法。
1 中制導(dǎo)和末制導(dǎo)交接班的零控?cái)r截條件分析
1.1 末制導(dǎo)段攔截彈和目標(biāo)運(yùn)動(dòng)分析
為敘述方便,首先引入如下假設(shè)條件:
假設(shè)1攔截彈的彈上導(dǎo)引頭最大作用距離為Rmax,忽略中制導(dǎo)和末制導(dǎo)交接班中的導(dǎo)引頭開機(jī)搜索與目標(biāo)截獲過程,認(rèn)為只要攔截彈與目標(biāo)之間的距離小于Rmax,導(dǎo)引頭即可成功截獲目標(biāo),中制導(dǎo)和末制導(dǎo)交接班結(jié)束并順利轉(zhuǎn)入末制導(dǎo)階段。
假設(shè)2考慮臨近空間目標(biāo)的典型特點(diǎn),認(rèn)為在中制導(dǎo)和末制導(dǎo)交接班以及末制導(dǎo)階段,目標(biāo)速度大于攔截彈速度,即目標(biāo)與攔截彈的速度比Δ=‖vT‖/‖vM‖>1成立。
假設(shè)3考慮目標(biāo)和攔截彈較大的相對(duì)運(yùn)動(dòng)速度,認(rèn)為在末制導(dǎo)階段目標(biāo)不機(jī)動(dòng),攔截彈的過載指令只改變速度方向。
末制導(dǎo)階段垂直平面內(nèi)攔截彈和目標(biāo)的相對(duì)運(yùn)動(dòng)關(guān)系如圖1所示。
圖1中:OXZ為慣性參考坐標(biāo)系;攔截彈M和目標(biāo)T之間的連線稱為視線(LOS);R為M和T之間的距離;vM、vT和aM、aT分別為速度矢量和加速度矢量;θ為相應(yīng)速度矢量與水平面之間的夾角,即彈道傾角;qLOS為LOS與水平面之間的夾角,即LOS角;γ為攔截彈速度矢量與LOS之間的夾角,η為目標(biāo)速度矢量與LOS之間的夾角,γ和η均為速度前置角。由圖1可得到以下運(yùn)動(dòng)方程:
(1)
(2)
(3)
γ=θM-qLOS,
(4)
(5)
(6)
(7)
η=qLOS-θT,
(8)
(9)
(10)
式中:(XM,ZM)和(XT,ZT)分別為攔截彈和目標(biāo)在OXZ坐標(biāo)系中的位置。
結(jié)合假設(shè)3可得到aT=0,則(7)式可進(jìn)一步簡化為
(11)
1.2 中制導(dǎo)和末制導(dǎo)交接班零控?cái)r截條件分析
定理1假設(shè)目標(biāo)不機(jī)動(dòng),目標(biāo)和攔截彈的速度比Δ=‖vT‖/‖vM‖>1,那么在中制導(dǎo)和末制導(dǎo)交接班過程中攔截彈和目標(biāo)存在零控?cái)r截條件,并且此條件由目標(biāo)和攔截彈的速度比及二者的速度矢量分別與LOS之間的夾角,即二者各自的速度前置角,唯一確定。
證明為便于零控?cái)r截條件的分析與證明,對(duì)圖 1作進(jìn)一步變形,以目標(biāo)速度矢量的終點(diǎn)O′作為圓心,以攔截彈速度矢量vM的模值‖vM‖為半徑作圓,與彈目LOS分別相交于A點(diǎn)和B點(diǎn),如圖2所示。如果攔截彈速度矢量ME滿足ME=BO′(或ME=AO′,證明過程相同),那么攔截彈和目標(biāo)即滿足零控?cái)r截條件。
通過圓心O′做垂線與LOS相交于G點(diǎn),那么在△AO′B可得
‖O′G‖=‖vM‖sinγ=‖vT‖sinη,
(12)
sinγ=Δsinη.
(13)
將(12)式代入(10)式可得
(14)
由(13)式進(jìn)一步推導(dǎo)可得
(15)
將(15)式代入(9)式并進(jìn)行化簡可得
(16)
根據(jù)假設(shè)2中目標(biāo)和攔截彈的速度比Δ=‖vT‖/‖vM‖>1,由(16)式可知:
(17)
綜合(14)式及(17)式可得,如果目標(biāo)不機(jī)動(dòng),且目標(biāo)和攔截彈的速度比Δ=‖vT‖/‖vM‖>1,那么攔截彈無需施加額外的制導(dǎo)指令即可成功攔截目標(biāo),即攔截彈和目標(biāo)滿足零控?cái)r截條件,此條件由(13)式唯一確定。
進(jìn)一步觀察圖2可發(fā)現(xiàn),零控?cái)r截邊界條件為LOS與攔截彈速度矢量圓相切的情形,假設(shè)切點(diǎn)分別為C點(diǎn)和D點(diǎn),此時(shí)有
γ=±π/2 rad.
(18)
將(18)式代入(13)式可得
ηmax=arcsin(1/Δ),
(19)
從而可得目標(biāo)的速度前置角η取值范圍為
-ηmax≤η≤ηmax.
(20)


2 中制導(dǎo)最優(yōu)彈道修正算法
2.1 中制導(dǎo)段攔截彈運(yùn)動(dòng)模型
攔截彈在攔截高速目標(biāo)作戰(zhàn)中,通常選擇高拋再入攔截彈道,即在有動(dòng)力階段快速爬升穿過底層稠密大氣層,而后在無動(dòng)力階段從高空再入打擊[19]。這樣既可有效節(jié)省能量,又有利于彈上導(dǎo)引頭更好地探測(cè)及捕獲目標(biāo)[3]。由于有動(dòng)力階段的彈道設(shè)計(jì)目標(biāo)主要是合適的關(guān)機(jī)點(diǎn)高度及關(guān)機(jī)點(diǎn)速度,而無動(dòng)力階段主要考慮目標(biāo)機(jī)動(dòng)情況下的彈道優(yōu)化及修正,所以本文選擇無動(dòng)力階段為主要研究對(duì)象,攔截彈數(shù)學(xué)模型[20]可表示為
(21)
(22)
(23)
(24)
(25)
(26)
式中:(x,y,z)為攔截彈在地面坐標(biāo)系中的位置;v為攔截彈速度;ψ為彈道偏角;re為地球半徑;g為重力加速度;m為攔截彈質(zhì)量;q為動(dòng)壓;S為攔截彈參考面積;β為側(cè)滑角;CL和CD分別為升力系數(shù)和阻力系數(shù)。
為保證攔截彈的直接碰撞殺傷效果,一般以中制導(dǎo)結(jié)束時(shí)刻的速度最大作為優(yōu)化指標(biāo):
J=φ(x(tf),tf)=-vf,
(27)
式中:tf為中制導(dǎo)結(jié)束時(shí)間;vf為中制導(dǎo)結(jié)束時(shí)刻的速度。
結(jié)合第1節(jié)分析可知,中制導(dǎo)段應(yīng)確保在中末制導(dǎo)交接班時(shí)刻攔截彈處于零控?cái)r截條件,包括中制導(dǎo)終端位置約束及角度約束條件,即
(28)
式中:ψf為中制導(dǎo)結(jié)束時(shí)刻的彈道偏角;下標(biāo)d為相應(yīng)狀態(tài)量的期望值。
過程約束主要考慮攔截彈的熱流密度Q不超過材料所能承受的最大值Qmax=2.5×105W/m2,即
(29)
式中:qa0、qa1、qa2、qa3為熱流密度系數(shù);ρ為空氣密度:α為攔截彈攻角。
參考文獻(xiàn)[20]中對(duì)控制量的限制,同時(shí)結(jié)合攔截彈實(shí)際特點(diǎn),本文中控制量約束設(shè)定為
(30)
2.2 中制導(dǎo)最優(yōu)彈道修正

(31)
(32)

(33)
(34)
ψf(x(tf))=0,
(35)
在攔截彈中制導(dǎo)段,由于目標(biāo)機(jī)動(dòng)或?qū)τ谀繕?biāo)預(yù)測(cè)信息的更新,中制導(dǎo)和末制導(dǎo)交接班時(shí)刻攔截彈和目標(biāo)的運(yùn)動(dòng)狀態(tài)將發(fā)生改變,從而不滿足預(yù)先設(shè)計(jì)的零控?cái)r截條件。這時(shí)就需根據(jù)目標(biāo)信息對(duì)中制導(dǎo)和末制導(dǎo)交接班時(shí)刻攔截彈的狀態(tài)約束進(jìn)行調(diào)整。記預(yù)先設(shè)計(jì)的基準(zhǔn)約束條件為ψ*,根據(jù)目標(biāo)預(yù)測(cè)信息修正后的終端約束條件為ψ,則終端約束的修正量為δψf=ψ-ψ*. 中制導(dǎo)段的最優(yōu)彈道修正可以表述為:當(dāng)中制導(dǎo)終端約束條件發(fā)生改變時(shí),通過對(duì)原有的基準(zhǔn)控制量u*進(jìn)行一定的補(bǔ)償δu得到修正控制量u=δu+u*,從而對(duì)攔截彈的基準(zhǔn)狀態(tài)量x*進(jìn)行調(diào)整δx=x-x*,使x滿足改變后的終端約束條件ψ,并且在一定程度上保持性能指標(biāo)J的最優(yōu)性。
中制導(dǎo)段的最優(yōu)彈道修正可以看作基準(zhǔn)彈道狀態(tài)上的擾動(dòng),對(duì)于最優(yōu)控制條件(33)式及橫截條件進(jìn)行進(jìn)一步微分可得
(36)
(37)
(38)
式中:dν為終端乘子的調(diào)整量,dν=ν-ν*. 如果?2H/?u2非奇異,那么根據(jù)(36)式可得到控制量的修正量δu表達(dá)式為
(39)
對(duì)狀態(tài)方程(31)式及協(xié)態(tài)方程(32)式在基準(zhǔn)彈道附近進(jìn)行線性化,并將(39)式代入可得
(40)
(41)
式中:
(42)
(43)
(44)
觀察(37)式和(38)式可發(fā)現(xiàn),偏微分后中制導(dǎo)和末制導(dǎo)交接班時(shí)刻協(xié)態(tài)的修正量δλ(tf)和終端約束的修正量δψf表示成為了關(guān)于狀態(tài)修正量δx和終端乘子修正量dν的線性表達(dá)式:
δλ(tf)=[S(t)δx(t)+R(t)dν]f,
(45)
δψf=[RT(t)δx(t)+Q(t)dν]f,
(46)
式中:S(t)、R(t)、Q(t)為引入的時(shí)變矩陣,且滿足[10-12]:
(47)
(48)
Qf=0,
(49)
(50)
(51)
(52)
以時(shí)變矩陣S(t)、R(t)、Q(t)的終端條件(47)式~(49)式為初值,以(50)式~(52)式為系統(tǒng)方程進(jìn)行逆向積分,可得到dν在初始時(shí)刻的表達(dá)式為
(53)
將(53)式代入(45)式,可得到初始時(shí)刻的協(xié)態(tài)變量偏差量
δλ0=[(S-RQ-1RT)δx+RQ-1δψf]0.
(54)
通過觀察(54)式可看出,協(xié)態(tài)量的偏差量δλ表示成初始時(shí)刻狀態(tài)偏差量δx及終端約束偏差量δψf的表達(dá)式,而δx和δψf都可通過攔截彈上的敏感測(cè)量裝置或地面探測(cè)設(shè)備解算得到,從而確保了最優(yōu)彈道修正算法的可實(shí)現(xiàn)性。由于最優(yōu)彈道修正算法對(duì)基準(zhǔn)彈道所滿足的1階最優(yōu)性條件公式(31)式~(35)式進(jìn)行2階變分得到,具有2階最優(yōu)性[10]。利用(39)式進(jìn)行一次求解即可得到最優(yōu)修正量δu,避免了偽譜法中對(duì)控制量的再次大范圍尋優(yōu)求解TPBVP以及模型靜態(tài)預(yù)測(cè)規(guī)劃中對(duì)控制量的迭代更新,所以具有更高的求解精度以及求解效率。
綜上所述,考慮零控?cái)r截的中制導(dǎo)最優(yōu)彈道修正算法步驟如下:
步驟1根據(jù)預(yù)警系統(tǒng)得到的目標(biāo)運(yùn)動(dòng)信息以及攔截彈中制導(dǎo)和末制導(dǎo)交接班時(shí)刻預(yù)設(shè)運(yùn)動(dòng)狀態(tài),結(jié)合(13)式判斷是否滿足零控?cái)r截條件。如果滿足,則繼續(xù)保持對(duì)目標(biāo)跟蹤預(yù)測(cè),重復(fù)步驟1;如果不滿足,則進(jìn)入步驟2.

步驟3利用(47)式~(49)式計(jì)算矩陣Sf、Rf和Qf,將其作為初始值代入到狀態(tài)方程(50)式~(52)式進(jìn)行逆向積分至初始時(shí)刻t0得到S0、R0和Q0.
步驟4將S0、R0、Q0、δx0和δψf代入(53)式和(54)式,得到dν和δλ0的值。
步驟5將初始時(shí)刻狀態(tài)量的偏差量δx0和協(xié)態(tài)量的偏差量δλ0代入(40)式和(41)式進(jìn)行積分,得到δx(t)和δλ(t)后代入(39)式,計(jì)算控制量的補(bǔ)償量δu(t).
步驟6將控制量的補(bǔ)償量δu(t)與基準(zhǔn)控制量相加得到更新的控制量u(t)=δu(t)+u*(t)并以此為控制指令代入到攔截彈狀態(tài)方程(21)式~(26)式,得到更新后的中制導(dǎo)和末制導(dǎo)交接班時(shí)刻攔截彈狀態(tài)ψ=δψf+ψ*,完成考慮零控?cái)r截的中制導(dǎo)最優(yōu)彈道修正,返回步驟1.
3 仿真結(jié)果與分析
為驗(yàn)證本文所設(shè)計(jì)方法的有效性,開展兩種情形的仿真,設(shè)定仿真中攔截彈導(dǎo)引頭最大作用距離Rmax=100 km,利用偽譜法[21]獲得仿真的基準(zhǔn)彈道,中制導(dǎo)過程中目標(biāo)在交接班時(shí)刻的狀態(tài)信息依靠遠(yuǎn)程預(yù)警系統(tǒng)或攔截彈的火控雷達(dá)預(yù)測(cè)得到。仿真平臺(tái)相關(guān)參數(shù)為:Intel Core i7 3.4 GHz處理器,4 G內(nèi)存,Windows XP x86操作系統(tǒng),偽譜法采用MATLAB程序包GPOPS,本文方法和模型靜態(tài)預(yù)測(cè)規(guī)劃方法采用MATLAB R2014a平臺(tái)編寫。
3.1 情形1
仿真中想定的攔截彈和目標(biāo)有關(guān)參數(shù)設(shè)置如表1所示。
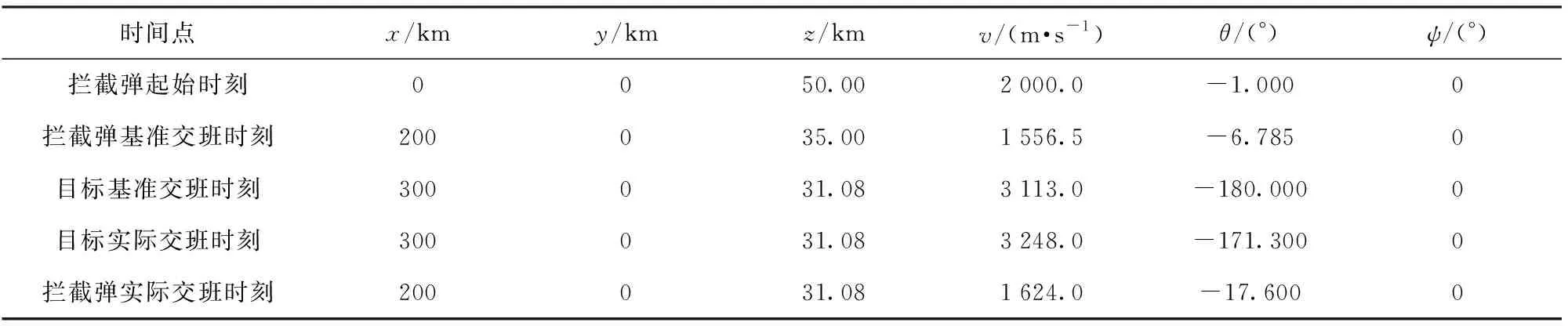
表1 情形1參數(shù)設(shè)置
此仿真情形設(shè)計(jì)的目的是檢驗(yàn)本文算法對(duì)中制導(dǎo)彈道修正的有效性。由表1可知,在非精確信息支援條件下,目標(biāo)在交接班時(shí)刻預(yù)測(cè)的飛行彈道傾角為-180°,此時(shí)設(shè)計(jì)的攔截彈基準(zhǔn)交接班時(shí)刻高度為35 km,彈道傾角為-6.785°,目標(biāo)和攔截彈的速度比為Δ=3 113.0/1 556.5=2,通過(10)式可計(jì)算驗(yàn)證,基準(zhǔn)彈道的最初設(shè)計(jì)滿足零控?cái)r截條件。隨著攔截過程的進(jìn)行及目標(biāo)探測(cè)精度的提高,對(duì)中制導(dǎo)和末制導(dǎo)交接班時(shí)刻目標(biāo)的預(yù)測(cè)狀態(tài)也將進(jìn)行更新,更新后的目標(biāo)實(shí)際交接班時(shí)刻彈道傾角為-171.3°,速度為3 248 m/s,則此時(shí)要求攔截彈在中制導(dǎo)階段進(jìn)行最優(yōu)彈道修正,滿足目標(biāo)狀態(tài)更新后的零控?cái)r截條件。為進(jìn)一步體現(xiàn)本文算法的優(yōu)越性,將本文算法得到的結(jié)果與參考文獻(xiàn)[4]模型靜態(tài)預(yù)測(cè)規(guī)劃方法及偽譜法[21]重新優(yōu)化得到的結(jié)果進(jìn)行比較,如圖3~圖9所示。
圖3所示為情形1攔截彈彈道曲線。
由圖3可見,本文方法和偽譜法得到的修正彈道比較平滑,參考文獻(xiàn)[4]得到的修正彈道出現(xiàn)了一定跳躍。
圖4和圖5所示為情形1彈道傾角曲線和彈道偏角曲線。
由圖4和圖5可知,雖然3種方法都能將攔截彈的彈道傾角調(diào)整到約束狀態(tài)-17°附近,但本文方法和偽譜法得到的彈道傾角變化曲線要優(yōu)于參考文獻(xiàn)[4]得到的結(jié)果。由于參考文獻(xiàn)[4]得到的彈道傾角在傾角0°處發(fā)生了2次穿越,從而造成了圖3中攔截彈彈道的2次跳躍。由于目標(biāo)在側(cè)向y軸方向未發(fā)生機(jī)動(dòng),所以3種方法得到的修正彈道都能夠保持彈道偏角為0°,從而確保y軸方向位移為0 km.
圖6所示為情形1速度曲線。
由圖6可見,本文方法和偽譜法對(duì)于性能指標(biāo),即中制導(dǎo)和末制導(dǎo)交接班時(shí)刻速度大小能夠很好地保持其最優(yōu)性。
圖7和圖8所示為攔截彈攻角曲線和側(cè)滑角曲線。
由圖7和圖8可見,本文方法和偽譜法得到的控制量整體變化幅度比較小,優(yōu)于參考文獻(xiàn)[4]方法。
圖9所示為情形1攔截彈熱流密度變化曲線。
由圖9可知:參考文獻(xiàn)[4]方法得到的熱流密度峰值出現(xiàn)在55 s處,為198.5 kW/m2;本文方法和偽譜法得到的熱流密度峰值出現(xiàn)在終端時(shí)刻,分別為170.1 kW/m2和195.2 kW/m2;3種方法得到的熱流密度都沒有超過最大熱流密度限制,從而確保了飛行安全性。
3種方法得到的交接班時(shí)刻攔截彈狀態(tài)及時(shí)間消耗對(duì)比如表2所示。
由表2可知,3種方法都能將中制導(dǎo)和末制導(dǎo)交接班時(shí)刻攔截彈的彈道高度修正到目標(biāo)高度附近,從而確保此時(shí)LOS角qLOS≈0°,在x軸方向基本滿足彈上導(dǎo)引頭最大探測(cè)距離約束。本文算法得到的最終速度為1 624 m/s,偽譜法得到的最終速度為1 584 m/s,相對(duì)表1中基準(zhǔn)交接班時(shí)刻攔截彈速度1 556.5 m/s變化不大。但參考文獻(xiàn)[4]方法得到的速度為1 236 m/s,相比于基準(zhǔn)速度減小了320.5 m/s,原因在于參考文獻(xiàn)[4]方法是一種次優(yōu)化方法,并不能保證其求解指標(biāo)的最優(yōu)性[17]。通過計(jì)算可進(jìn)一步發(fā)現(xiàn),本文方法和偽譜法得到的目標(biāo)和攔截彈速度比Δ≈2,本文方法得到的修正后速度前置角γ=16.1°,參考文獻(xiàn)[4]方法及偽譜法得到的修正后速度前置角γ=17.7°,目標(biāo)的速度前置角為η=8.7°,根據(jù)(10)式可得本文方法和偽譜法的修正彈道基本滿足了零控?cái)r截條件。參考文獻(xiàn)[4]方法中目標(biāo)和攔截彈的速度比為Δ=2.67,并不滿足零控?cái)r截條件,原因在于零控?cái)r截條件與目標(biāo)和攔截彈的速度比及二者的速度前置角決定,參考文獻(xiàn)[4]方法雖能通過調(diào)整彈道及攔截彈角使其滿足速度前置角的約束,但對(duì)于速度性能指標(biāo)的影響不可預(yù)知,從而影響了目標(biāo)和攔截彈的速度比。

表2 情形1交班時(shí)刻攔截彈狀態(tài)與消耗時(shí)間對(duì)比
3.2 情形2
情形1驗(yàn)證了本文算法的最優(yōu)性和有效性,在仿真情形2中,通過多次更新中制導(dǎo)和末制導(dǎo)交接班時(shí)刻目標(biāo)預(yù)測(cè)運(yùn)動(dòng)狀態(tài),來檢驗(yàn)本文算法的多次彈道修正能力。作戰(zhàn)想定為:在開始時(shí)刻,保持情形1的目標(biāo)預(yù)測(cè)運(yùn)動(dòng)狀態(tài),攔截彈按照第1次修正后的彈道進(jìn)行飛行。在第40 s時(shí)刻,對(duì)目標(biāo)的預(yù)測(cè)狀態(tài)進(jìn)行更新,其運(yùn)行高度保持不變,側(cè)向位移為3 km,預(yù)測(cè)彈道傾角更新為-168.4°,如表3所示情形2參數(shù)設(shè)置。

表3 情形2參數(shù)設(shè)置
情形2的仿真結(jié)果如圖10~圖16所示,不同方法得到的交接班時(shí)刻攔截彈狀態(tài)與消耗時(shí)間如表4所示。
由圖10可見,修正后的彈道比較平滑。由表4可見,修正彈道基本都能達(dá)到中制導(dǎo)和末制導(dǎo)交接班約束的位置,其中偽譜法能夠很好地滿足終端約束,而參考文獻(xiàn)[4]方法與終端約束差別最大。原因在于偽譜法以當(dāng)前時(shí)刻狀態(tài)及終端狀態(tài)為約束對(duì)彈道進(jìn)行了再次優(yōu)化,優(yōu)化方法的精度較高。由于對(duì)當(dāng)前時(shí)刻的狀態(tài)量偏差dx定為0,但實(shí)際情況下在第2次彈道修正中與基準(zhǔn)彈道相比狀態(tài)已產(chǎn)生了調(diào)整,所以造成參考文獻(xiàn)[4]方法的假設(shè)條件不能很好滿足,得到的結(jié)果精度也會(huì)下降。由圖11和圖12可知,第1次修正和第2次修正后的攔截彈彈道傾角和彈道偏角都收斂到了不同的終端約束狀態(tài)。在40 s時(shí)刻第2次修正中,3種方法都能對(duì)彈道進(jìn)行有效調(diào)整,修正后的彈道傾角和偏角基本能收斂到-23°和0°附近。本文方法得到的彈道傾角為-21.7°,偏角為1.1°;參考文獻(xiàn)[4]方法得到的彈道傾角為-22.4°,偏角為0.2°;偽譜法得到的彈道傾角為-23.7°,偏角為0°. 由圖13可見,參考文獻(xiàn)[4]方法對(duì)速度影響較大,最后速度為1 183 m/s,本文方法得到的速度為1 507 m/s,偽譜法得到的速度為1 327 m/s. 結(jié)合(13)式可得到,本文方法與零控?cái)r截條件的偏差為-0.065,偽譜法偏差為-0.091,參考文獻(xiàn)[4]方法偏差為-0.172,本文方法得到的修正結(jié)果要優(yōu)于其他2種方法。由圖14和圖15可見,偽譜法控制量在最后時(shí)刻出現(xiàn)了震蕩,參考文獻(xiàn)[4]方法和本文方法得到的控制量曲線相對(duì)平滑。

表4 情形2交接班時(shí)刻狀態(tài)與消耗時(shí)間對(duì)比
由圖16可見,熱流密度維持在約束范圍之內(nèi)。從表4消耗時(shí)間對(duì)比可知,本文方法解算效率要高于其他2種方法,同時(shí)和情形1的耗時(shí)情況相比可知,由于中制導(dǎo)段剩余飛行時(shí)間的縮短,需解算的變量更少,情形2耗時(shí)更小。
4 結(jié)論
本文重點(diǎn)研究了考慮零控?cái)r截的中制導(dǎo)最優(yōu)彈道修正,通過分析攔截彈和目標(biāo)相對(duì)運(yùn)動(dòng)過程中存在的零控?cái)r截條件,建立了中制導(dǎo)和末制導(dǎo)交接班時(shí)刻攔截彈需要滿足的位置約束以及零控?cái)r截條件約束,利用最優(yōu)化理論推導(dǎo)設(shè)計(jì)了中制導(dǎo)段彈道的最優(yōu)修正算法。得到結(jié)論如下:
1)在攔截彈和目標(biāo)的相對(duì)運(yùn)動(dòng)過程中存在零控?cái)r截條件,此條件由目標(biāo)和攔截彈的速度比及二者速度矢量與LOS之間的夾角,即速度前置角,唯一確定。
2)以攔截彈彈上導(dǎo)引頭的最大作用距離作為中制導(dǎo)和末制導(dǎo)交接班時(shí)刻的攔截彈位置約束,以零控?cái)r截條件作為攔截彈彈道角度約束,能夠得到最佳的中制導(dǎo)和末制導(dǎo)交接班態(tài)勢(shì)。
3)當(dāng)中制導(dǎo)段對(duì)目標(biāo)的預(yù)測(cè)狀態(tài)不滿足零控?cái)r截條件時(shí),需要對(duì)攔截彈的彈道進(jìn)行修正。在確保性能指標(biāo)滿足一定的最優(yōu)性同時(shí),調(diào)整中制導(dǎo)和末制導(dǎo)交接班時(shí)刻攔截彈狀態(tài),確保滿足零控?cái)r截條件。
4)本文設(shè)計(jì)的最優(yōu)彈道修正算法相比參考文獻(xiàn)[4]中模型靜態(tài)預(yù)測(cè)規(guī)劃方法及偽譜法,具有較高的精度和較快的求解效率,適于在線彈道修正指令解算。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56