飛行器野外長時間熱待機狀態(tài)方位姿態(tài)研究
2018-08-30 06:02:52趙天承王春喜沙春哲
宇航計測技術 2018年4期
關鍵詞:系統(tǒng)
劉 凱 趙天承 張 捷 周 軍 王春喜 沙春哲
(1. 北京航天計量測試技術研究所,北京 100076;2. 北京宇航系統(tǒng)工程研究所,北京 100076;3. 中國運載火箭技術研究院,北京 100076)
1 引 言
隨著宇航技術的不斷發(fā)展,飛行器的種類越來越多,不同的飛行器在發(fā)射技術呈現(xiàn)出技術上的多種多樣。一些飛行器采用“水平瞄準”方式,通過慣性器件和光學基準傳遞為飛行器發(fā)射系統(tǒng)提供位置信息及發(fā)射基準方向。
在這種發(fā)射方式中,飛行器在野外水平瞄準后長時間水平待發(fā),期間飛行器方位姿態(tài)如果發(fā)生較大變化則會影響飛行器的導航及命中精度,因此對飛行器長時間熱待機狀態(tài)下的方位姿態(tài)變化進行監(jiān)測探究十分必要。
2 飛行器方位姿態(tài)長時間實時監(jiān)測系統(tǒng)
如圖1所示,監(jiān)測系統(tǒng)主要由光電自準直儀、經(jīng)緯儀、溫度巡檢儀和工業(yè)計算機組成。
本監(jiān)測系統(tǒng)采用光電經(jīng)緯儀和光電自準直儀相結合的方式進行,光電自準直儀完成對飛行器上瞄準棱鏡的實時監(jiān)測,為克服光電自準直儀自身的方位測量基準隨時間漂移,采用經(jīng)緯儀間隔相應時間對高精度自準直儀進行基準校準。
溫度巡檢儀完成對分布在飛行器不同位置的10個溫度傳感器的數(shù)據(jù)實時采集。系統(tǒng)采集角度數(shù)據(jù)和溫度數(shù)據(jù)通過串口實時上傳到工業(yè)計算機并儲存。

圖1 監(jiān)測系統(tǒng)組成原理圖Fig.1 Composition of monitoring and testing system
2.1 方位角導引法
本飛行器長時間熱待機狀態(tài)方位姿態(tài)探究采用“方位角導引法”[1]如圖2所示,該方法是依據(jù)已知方位角的某條測量線(基準邊),經(jīng)過多次測量儀器的對瞄與測角,導出所求線的方位角。其基本計算公式如下
(1)
式中:Aj——所求線的方位角,(°);A0——已知線的方位角,(°);βi——第i個傳遞角的實測值,(°);i——傳遞角的序號,從1至n,共n個傳遞角。

圖2 監(jiān)測系統(tǒng)采用方位角導引法原理示意圖Fig.2 Operation principle of monitoring and testing system used azimuth transfer
2.2 高精度光電自準直儀
高精度光電自準直儀利用自準直法對小角度范圍內被測反光鏡的微小轉動進行測量,通過光電探測器對角度偏轉信號進行采集,有測量自動化、精度高等優(yōu)點。
高精度光電自準直儀的物鏡筒上安裝有瞄準棱鏡,如圖3所示。使用經(jīng)緯儀和標桿儀建立相對測量基準邊,間隔一定時間使用經(jīng)緯儀觀測高精度光電自準直儀上瞄準棱鏡的方位姿態(tài)變化來對高精度光電自準直儀的光軸姿態(tài)進行修正。
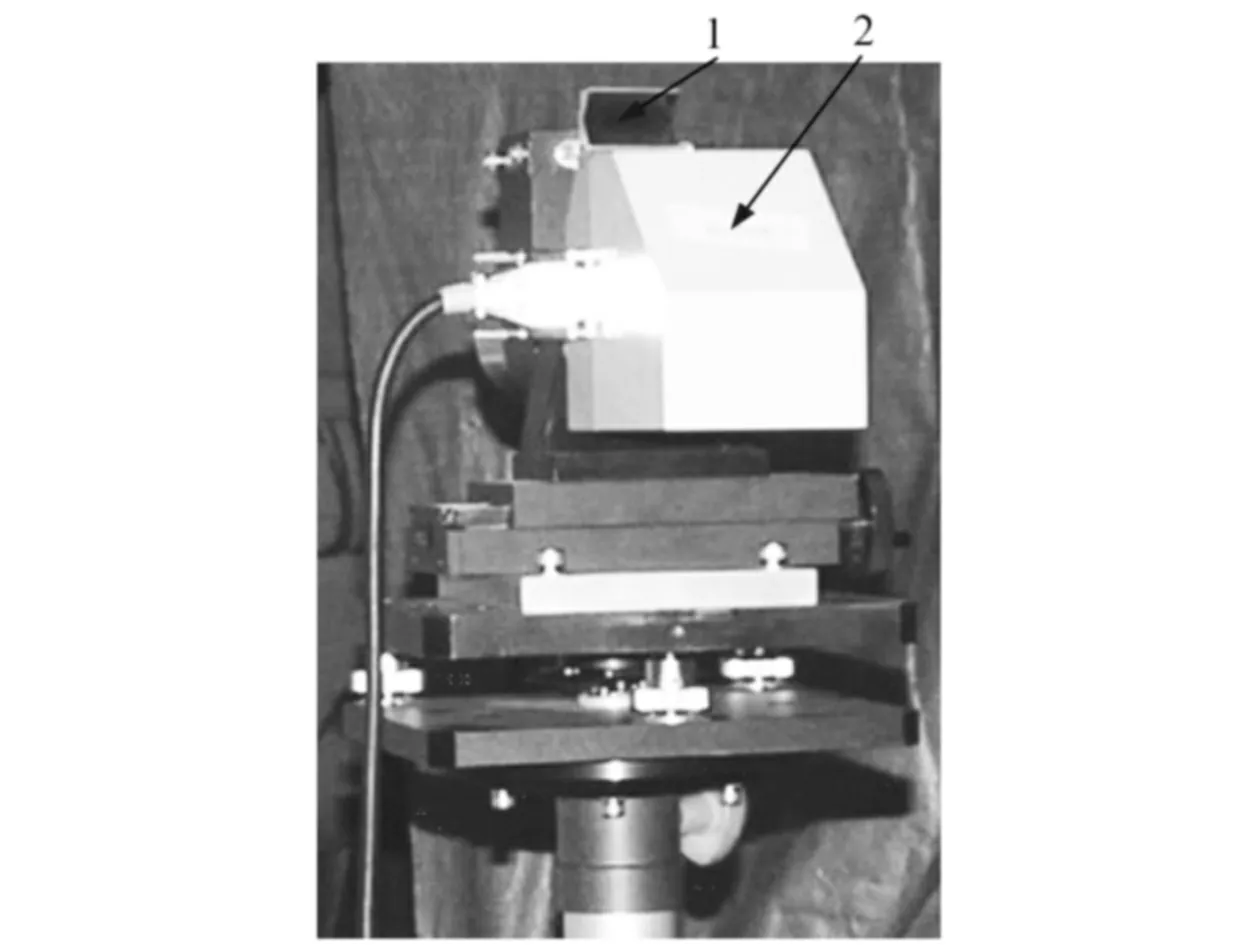
1-瞄準棱鏡;2-高精度光電自準直儀圖3 高精度光電自準直儀與瞄準棱鏡Fig.3 Operation principle of autocollimator
在利用外部基準對整機進行裝調及修正,光電信號經(jīng)過自適應采樣、滑動濾波等處理后,光電自準直儀可以克服元件非線性、環(huán)境雜散光、被測件擾動像等的影響,監(jiān)測系統(tǒng)在±1000″范圍內測角精度可達0.7″(1δ)。
2.3 經(jīng)緯儀
經(jīng)緯儀是大地測量的基本儀器,具有能適應野外測繪條件的特點[2],本監(jiān)測系統(tǒng)中電子經(jīng)緯儀采用旋轉光柵式測角系統(tǒng),有效的消減了分度元件的刻劃誤差,使經(jīng)緯儀的測角標準偏差達到0.5″[3]。
2.4 標桿儀
標桿儀與經(jīng)緯儀組合用于將地面上的地標點引出至地面的一定高度[4],方便經(jīng)緯儀的對準。在測量時,將在場坪地面上的兩點連線作為相對的方位基準邊;標桿儀和經(jīng)緯儀2的回轉中心分別與這兩點對齊,經(jīng)緯儀2對準標桿后即可將方位基準引出,經(jīng)緯儀1再將利用此基準觀測自準直儀的方位變化。如圖4所示為本監(jiān)測系統(tǒng)所用標桿儀,其對心誤差不大于0.5mm。

圖4 標桿儀Fig.4 Pole instrument
2.5 溫度測量模塊
根據(jù)以往測量經(jīng)驗,造成飛行器在水平狀態(tài)長時間熱待機時方位變化的主要影響因素可能是日照等環(huán)境因素造成的飛行器表面的溫度不均勻,因此使用溫度巡檢儀監(jiān)測飛行器表面溫度,其技術指標如表1,溫度巡檢儀可以同時采集10個溫度傳感器的測試數(shù)據(jù),傳感器布置如圖2所示。
溫度巡檢儀采用PT100熱電阻貼片溫度傳感器,配合溫度巡檢儀將溫度信號變送為數(shù)字信號輸出,傳輸距離遠、精度高。測量時使用專用黏結劑將傳感器固定在飛行器上。

表1 溫度巡檢儀主要技術指標
2.6 數(shù)據(jù)采集分析模塊
監(jiān)測系統(tǒng)在Visual C++ 6.0版本下開發(fā)實現(xiàn)。由于Visual C++擁有一個數(shù)據(jù)量大、功能齊全的MFC庫,該庫實現(xiàn)了對絕大多數(shù)Windows API的封裝。研發(fā)人員在Visua1 C++中既可以使用MFC完成絕大多數(shù)的編譯工作,同時也可以隨時調用windows API函數(shù)來完成深層次的開發(fā)[5]。除此之外,Visual C++在數(shù)據(jù)訪問、向導和Internet支持等方面增加了許多新功能,這些功能可以用來開發(fā)在Windows環(huán)境下的數(shù)據(jù)采集功能強大、圖形界面豐富的各類應用軟件系統(tǒng)。
監(jiān)測系統(tǒng)工業(yè)計算機對高精度光電自準直儀的實時數(shù)據(jù)進行采集和存儲,并且通過經(jīng)緯儀的串口通訊每隔30min對采集的高精度自準直儀數(shù)據(jù)進行修正。
溫度巡檢儀通過串口通訊接入工業(yè)計算機,完成監(jiān)測系統(tǒng)對于飛行器各個位置的溫度變化的監(jiān)測,并與高精度光電自準直儀的數(shù)據(jù)同步采集,用來實現(xiàn)不同物理量的多維分析。
監(jiān)測系統(tǒng)數(shù)據(jù)采集頻率設置為1Hz,可以完成11小時不間斷長時間的多維度數(shù)據(jù)采集,并將數(shù)據(jù)存儲在工業(yè)計算機硬盤中,長時間監(jiān)測試驗結束后,可以根據(jù)采集數(shù)據(jù)完成數(shù)據(jù)分析。
3 采集數(shù)據(jù)處理分析
某飛行器長時間熱待機狀態(tài)姿態(tài)監(jiān)測從下午14:26到第二天00:26之間進行,本時間段溫度變化較大,過程中全程記錄飛行器方位姿態(tài)、飛行器各處的溫度變化數(shù)據(jù)。
為盡量減小日照、風等野外環(huán)境對高精度光電自準直儀和經(jīng)緯儀的精度影響,高精度光電自準直儀和經(jīng)緯儀等測角設備被安置在遮陽、避風的帳篷或者車間內。
監(jiān)測系統(tǒng)采集的數(shù)據(jù)采用Origin 8.0軟件進行數(shù)據(jù)分析和函數(shù)回歸擬合,Origin 8.0提供了強大的線性回歸和函數(shù)擬合功能,其中最有代表性的是線性回歸和非線性最小平方擬合[6]。常用領域是數(shù)據(jù)分析以及繪圖數(shù)據(jù)分析包括數(shù)據(jù)的排序、調整、計算、統(tǒng)計、頻譜變換、曲線擬合等,本次試驗的數(shù)據(jù)處理采用最小二乘法線性回歸擬合。
如圖5所示,根據(jù)溫度巡檢儀的實時監(jiān)測, 12日下午14時26分至13日0時26分飛行器表面各部分溫度由30℃逐漸減低至-5℃,18時之間降溫幅度較大,之后變化平緩。
由于監(jiān)測系統(tǒng)采集數(shù)據(jù)量較大、測試環(huán)境惡劣,本論文數(shù)據(jù)處理采用Savitzky-Golay光滑濾波,并設置平滑數(shù)據(jù)點為1000。
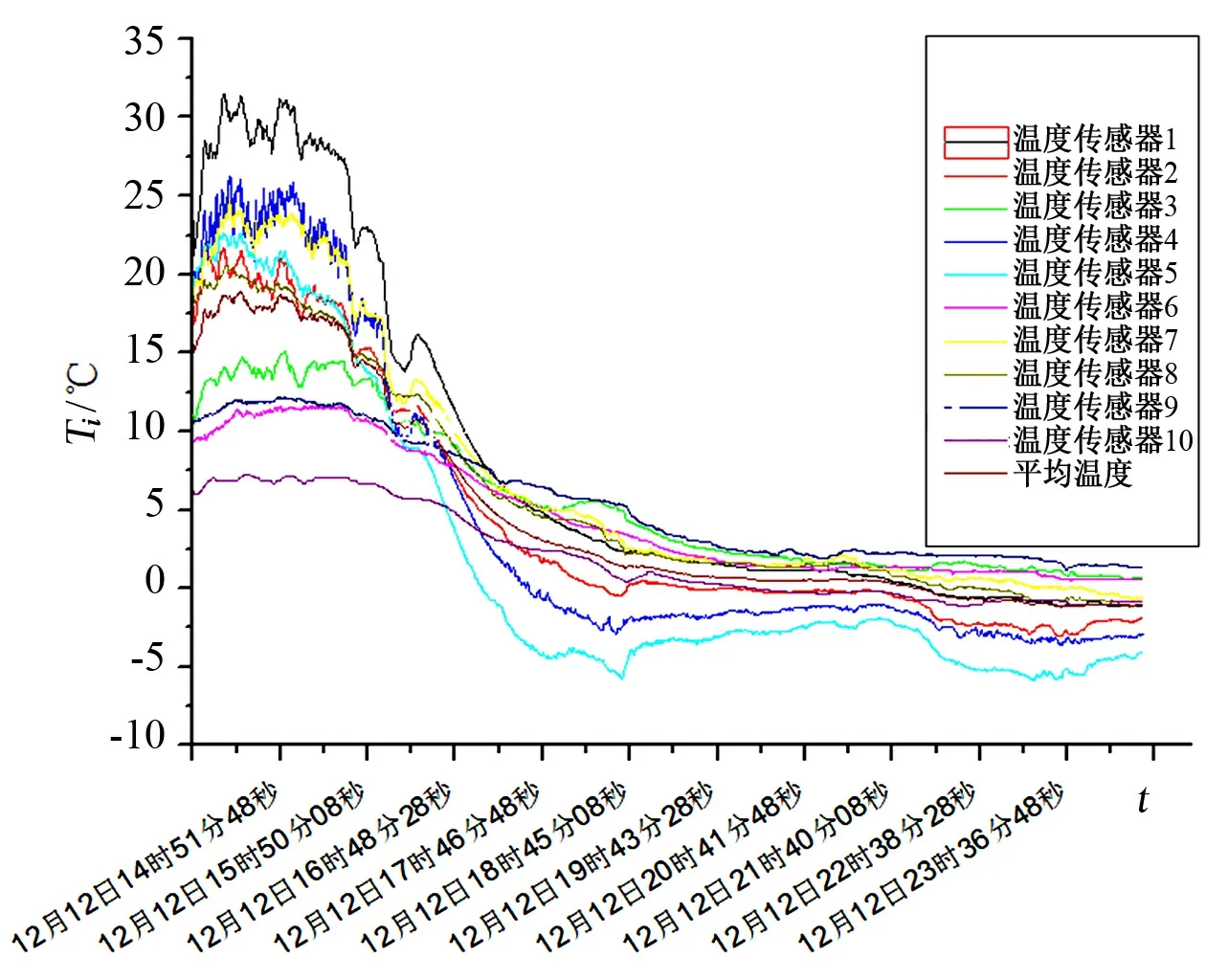
圖5 飛行器各部位溫度-時間變化圖Fig.5 Temperature-time variation curve of each part of the aircraft′s azimuth gesture

(a) 飛行器方位姿態(tài)和表面平均溫度-時間變化圖(a) Aircraft′s azimuth gesture and average temperature variation with time

(b) 飛行器方位姿態(tài)和飛行器首尾表面溫差-時間變化圖(b) Aircraft′s azimuth gesture and temperature difference between the head and tail of aircraft variation with time

(c) 飛行器方位姿態(tài)和飛行器左右表面溫差-時間變化圖(c) Aircraft′s azimuth gesture and temperature difference between the left and right variation with time
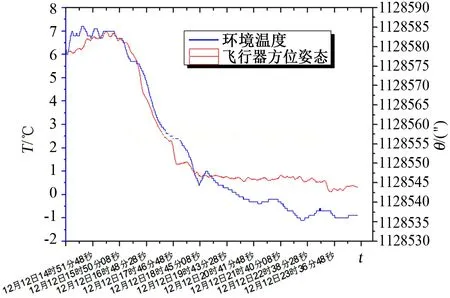
(d) 飛行器方位姿態(tài)和環(huán)境溫度-時間變化圖(d) Aircraft′s azimuth gesture and environmental temperature variation with time
由圖6可以看出,在長時間的野外實時監(jiān)測過程中,飛行器方位姿態(tài)角隨表面平均溫度、首尾表面溫差、左右表面溫差以及環(huán)境溫度有明顯的線性相關關系。

(a) 飛行器方位姿態(tài)-表面平均溫度擬合圖(a) Regression fitting of aircraft′s azimuth gesture for average temperature

(b) 飛行器方位姿態(tài)-飛行器首尾表面溫差擬合圖(b) Regression fitting of aircraft′s azimuth gesture for temperature difference between the head and tail

(c) 飛行器方位姿態(tài)-飛行器左右表面溫差擬合圖(c) Regression fitting of aircraft′s azimuth gesture for temperature difference between the left and right

(d) 飛行器方位姿態(tài)-環(huán)境溫度擬合圖(d) Regression fitting of aircraft′s azimuth gesture for environmental temperature
由圖7可以看出,通過對飛行器方位姿態(tài)變化與四種溫度參數(shù)進行線性擬合,野外飛行器方位姿態(tài)長時間變化與表面平均溫度和環(huán)境溫度最具有線性相關關系。


(a) 飛行器方位姿態(tài)-平均溫度擬合殘差圖(a) Residual graph aircraft′s azimuth gesture with average temperature
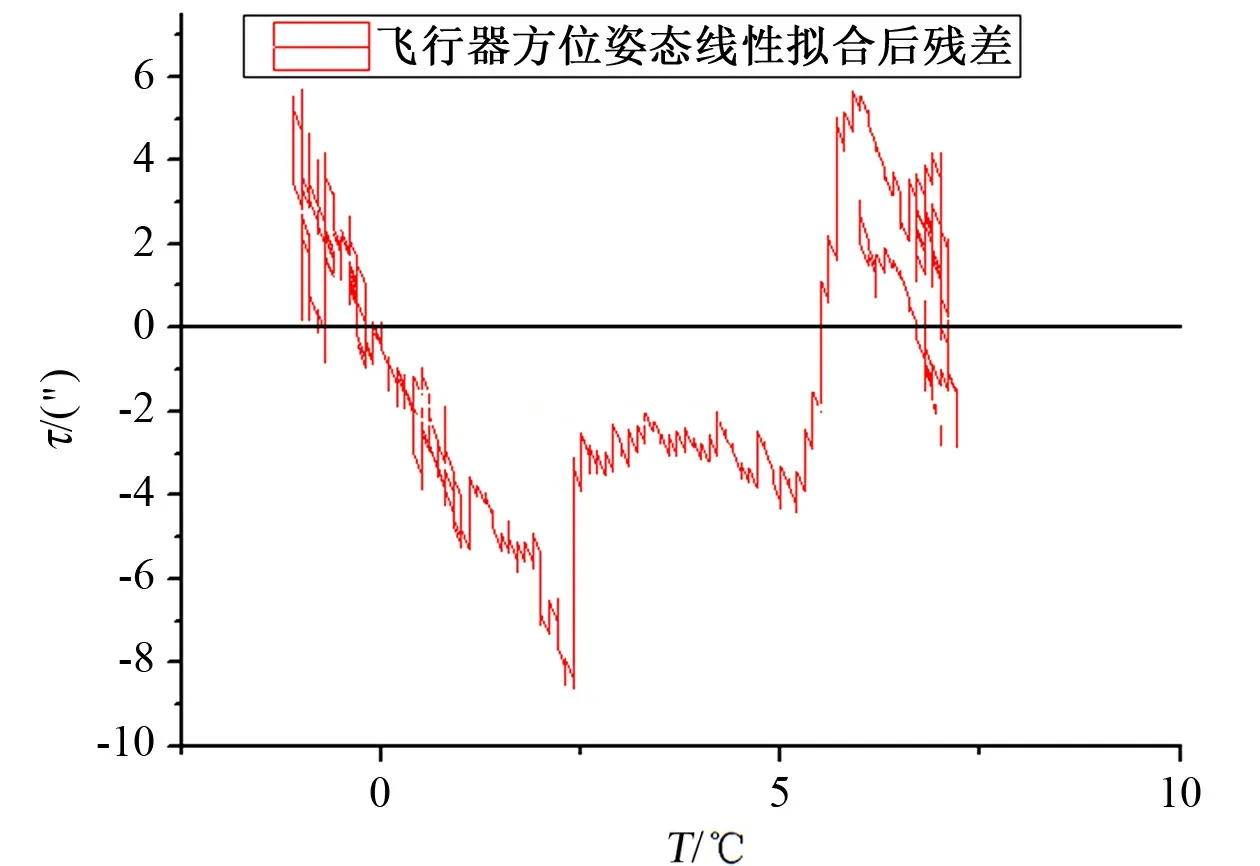
(b) 飛行器方位姿態(tài)-環(huán)境溫度擬合殘差圖(b) Residual graph aircraft′s azimuth gesture with environmental temperature
4 結束語
本論文采用先進的測角方法和測角設備,對飛行器在野外長時間熱待機狀態(tài)方位姿態(tài)的變化隨溫度變化的規(guī)律進行監(jiān)測和數(shù)據(jù)分析,并得出了得出野外飛行器方位姿態(tài)長時間蠕變的初步結論。該方法和結論可以廣泛應用于類似飛行器方位姿態(tài)變化的測量工作,對于航天及航空工業(yè)的發(fā)展具有重要的作用。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
