基于WLAN的大型船舶艙體內(nèi)部指紋定位算法
2018-09-02 11:08:16許智勛
艦船科學(xué)技術(shù) 2018年8期
關(guān)鍵詞:船舶
許智勛,高 尚
(江蘇科技大學(xué) 計(jì)算機(jī)科學(xué)與工程學(xué)院,江蘇 鎮(zhèn)江 212003)
0 引 言
隨著現(xiàn)代信息技術(shù)的發(fā)展,船舶設(shè)備的信息化水平也迅速提升[1]。其中,船舶導(dǎo)航定位系統(tǒng)一直以來都是保障船舶安全航行的重要助航系統(tǒng),并朝著綜合化、精確化、垂直化的趨勢(shì)發(fā)展[2]。對(duì)于大型船舶而言,設(shè)計(jì)尺寸、建造結(jié)構(gòu)、艙內(nèi)環(huán)境都日趨復(fù)雜,艙體內(nèi)的人員位置難以鎖定,將容易造成施工易迷路、作業(yè)效率低、緊急搜救難度大等問題。大型船舶艙體內(nèi)的人員定位研究對(duì)船舶的設(shè)計(jì)建造、日常作業(yè)、救援保障等方面有著重要的意義。
船舶導(dǎo)航定位領(lǐng)域常用的技術(shù)有衛(wèi)星定位技術(shù)[3]、傳感器定位技術(shù)[4]和無線通信網(wǎng)絡(luò)定位技術(shù)[5],具體包括GPS定位、北斗定位、紅外線定位、超聲波定位、超寬帶定位、射頻定位等。衛(wèi)星定位技術(shù)在船舶導(dǎo)航方面有成熟的沉淀積累,然而,由于多徑干擾、非視距傳輸、信號(hào)衰減等原因[6],衛(wèi)星微波信號(hào)無法穿透船艙建筑,提供艙體內(nèi)的定位服務(wù)。傳感器定位技術(shù)能夠?qū)崿F(xiàn)高精度定位,然而,需要大量的硬件部署,且要求定位空間內(nèi)的各項(xiàng)環(huán)境指標(biāo)長時(shí)間保持不變。無線通信網(wǎng)絡(luò)定位技術(shù)可利用現(xiàn)有通信網(wǎng)絡(luò)進(jìn)行定位,無需額外的硬件部署,其中WLAN定位技術(shù)采用2.4 GHz公開頻段及應(yīng)用廣泛的IEEE 802.11標(biāo)準(zhǔn)[7],具有容易部署、應(yīng)用范圍廣、環(huán)境適應(yīng)能力強(qiáng)等特點(diǎn)[8],更符合艙體內(nèi)定位環(huán)境和定位精度的需求。文獻(xiàn)[9]設(shè)計(jì)了基于二維碼指紋的主動(dòng)式艙體內(nèi)定位方法;文獻(xiàn)[10]利用Zigbee技術(shù)進(jìn)行艙內(nèi)人員定位;文獻(xiàn)[11]設(shè)計(jì)了船舶艙體內(nèi)的超聲波定位系統(tǒng);文獻(xiàn)[12]提出了超寬帶技術(shù),用于艙內(nèi)船員的救援監(jiān)測(cè)。
本文在綜合考慮船艙內(nèi)環(huán)境、精度要求、硬件部署及算法實(shí)現(xiàn)等因素,提出了基于WLAN的艙內(nèi)指紋定位方法。并針對(duì)定位各階段提出定位算法和AP選擇算法,與傳統(tǒng)定位算法和AP選擇算法相比,提升了船艙內(nèi)環(huán)境下的定位精度。
1 WLAN指紋定位模型
WLAN是一種基于IEEE802.11標(biāo)準(zhǔn)的無線局域網(wǎng)業(yè)務(wù)。在WLAN的網(wǎng)絡(luò)覆蓋區(qū)域內(nèi),若干接入點(diǎn)(AP)分散于空間各處,其信號(hào)的收發(fā)符合無線電磁波的傳播規(guī)律,可以利用數(shù)學(xué)模型將傳播信號(hào)轉(zhuǎn)化為確定性的長度、角度等參數(shù),或者概率性的指紋特征參數(shù)。
WLAN指紋定位流程如圖1所示。位置指紋是一種在信號(hào)特征與地理位置間建立起來的映射關(guān)系。通過離線階段采樣收集數(shù)據(jù),按照約定的規(guī)則存儲(chǔ),形成指紋數(shù)據(jù)庫;在線階段實(shí)時(shí)采集接收信號(hào)強(qiáng)度(RSS),經(jīng)特征提取后與指紋數(shù)據(jù)庫進(jìn)行比對(duì),找出等同或相似的一一映射關(guān)系,估算出待定位點(diǎn)的位置坐標(biāo)。RSS衰減模型表示如下:


圖1 WLAN指紋定位流程Fig. 1 WLAN fingerprint positioning process
1.1 離線訓(xùn)練階段
如圖2所示,離線訓(xùn)練階段需要對(duì)定位空間劃分采樣網(wǎng)格,在各采樣網(wǎng)格內(nèi)采集RSS指紋數(shù)據(jù),構(gòu)建指紋數(shù)據(jù)庫。圖2中,定位區(qū)域劃分為4行7列的網(wǎng)格(共28個(gè)網(wǎng)格點(diǎn)),2個(gè)AP。在每一個(gè)網(wǎng)格點(diǎn)上,利用移動(dòng)通信設(shè)備及進(jìn)行一段時(shí)間的數(shù)據(jù)采樣(5~15 min,每秒采集一次)得到來自各個(gè)AP的平均RSS,采集時(shí)考慮移動(dòng)設(shè)備不同的朝向和角度。
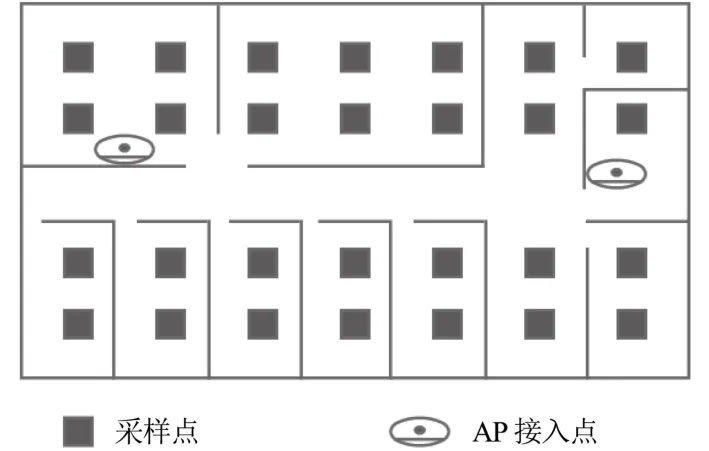
圖2 RSS指紋離線采集與訓(xùn)練Fig. 2 RSS fingerprint offline collection and training
圖3為在二維信號(hào)空間中展示的RSS指紋分布。當(dāng)AP數(shù)量擴(kuò)展到,則指紋將擴(kuò)展為維。

圖3 二維RSS指紋分布Fig. 3 Two-dimensional RSS fingerprint distribution
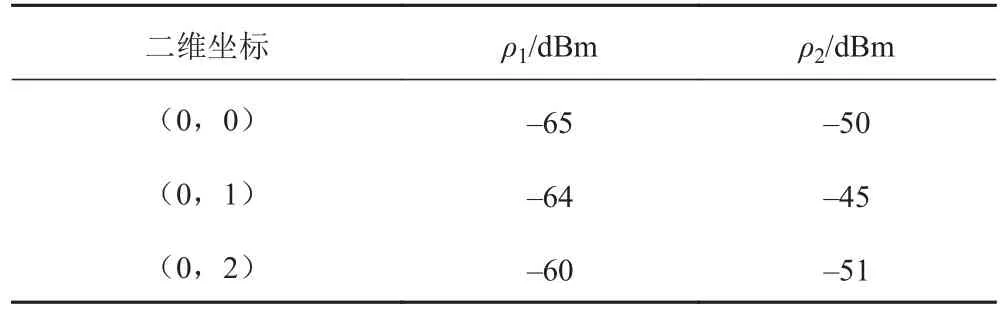
表1 RSS指紋數(shù)據(jù)庫Tab. 1 Example Fingerprint Database
1.2 在線估算階段
在線估算階段,移動(dòng)設(shè)備處于定位空間內(nèi),但是不知道它的具體位置坐標(biāo)。假設(shè)待定位點(diǎn)處采集到的RSS向量為需要將在線采集的RSS向量與離線指紋數(shù)據(jù)庫中的數(shù)據(jù)進(jìn)行匹配,找出最接近的指紋,通過指紋的坐標(biāo)來代替或者估算出待定位點(diǎn)的位置。如果那么最匹配的樣本是表1中的第1項(xiàng),移動(dòng)設(shè)備被定位于坐標(biāo)處。
如圖4所示,虛線表示指紋匹配采用的決策邊界,白色圓圈為待定位點(diǎn),在決策邊界內(nèi)有一個(gè)RSS指紋與白色圓圈接近,則可用該指紋對(duì)應(yīng)的坐標(biāo)作為待定位點(diǎn)的位置坐標(biāo)。常用的指紋匹配算法有K近鄰算法和樸素貝葉斯算法。

圖4 在線匹配估算Fig. 4 Online match estimate
2 貝葉斯分簇定位算法
定位空間中,將第i個(gè)參考點(diǎn)處的RSS向量記為待定位點(diǎn)處觀測(cè)到的RSS向量記為則其中表示該觀測(cè)點(diǎn)處可視AP的數(shù)量。若定位空間內(nèi)共有個(gè)參考點(diǎn),則共有組指紋數(shù)據(jù),記為與各組指紋有映射關(guān)系的參考點(diǎn)位置記為表示相應(yīng)位置坐標(biāo)。計(jì)算實(shí)時(shí)采集的在各個(gè)參考點(diǎn)位置上的后驗(yàn)概率用于表示某個(gè)參考點(diǎn)上能產(chǎn)生的概率。計(jì)算方法下式:


確定了概率和最大的簇之后,其中各參考點(diǎn)的后驗(yàn)概率將用于進(jìn)一步的位置估算。后驗(yàn)概率越大,則越接近定位目標(biāo),反之亦然。因此,繼而通過簇內(nèi)各點(diǎn)的后驗(yàn)概率,便可估算出目標(biāo)點(diǎn)的坐標(biāo)。

3 基于信息增益的AP選擇改進(jìn)算法
3.1 算法流程
由于并非所有可視AP均對(duì)定位有相同貢獻(xiàn)[13],所以需對(duì)AP進(jìn)行選擇,剔除無用AP,選取最佳AP子集用于定位。
本文所提的AP選擇算法流程,如圖5所示。在各網(wǎng)格采樣點(diǎn)采集可視AP的RSS數(shù)據(jù),將全體可視AP組成初始AP集合;計(jì)算出每個(gè)AP的信息增益值;在信息增益值的基礎(chǔ)上,分析出AP在相鄰AP中的可辨性,以反映一個(gè)AP的與其他AP之間的區(qū)分程度;將所有可視AP依照可辨性進(jìn)行綜合降序排列;選取前個(gè)AP組成篩選后的AP子集,建立位置指紋數(shù)據(jù)庫,作為在線定位階段的輸入。

圖5 AP選擇流程圖Fig. 5 AP selection flow chart
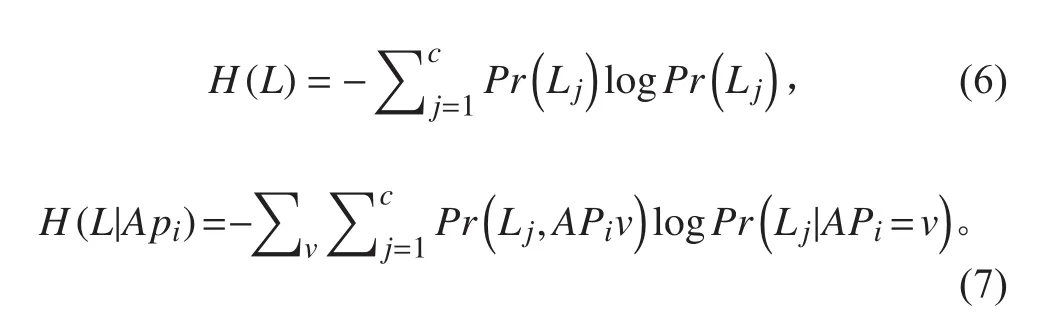
3.2 信息增益計(jì)算
首先給出單個(gè)AP的信息增益的計(jì)算,如下式:

3.3 綜合可辨識(shí)性計(jì)算

4 仿真與實(shí)驗(yàn)結(jié)果分析
根據(jù)本文提出的算法,選取包含12個(gè)房間1條走廊的一個(gè)樓層進(jìn)行仿真實(shí)驗(yàn)。各房間房門關(guān)閉,以模擬船艙的封閉式狀態(tài)。選取經(jīng)典的K近鄰算法[14]、樸素貝葉斯算法[15]2種定位算法同貝葉斯分簇定位算法進(jìn)行對(duì)比;選取Max-Mean算法[16]和InfoGain算法[17]2種AP選擇算法與本文基于信息增益的AP選擇改進(jìn)算法進(jìn)行對(duì)比。
定位算法仿真結(jié)果如圖6所示,可以看出,本文算法在定位精度上優(yōu)于樸素貝葉斯算法和K近鄰算法,在1.5~2.5 m的誤差范圍內(nèi),累積概率明顯提升。其中,誤差范圍在1.5 m以內(nèi)的累積概率,本文算法比樸素貝葉斯算法和K近鄰算法的定位精度分別提升10%和25%。說明本文算法有效提高了定位算法的精度范圍,在采樣網(wǎng)格尺寸不變的情況下,更高定位精度結(jié)果出現(xiàn)的概率明顯提升。
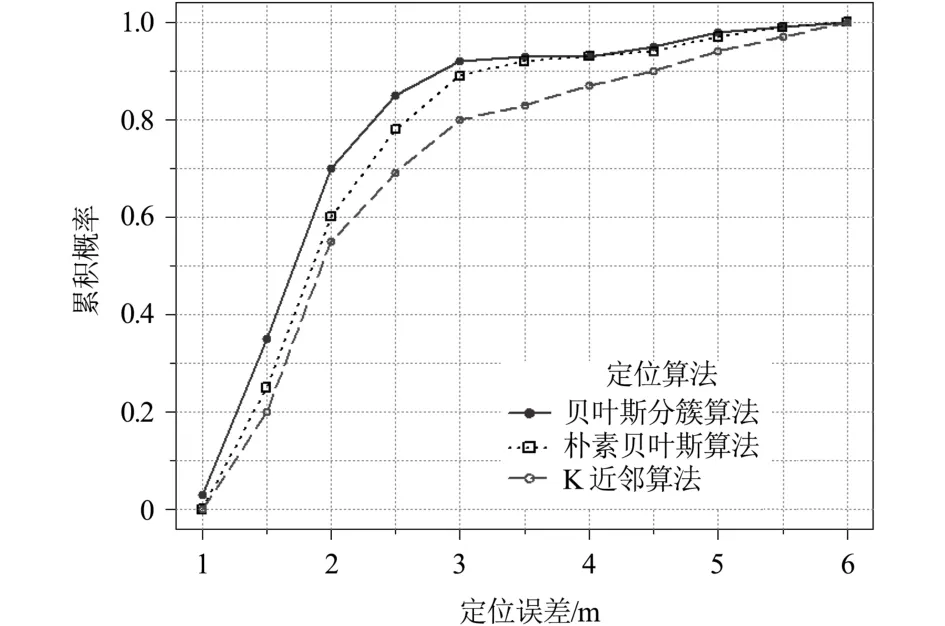
圖6 定位算法比較Fig. 6 Positioning algorithm comparison
圖7為AP選擇算法在不同采樣點(diǎn)處的定位結(jié)果。可以看出,本文提出的AP選擇算法定位誤差要低于另外2種。在不同位置上的定位穩(wěn)定性也更高,定位誤差范圍始終在1.5~2.5 m上下浮動(dòng)。

圖7 AP選擇算法定位誤差Fig. 7 AP selection algorithm positioning error
3種AP選擇算法下的累積誤差分布圖如圖8所示。可以看出,本文的AP選擇算法使整體定位精度明顯提升,同InfoGain算法和Max-Mean算法相比,定位誤差在1.5 m以內(nèi)的概率分別增加了12%和24%;定位誤差在2 m以內(nèi)的概率分別增加了7%和13%。

圖8 誤差累積概率Fig. 8 Error accumulation probability
5 結(jié) 語
在大型船舶艙體內(nèi)定位的應(yīng)用背景下,本文提出了基于WLAN的艙體內(nèi)指紋定位算法。對(duì)在線階段和離線階段分別提出了貝葉斯分簇定位算法和基于信息增益的AP選擇改進(jìn)算法。實(shí)驗(yàn)結(jié)果表明,本文所提算法能夠符合大型船舶艙體內(nèi)多封閉空間下的定位需求。本文算法與傳統(tǒng)室內(nèi)定位算法及AP選擇算法相比,定位精度明顯提升。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機(jī)械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
