軸系減振器相位角的頻域分析提取技術
2018-09-08 08:14:36新宋璇蔣
中國機械工程 2018年16期
張 新宋 璇蔣 勵
1.西安郵電大學電子工程學院,西安,710121
2.西安郵電大學計算機學院,西安,710121
0 引言
船舶軸系是船舶動力裝置中必不可少的組成部分,其主要作用是將主機發出的能量傳給螺旋槳,從而帶動螺旋槳旋轉,螺旋槳旋轉的同時產生推力推動船體前進[1?2]。船舶主機是船舶的動力心臟,其安全穩定的運行是保證船舶航運安全的關鍵[3],目前絕大多數船舶都以內燃機中的往復式柴油機作為主機,其軸系是彈性系統,在運轉過程中,當干擾力矩的頻率和軸系的固有頻率相同時會發生扭轉共振,其危害極其嚴重,因此,船舶復雜推進軸系扭轉振動問題越來越受到重視[4]。加裝減振器是吸收振動最直接的方法[5]。當遇到扭轉振動時,減振器能起到緩和沖擊的作用,將“大能量一次沖擊”變為“小能量多次沖擊”,進而逐步將“小能量多次沖擊”減少[6]。
針對減振器性能的判斷,目前國內外并未見具體研究。本文提出了船舶軸系減振器相位角頻域分析提取算法,通過船舶軸系扭振測量儀測得減振器內、外圈扭角速度曲線,計算得到減振器相位角,對相位角數據用最小二乘法篩除誤差較大數據,并進行曲線擬合,得到減振器相對相位角曲線;再計算后得到阻尼系數曲線,將其與標準阻尼系數曲線對比,即可判斷該船舶軸系減振器的性能。
1 減振器相位角頻域分析提取算法
船舶航行時減振器能有效減小軸系的扭轉振動,避免斷軸等危險事故。減振器屬于易耗品,其性能隨著時間的推移有所衰減,由此需要在航行時實時檢測軸系減振器的性能。
針對目前無法直接測得減振器相位角這一問題,本文提出了減振器相位角頻域分析提取算法。該算法通過扭振測量儀測得減振器內外圈扭角曲線,經過計算,最終得到減振器相位角及阻尼系數曲線。
使用某船舶軸系扭振測量儀測量得到減振器內圈扭角曲線Ainn(t)、外圈扭角曲線Aout(t),求導得到內圈扭角速度曲線Vinn(t)、外圈扭角速度曲線Vout(t),根據實時差值求導得到相對扭角速度時域曲線Vrel(t):

對Vout(t)和Vinn(t)的傅里葉變換進行頻域分析,得到兩個時域曲線的各諧次幅值An、Bn,其中,n代表第n諧次。

作為n缸機主諧次的n諧次扭轉振動占主要地位,其他諧次干擾很大,可忽略。第n諧次的相對扭角速度(t)滿足如下關系式:

式中,An為Vout(t)第n諧次幅值;Bn為Vinn(t)第n諧次幅值;Cn為Vrel(t)第n諧次幅值;φ為減振器相位角;θ為彈性扭矩與阻尼扭矩的矢量合成角。
由式(2),得

由減振器外圈角加速度產生的減振器內外部分的總扭矩Ttot(彈性扭矩及阻尼扭矩),可以通過減振器扭角加速度a(t)與減振器的轉動慣量J相乘得到,即
根據計算所得的合成角θ,彈性扭矩Tela和阻尼扭矩Tdam分別為

最后可計算出阻尼系數

2 誤差分析
2.1 誤差產生的原因
上文提出的減振器相位角頻域分析提取算法在理論層面是準確的,但在實際測量中,難免會產生誤差,原因如下:
(1)由于測量環境是基于固定在輪機艙甲板以及減振器外殼的傳感器獲得原始信號,故扭轉振動通過機艙振動傳遞到傳感器,使傳感器自身存在一定的扭擺抖動,其中,減振器內圈的扭振信號來自主軸自由端的光電編碼器,角碼器自身也存在一定的扭擺,該扭擺的幅度會更大,這兩者的扭擺給相對扭角速度的測量和計算帶來一定的誤差,該誤差進一步影響到相位角φ和扭矩矢量合成角θ,產生較大的誤差干擾,導致計算獲得的相位角和扭矩矢量合成角在同一轉速下產生較大變化。
(2)船舶振動中除了扭轉振動,還存在由海上復雜環境所引起的其他振動,因此,獲得原始信號的傳感器會受到船體其他振動的影響。
(3)傳感器自身會受到經由船體傳導的振動信號,該信號具有多徑性和回聲性,會對原始信號產生干擾。
(4)對減振器性能的分析是基于船舶勻速行駛時采集的數據,因此,船舶在緊急加速和減速狀態下行駛的數據會有一定誤差。
2.2 誤差消除的方法
當誤差無可避免時,為了使結果更準確,需要消除數據誤差,一般有2種方法:利用數字濾波技術消除誤差;人工數據處理消除誤差。
數字濾波技術是針對可能存在的誤差,建立數字濾波器模型,對測得數據進行數字濾波。該方法方便快捷,可應對大量數據,但目前效果不如人工手動處理,還需后續進一步研究改善。而人工數據處理是將測量得到的數據進行曲線擬合,得到一條相對平滑的曲線。將原始數據(圖1、圖3)與擬合曲線(圖2、圖4)進行對比,見圖1~圖4,人工刪除相差較大的點。該方法效果較好,但費時費力。


圖2 誤差處理后的減振器相位角曲線Fig.2 Phase angle curve of dam per after error p rocessing

圖3 誤差處理前的阻尼系數曲線Fig.3 Dam p ing coefficien t cu rve before error p rocessing

3 實船測試
應用本文提出的減振器相位角頻域分析提取算法,在某船廠“春和”號輪船上進行扭轉振動測試,船舶在壓載工況下保持正常發火及直線航行,主機轉速以1 r/m in的步長從40 r/m in緩慢加速至85 r/m in,在每個轉速工況下至少穩定1m in時記錄數據。該船舶為5缸機船舶,故n=5,應用本文算法進行計算分析。
在減振器內外圈測得1節點5諧次扭振共振,共振轉速為52.84 r/m in,內圈共振振幅1.218°(21.254m rad),外圈共振振幅2.342°(40.876m rad)。根據測得工況,合成給出的減振器內外圈和相對扭角振幅的頻域曲線,見圖5、圖6。
根據上文算法,計算出相位角數據,再利用M ATLAB中基于最小二乘法原理的polyfit函數對所得數據進行曲線擬合,并篩除誤差較大的數據,最終擬合的減振器相對相位角曲線見圖7。根據減振器外圈扭角速度計算得到的扭角加速度曲線見圖8。

圖5 減振器第5諧次扭角振幅曲線Fig.5 Am p litude cu rve of torsional angle of fifth harm onic dam per

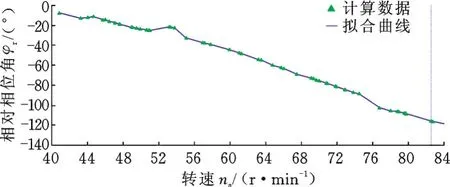
圖7 減振器相對相位角曲線Fig.7 Relative phase angle curve of dam per

圖8 減振器外圈扭角加速度曲線Fig.8 Tw ist angle acceleration curve of dam per ou ter ring
運用本文算法,最終計算得到的減振器彈性扭矩和阻尼扭矩曲線見圖9。根據式(5)~式(9)計算得到阻尼系數Dc,見圖10,根據船舶自身參數,式(6)中轉動慣量J=13 900 kg·m2。
通過圖7、圖10實船測試得到的相位角曲線和阻尼系數曲線,與國際標準曲線圖11、圖12對比,即可判斷出該減振器的性能。由此證明,本文提出的減振器相位角頻域分析提取算法的準確性。


圖10 阻尼系數曲線Fig.10 Dam p ing coefficient cu rve

圖11 相位角的標準曲線Fig.11 Standard curve of phase angle
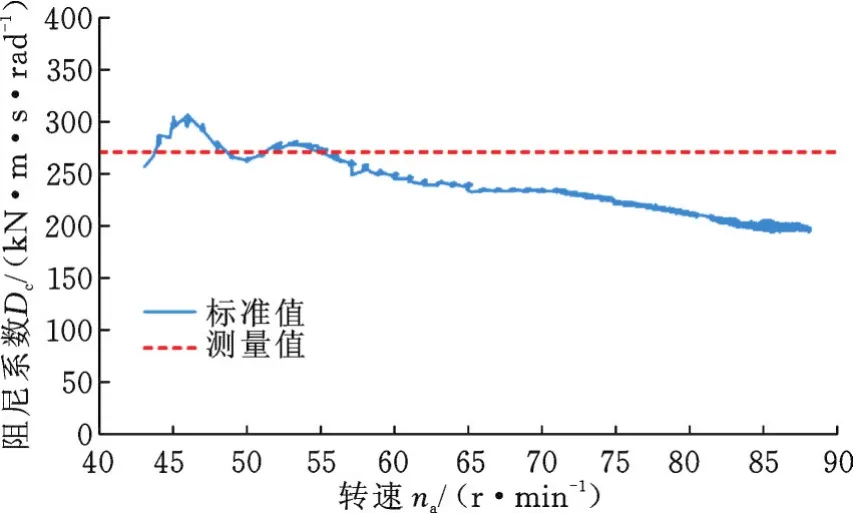
圖12 阻尼系數的標準曲線Fig.12 Standard curve of dam ping coefficient
4 結論
本文針對船舶行進過程中無法判斷減振器性能這一問題,提出了減振器相位角頻域提取技術,使用船舶軸系扭振測量儀測量得到減振器內外圈扭角速度曲線,通過傅里葉變換進行頻域分析,得到兩曲線的幅值曲線,再經過三角變換得到減振器相位角與合成角,經計算得到阻尼系數曲線。通過與標準阻尼系數曲線對比,判斷減振器性能。通過實船測試,驗證了該算法對減振器相位角、合成角和阻尼系數計算的準確性,以及該算法的實用性,算法可廣泛用于軸系減振器測量分析中。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年8期)2022-06-05 07:36:28
艦船科學技術(2022年2期)2022-03-29 01:12:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
中國船檢(2017年3期)2017-05-18 11:33:09