聲信標的定向算法及其在智能車尋跡中的應用
2018-09-10 00:58:05聶權
河南科技 2018年8期
聶權
摘 要:聲信標的定向定位技術是聲定位的關鍵技術之一,不同于基于強度差的定位技術,其能更加準確地反映目標當前的位置。該技術被廣泛應用于災難救助、軍事和交通管理等領域。本文重點研究聲信標定向算法在智能車尋跡中的應用。
關鍵詞:聲信標定向算法;智能車尋跡;音頻處理
中圖分類號:TP23 文獻標識碼:A 文章編號:1003-5168(2018)08-0013-03
The Orientation Algorithm of Sound Beacon and its Application
in Tracking of Intelligent Vehicle
NIE Quan
(School of Electronic Informatio, North China University of Technology, Beijing 100043)
Abstract: The directional positioning technology of sound beacon is one of the key technologies of acoustic positioning, which is different from the location based on the intensity difference, which can more accurately reflect the position of the target. This technology is widely used in disaster relief, military and traffic management. This paper focused on the application of acoustic beacon orientation algorithm in intelligent vehicle tracing.
Keywords: orientation algorithm of sound beacon;tracking of intelligent vehicle;audio processing
聲場定位技術被廣泛應用于各種機械故障檢測、智能機器人尋跡、水下目標定位和無人潛航器中。在大學生智能車信標組的比賽中,也引入了基于聲音的信標系統。本文利用雙拾音器系統采集信標信號,通過相關算法實現聲場定向,并在此基礎上探討智能車的尋跡算法,并對該算法進行仿真分析。
1 雙拾音器定向系統設計
1.1 音頻定向系統的組成
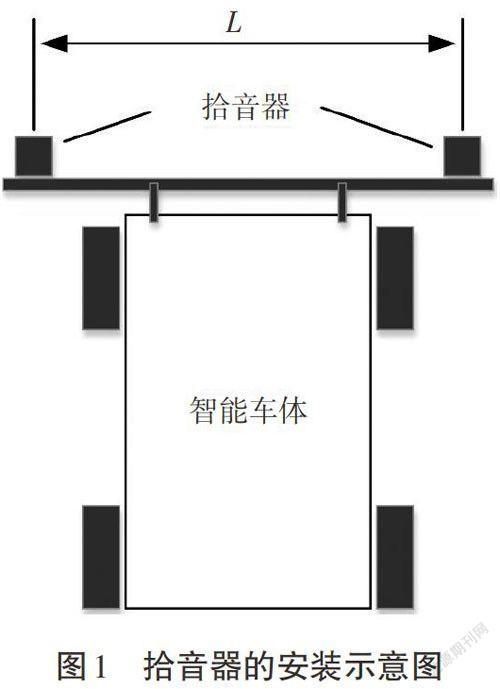
音頻定向系統由安裝在車頭左右兩邊的兩個拾音器組成(見圖1),間隔距離為L,用于實現雙聲道的立體聲音頻采集。
1.2 聲信標采集與處理系統組成
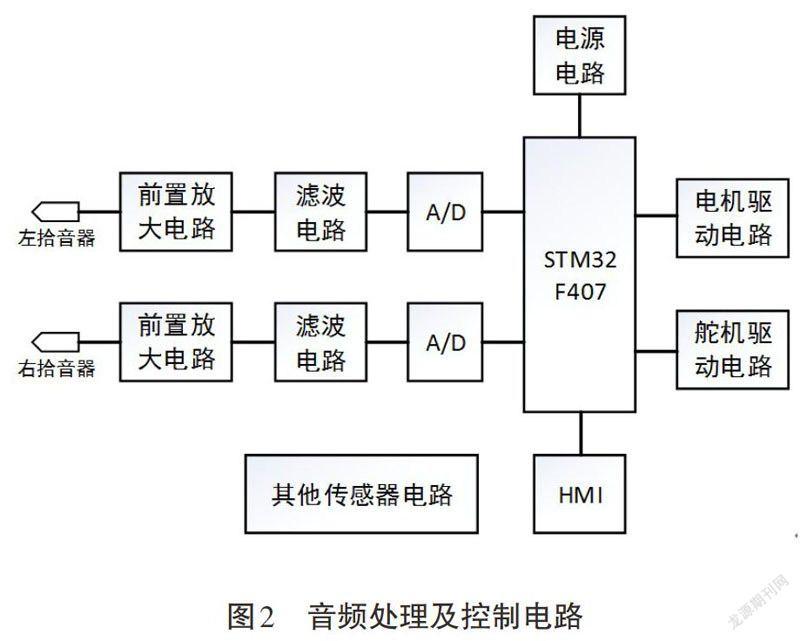
采集后的音頻信號經過前置放大后,用濾波電路濾除干擾[1]。然后,由高速AD采集進微控制器做后續處理。主控微控制器選用意法半導體的CortexM4芯片STM32F407,其內部集成了3個獨立的12位AD,完全滿足雙通道音頻信號的同步采集。
音頻處理及小車控制電路如圖2所示。假設信標音頻為fKHz,濾波電路設計成帶通濾波,通頻帶為[fK-ΔfK,fK+ΔfK],帶寬為2[ΔfK]。為了后面相關算法處理方便,此處帶寬不要設得過窄。根據香農采樣定理,AD采樣速率不應低于2*fkHz。智能小車使用了多種傳感器,本文主要討論音信標的處理,其他的不展開討論。
2 音頻信標相關定向算法
2.1 雙聲道定向原理
左拾音器ML與右拾音器MR間距為L。假設聲信標F在小車的左上方,F與左拾音器距離DL,與右拾音器距離DR,VS為空氣中的音速。
則聲信標F發出的聲音傳到左拾音器ML與右拾音器MR時間TL和TR分別為:
[TL=DL/VS] [TR=DR/Vs] (1)
則左、右拾音器接收到音頻延時不一致,接收的信號存在相位差。時間差為:
[ΔT=TR-TL=DR-DLVS] (2)
式(2)可以建立一個方程,但要想定位F在平面上的具體位置,需要至少兩個方程。也就是說,如果需要定位出信標的具體位置,至少需要三個拾音器才可以。
在只有兩個拾音器的情況下,可以求出時間差[ΔT]。根據聲速,可以得到F距離兩個拾音器的距離差[ΔD],如圖3所示。此時,滿足條件的是以MR為中心,半徑為[ΔD]的圓上的點。由于可以保證信標是在車的前方([ΔD]>0說明是在左前方,[ΔD]<0時,要以ML為中心畫圓),因此對于一個測定的時間差[ΔT],F結果應該是在[θ]∈[0,90°]變化的射線上,做射線與圓的交點以及ML連線的中垂線,該中垂線與射線的焦點就是F的定位點。所以,對于一個給定的時間差[ΔT],F位置應該按圖3[θ]∈[0,90°]變化時的一條軌跡。所以兩個拾音器不能定位,只能定向[2]。
2.2 求[ΔT]的相關算法
聲信標經過空氣信道傳播,會帶來衰減和噪聲。由于聲信標到拾音器的距離遠大于兩組拾音器之間的距離,因此,當信標信號先后到達兩個拾音器時,可以認為兩個不同傳播路徑上的噪聲對于兩個拾音器是基本一致的,因此采用相關分析法來確定其接收信號的相位差(時間差[ΔT])。
如圖4所示,[SL(t)],[SR(t)]分別表示左、右兩個拾音器接受的信號,其互相關函數可以記為:
[RLR=-∞+∞SLt-τ?SR(t)dt] (3)
由于是同一個信源發過來的信號,假定信源信號為[Ft],兩個拾音器信道脈沖響應函數分別為[H1(t)]和[H2(t)],則有:
[SLt=Ft*H1(t)] (4)
[SRt=Ft*H2(t)] (5)
由于兩個信道路徑基本相同,因此,可以認為一個信道相對另外一個信道只是多了一個延時。式(5)可以寫成復平面的表達式:
[SRS=H2S*FS=H1S*FS*DS=SLS*DS ](6)
式中,[DS]是時延環節傳遞函數,式(6)寫成時域表達式:
[SRt=0∞Dα?SLt-αdα] (7)
在有限的積分時間內,式(3)可以寫作:
[RLR=1T0TSLt-τ?0∞Dα?SLt-αdαdt]
[=0∞Dα?1T0TSLt-τ?SLt-αdtdα] (8)
[=0∞Dα?RSLL(τ-α)dα]
D(S)是一個簡單的時延脈沖,式(8)進一步改寫為:
[RLR=0∞δt-τ0?RSLLτ-tdt=RSLLτ-τ0] (9)
式(9)表明,兩個拾音器接收信號的互相關函數在其相位時延[τ=τ0]處具有最大值。也就是說,通過對兩路拾音器信號做互相關計算,找到最大值時刻,就可以求出信號的相對時延。
3 時延算法的仿真實驗
通過計算機采集信標音頻信號模擬拾音器的接收信號。由于目前計算機的采集聲卡都是單聲道的,無法同時模擬兩路拾音器,所以,對采集的兩路信號做不同時延處理,模擬不同路徑上的時延差,然后對采集的兩路信號進行相關處理得到時延。實驗結果如圖5所示。
圖5(b)是對雙拾音器獲得的音頻信號進行相關運算的結果,縱坐標是相關函數值,橫坐標是數據采集碼元數量,峰值出現在2 056個碼元位置(2 048是零延遲位置),采樣率是20kHz,碼元寬度是0.05ms,則可以知道通道延時差是0.4ms。剛好與設置的通道延遲差一致。通過仿真結果可以看出,當改變麥克風位置(通過改變延時),算法可以正確跟蹤時延。
4 小車尋跡控制算法
雙拾音器只能做定向,無法定位信標源,要想完成準確定位,還需要和小車的控制結合起來。
在完成一次定向計算后,可以控制小車朝信標源方向進行轉向,小車在一個節拍控制的行駛位置變化是可以通過幾何模型計算出來。在新的位置又可以進行一次定向計算,這樣聯立兩個方程就可以完成信標源的定位[3]。
在實際智能車控制中,通常不需要進行信標源定位,因此,每步只需要定向,然后結合小車單節拍的控制算法就可以實現尋跡。比如,一個簡單有效的控制算法是,當[τ>0],控制小車左轉向;當[τ<0],控制小車右轉向,這樣就可以控制小車完成尋跡。在實際控制算法中,為了防止過度調向引起小車左右搖擺,通常在控制時會給出一個死區閾值,只有大于這個閾值,才會進行調節。
5 結語
本文通過理論建模和分析,對雙聲道信號使用相關分析法處理得到相位差的方法來實現聲信標源的定向,并將算法引用到智能小車的尋跡控制中。通過仿真和實際實驗得出,該算法能較好地實現定向作用,提高小車的目標識別能力。
參考文獻:
[1]付海生,涂曾兵,戴宗明,王博.實現信標識別及定向運動的智能車設計[D].焦作:河南理工大學,2017.
[2]陳涓.移動信標的無線傳感器網絡定位算法研究[D].長沙:中南大學,2009.
[3]梁宇,馬良,納霞,陳晨. 基于廣義互相關算法的時延估計[D].昆明:云南大學,2011.
