機載激光測量系統在地質災害中的應用
2018-10-09 03:05:42彭勁松周光明
測繪通報 2018年9期
彭勁松,許 俊,李 娟,周光明
(1. 湖南環境生物職業技術學院,湖南 衡陽 421005; 2. 武漢海達數云技術有限公司,湖北 武漢 430023)
機載三維激光雷達掃描測量(簡稱機載LiDAR)是一種利用傳感器所發出的激光測定傳感器與目標之間距離的主動遙感技術。根據LiDAR的載體平臺,可分為星載、機載、車載和地面4大類。其中,機載LiDAR系統因無人機的迅猛發展而應用最為廣泛。
LiDAR技術是近年來迅速發展并可有效快速獲取高精度地形、地貌數據的有效手段。由于激光可以透過植被縫隙到達地表,因此機載LiDAR系統可快速獲取到森林覆蓋地區地表高程信息。本文將重點介紹機載LiDAR的系統組成及區別于傳統遙感手段的優勢,并結合鮮水河斷裂帶項目的數據獲取、處理和信息提取來進一步說明機載LiDAR的優勢。
1 機載LiDAR系統組成和優勢
1.1 系統組成
機載激光雷達測量系統設備主要包括3大部件:激光掃描儀、航空數碼相機、定位定姿系統(包括GNSS和IMU)。其中機載激光掃描儀主要獲取三維激光點云數據,同時記錄回波強度及波形;航空數碼相機通過拍攝采集航空影像數據;定位定姿系統記錄測量設備在每一瞬間的空間位置與姿態,由GPS確定空間位置,IMU慣導測量仰俯角、側滾角和航向角數據。機載LiDAR利用激光器發射激光,從GPS得到激光器的位置,從INS得到激光發射方向,即可準確地計算出每一個地面光斑的坐標(X,Y,Z)。激光束發射的頻率可以從每秒幾個脈沖到每秒幾萬個脈沖。一般而言,LiDAR系統獲取到的點云數據在每平方米1~100不等,由載體飛行器速度、激光脈沖頻率綜合決定。如圖1所示。
1.2 機載LiDAR技術優勢
與傳統的遙感手段相比,機載LiDAR技術具有以下優勢:①可穿透植被。LiDAR對植被的穿透能力可有效地去除植被覆蓋對地面高程測量的影響,增加了對地面數據的有效測量,大大提高了測量精度。②主動非接觸測量。與光學遙感相比,機載LiDAR技術不限于單一光照,不受陰影和太陽高度角的影響,在傳統攝影測量方式無能為力的山區和植被等陰影地區,不會影響到測量數據的精度。③遠距離高精度三維測量。機載LiDAR系統可以對傳統手段束手無策的植被覆蓋茂密地區、沙漠、灘涂地及高差較大的地形復雜地區等進行遠距離測量獲取高精度DEM數據。④直接連續定位測量。在機載LiDAR系統進行測量過程中同步進行地面點連續GPS定位和機載GPS系統差分處理,獲取的數據具有真實的地理坐標,是對地表三維坐標進行直接測量;相對傳統攝影測量手段通過間接方法獲取的數據更加高效和準確。

圖1 點密度計算
2 項目簡介
鮮水河斷裂帶位于青藏高原東南緣的四川西部地區,是一條北西走向的弧形左旋走滑斷裂帶。本次主要選取了鮮水河斷裂帶上兩個典型的區域進行激光雷達點云數據采集,其位置分別為康定市孟慶村、甘孜縣庭卡鄉,測區海拔高、人工測量難度大、少量植被且測區中間被河水分割為兩部分。采取機載激光雷達掃描方式可以一站式快速獲取到測區的三維激光點云數據,對點云進行快速處理即可得到測區1∶2000的DEM數據。項目使用武漢海達數云技術有限公司集成的ARS-200輕型機載激光測量系統,該系統有重量輕、精度高的特點,系統技術參數見表1。
3 數據處理
數據處理的主要內容包括以下幾個方面:
(1) 定位定姿數據處理。根據差分GPS原理,利用地面基站GPS靜態數據和機載飛行平臺動態GPS數據聯合解算得出飛行軌跡的三維坐標,將平臺系統上的INS數據利用GPS時間同步結合到三維軌跡信息上,得到具有激光掃描儀瞬時位置和姿態信息的飛行軌跡。
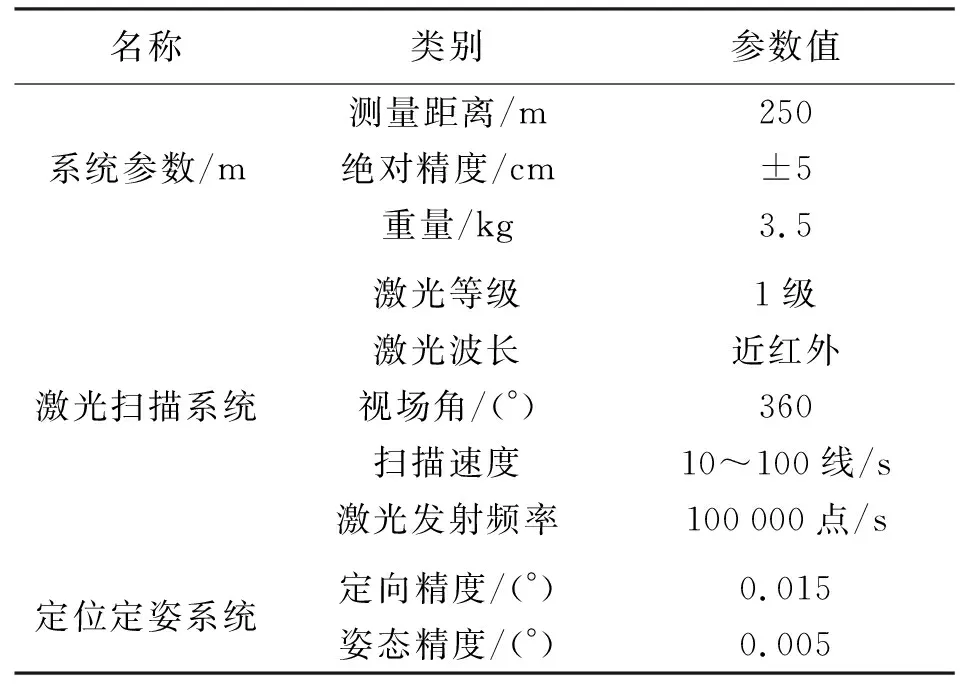
表1 使用設備技術參數
(2) 激光掃描數據處理。根據得到的200 Hz高頻的瞬時位置和姿態信息結合激光掃描數據,加入系統誤差改正參數和坐標投影參數,求出具有WGS-84三維坐標的點云數據。
(3) 航帶拼接。將每條航帶點云數據與參考面數據進行比較,對點云進行航帶平差校正。航帶偏移小于限差后,再進行航帶拼接。
(4) 激光點云數據分類。根據點云的幾何信息、反射強度等對地面點和非地面點進行分離,并根據實際應用的需求對非地面點進行進一步分類。
(5) 數字高程模型和數字表面模型等地形成果產品生成。
4 信息提取
(1) 康定市孟慶村測區內平均海拔2600 m,測區面積約0.1 km2。三維坐標數據原始點云密度可到達80點/m2,經過地表點過濾后點云密度10點/m2。將地表三維點云數據通過構TIN不規則三角網的方式生成數字高程模型。如圖2、圖3、圖4所示。

圖2 測區1原始點云數據

圖3 測區1過濾后點云數據
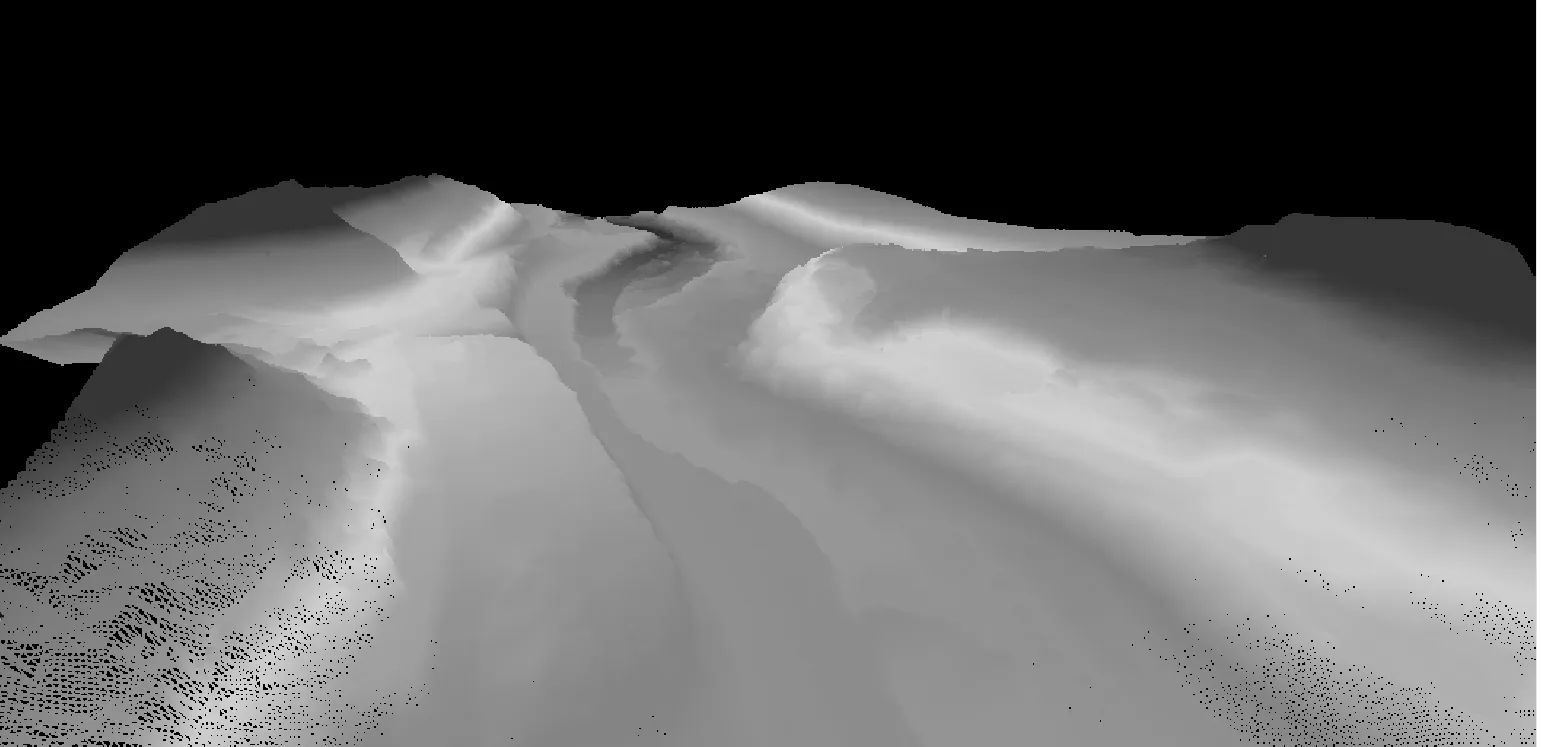
圖4 測區1構造TIN網格(1 m間距)
(2) 甘孜縣庭卡鄉測區內平均海拔3400 m,測區高差約70 m,測區面積約0.15 km2。3400 m海拔已經具備高原特性,無人機飛行需要更換高原槳才可以繼續安全作業,在高原上相對于低海拔的區域作業無人機的續航能力也會有所降低。獲取到測區的三維坐標數據原始點云密度為75點/m2,經過地表點過濾后點云密度10點/m2。將地表三維點云數據通過構造TIN不規則三角網的方式生成數字高程模型。數據成果如圖5、圖6、圖7所示。

圖5 測區2原始點云

圖6 測區2過濾后點云數據

圖7 測區2構造TIN網格(1 m間距)
5 結 語
機載激光雷達系統以其高精度、高密度、高效率、產品豐富等特點在地質災害區域應用方面有著得天獨厚的優勢,特別是無人機激光測量系統可對人工無法到達或危險性比較大的區域進行測量工作,其局限性從總體上來講要小于傳統航空攝影測量,將逐步成為測量業界應用較廣、較先進的測繪方法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
