ADAS 技術的研究
2018-10-10 06:41:56
汽車文摘 2018年10期
關鍵詞:檢測
1 前言
先進駕駛輔助系統(ADAS)使用安裝在車輛上的各種傳感器從車輛內部和外部收集環境數據,并識別和檢測靜態和動態對象,使駕駛員能夠在最快的時間內意識到可能發生的危險,提高主動安全技術的安全性。其中目標檢測、道路標志識別、自動駕駛狀態估計、目標定位等是智能駕駛輔助系統(ADAS)和自動駕駛的關鍵。
2 目標檢測技術的研究[1]
開發智能駕駛輔助系統(ADAS)和自動駕駛、實時穩定的行車目標檢測是汽車環境感知的關鍵模塊之一。利用多傳感器融合(如攝像頭、毫米波雷達、激光雷達等)可準確、完整地獲取目標信息。毫米波雷達在惡劣天氣條件下可以提供相對較高的距離和速度分辨率,但其視場有限、橫向分辨率低、無法識別目標類型。然而,攝像頭可以提供準確的目標類型,但障礙物距離估計精度較低,若將二者的數據進行融合,則可提供更準確、完整的目標信息,提高環境感知性能。

圖1 SSD模型結構[1]
作者Yu提出一種基于卡爾曼濾波和貝葉斯估計相結合的目標檢測方法,具體步驟如下:
(1)利用SSD(Single Shot MultiBox Detector)算法對攝像頭所捕獲圖像中的目標進行檢測,得到目標的類型和邊界(圖1)。SSD方法基于卷積網絡(CNN),其模型結構主要包括基礎網絡、用于檢測的多尺度特征圖、用于檢測的卷積預測器、默認邊界和長寬比。
(2)利用坐標變換矩陣統一攝像頭與雷達的坐標系。相關坐標系包括世界坐標系、雷達坐標系、攝像頭坐標系和圖像像素坐標系,其中世界坐標系原點位置與雷達坐標系原點位置一致。
(3)利用卡爾曼濾波對雷達和攝像頭檢測到的目標進行跟蹤,以降低測量噪聲。
(4)基于貝葉斯估計計算融合權重,根據融合權重和跟蹤結果對目標數據進行融合。
設計仿真實驗來測試和優化所提方法,仿真實驗中,目標類型是行人和車輛,目標的動力學模型為CV模型,目標的橫、縱向距離是融合數據。實驗表明,卡爾曼濾波可以顯著降低測量噪聲,且融合算法可以提高估計精度。
3 道路標志識別系統技術的研究[2]
標志識別在智能交通、智能汽車自主駕駛等領域有著重要的應用,對道路標志進行準確的檢測和識別,可以減少事故發生的可能性,確保行車安全(圖2)。

圖2 訓練圖集
作者Wang設計了一種基于OPSA點集距離和小波變換的道路標志識別方法,以提高輔助駕駛系統和無人駕駛安全。該方法主要包括三個階段:
(1)圖像去噪、恢復。采用中值濾波器對圖像進行去噪。中值濾波是一種非線性平滑技術,它將每個像素的灰度值設置為該點附近窗口內所有像素灰度值的中值,可以克服線性濾波產生的圖像模糊,有助于消除噪聲和脈沖干擾。中值濾波使用帶有奇數個點的滑動窗口來去除噪聲,不同圖像與不同要求時需要選擇不同的窗口大小和形狀。
(2)特征提取。特征提取是指從一組特征中選取一些最有效的特征,以達到縮小特征空間尺寸的目的。在特征提取階段,采用基于小波變換的特征提取識別方法,小波反映信號的細節,大尺度小波反映信號的輪廓,克服了傳統傅里葉特征提取方法的不足,保證了高頻信息不丟失,低頻信息不丟失。其中,對于二維圖像數據,將每一層小波變換分解為圖像的四個部分,分別表示近似低頻、垂直高頻、水平高頻和對角高頻部分的圖像。
(3)圖像識別。使用多個地標圖像來創建一個訓練集圖像庫,對所有圖像進行分解,并將低頻小波系數生成的圖像保存為特征圖像,創建特征圖像庫。然后,使用OPSA點集距離來識別圖像。
該方法實現了道路標志的精確識別,且具有較強的魯棒性,對駕駛輔助系統的研究具有一定的指導意義。
4 目標車輛狀態估計技術的研究[3]
前車檢測與跟蹤作為自主車輛環境感知系統的關鍵環節,在自主車輛環境感知系統中起著重要的作用。然而,目標車輛的一些關鍵狀態在所有駕駛情況下都難以直接準確地測量。
作者Li研究了一種利用攝像頭、激光雷達等多臺主機車輛傳感器收集的信息來估計目標車輛狀態的方法。具體步驟如下:
(1)建立一種基于Serret-Frenet方程的車輛動力學模型,用于解釋目標車輛的橫向運動。基于Serret-Frenet公式,在參考曲線上建立Serret-Frenet坐標系。前車的橫向狀態(如橫向速度、偏航角等)不能直接準確地得到,但是傳感器可以得到與車輛橫向狀態密切相關的可用狀態和測量值,從而估計車輛的橫向狀態。其中,車輛橫向運動模型及道路約束信息如圖3所示:

圖3 車輛橫向運動模型及道路約束信息
(2)在道路測量約束和車輛運動學模型的基礎上,設計神經網絡觀測器估計下一時刻車輛的橫向狀態。建立車輛橫向動力學狀態時間序列與道路約束的非線性映射關系,選擇目標車輛對道路中心線的側向偏移量、相對航向角、道路中心線和道路參考曲率作為神經網絡的輸入。采用貝葉斯正則化反向傳播訓練算法對目標車輛的橫向速度、偏航角和側偏角進行建模,調整權值以使真實值與神經網絡估計輸出值之間的誤差最小化。在Levenberg-Marquardt中加入貝葉斯正則化可以進一步提高RNN神經網絡的泛化性能。
在dSPACE實時計算機上進行CarSim/Simulink聯合仿真,驗證該方法的有效性。將改進的遞歸神經網絡估計方法與卡爾曼濾波和前饋神經網絡方法進行比較,可知神經網絡觀測器對目標車輛狀態的估計更為準確。因而,該方法對更好地識別自動駕駛中目標車輛行為有一定的指導意義。
5 車載雷達目標定位技術的研究[4]
毫米波車載雷達是智能駕駛輔助系統(ADAS)和自主駕駛系統中最重要的傳感器之一,該裝置通過處理發射信號和回波信號來檢測汽車周圍的目標車輛。由于基于奈奎斯特采樣原理的雷達信號處理方法的采樣率過高,范圍、速度和方位角的分辨率不能滿足高度自主駕駛的要求,尤其是方位角的要求。在空間域內,目標在車載雷達探測范圍內呈稀疏分布。針對這些問題,本章提出一種基于壓縮感知的車載雷達目標定位算法。
車載雷達如圖4所示,為了提高當前車載雷達的角度測量精度,采用了雷達天線的多輸入多輸出(MI?MO)結構。考慮車載雷達探測區域的距離-速度-方位聯合估計模型,基于目標在整個空間的稀疏分布圖,在估計目標的距離和速度時,將整個空間除以距離-速度網格。空間中不同的目標對應著距離-速度平面上不同的網格點。同時,估計目標的距離、速度和方位角時,還需要考慮方位角方向的維數,因此整個空間劃分網格離散化。為了得到稀疏的值列矩陣,采用稀疏的自適應匹配追蹤算法以重建信號與接收壓縮信號。
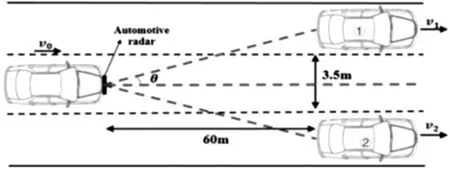
圖4 車載雷達場景
與傳統的雷達算法相比,該算法提高了目標的距離分辨能力和對相鄰目標的識別能力。在方位角估計方面,與MUSIC(多重信號分類)算法相比,壓縮感知能夠獲得更好的角度分辨率。
6 結束語
智能駕駛輔助系統(ADAS)是當前的研究熱點,基于相關技術解決了目標檢測、道路標志識別、自動駕駛狀態估計、目標定位等問題才更有助于ADAS技術的進一步發展。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48