基于無線多跳網絡的礦井搜救系統設計與實現
2018-10-11 09:14:56杜勝盛雷美珍連琴燕
制造業自動化 2018年9期
關鍵詞:系統
杜勝盛,雷美珍,連琴燕
(浙江理工大學 機械與自動控制學院,杭州 310018)
0 引言
煤炭是我國的主體能源,占我國能源生產總量的3/4。同時,我國也是煤礦災害事故最嚴重的國家。實際經驗表明,超過48小時后被困在廢墟中的幸存者存活的概率變得越來越低。因此,在發生礦難后,及時進行搜救非常重要[1,2]。但是,災后現場的環境復雜性、未知性及潛在的二次傷害等特點,使得救援人員無法第一時間在災難現場實施救援工作。因此,研發搜救機器人用于災后第一時間進入現場,獲取現場信息和探明被困者位置非常有必要[3,4]。
井下環境復雜,通信問題一直是搜救系統的一大難題。通信方式一般分為兩種:有線通信和無線通信。有線通信,加大了機器人的負載,而且在行進過程中容易被纏住[5]。傳統無線通信,雖然機器人可以靈活運動,但是具有傳輸距離短的缺點。本文設計一種基于ZigBee動態無線多跳網絡的通信方式,在無線信號衰減較快的地方放置ZigBee中轉站,以延長無線通信的距離,并通過設計一種具有搜救機器人和通信機器人的搜救系統對該通信方式進行實現。
1 搜救機器人和通信機器人設計
本搜救系統由搜救機器人和通信機器人兩種機器人組成。搜救機器人主要由運動控制系統、環境感知系統、信號燈和ZigBee通信系統組成,負責對井下環境的探測和被困人員的搜索。通信機器人主要由運動控制系統、紅外攝像頭系統和ZigBee通信系統組成,負責維持搜救機器人與控制中心的通信。
1.1 運動控制系統
為了適應礦井下的惡劣環境,運動系統采用履帶式行走機構。運動控制系統主要由無刷直流電機和電機驅動構成。此處的無刷直流電機,采用360BL99-230/430型號的直流無刷電機,其額定電壓為24V,額定功率為200W,額定轉速為3000RPM。此處的電機驅動,采用AQMD3610NS-A型號的BLDC驅動器,支持電機電壓9~36V,長時間可持續負載電流8A,最大負載電流10A,支持PWM調速(調壓)、恒轉矩調速(穩流)、自測速閉環調速(穩速)、外接測速發電機閉環調速(穩速)多種調速方式,極小的PWM死區,僅0.5us,PWM有效范圍:0.1%~99.9%。運動控制系統結構框圖如圖1所示。
1.2 環境感知系統
為了讓控制中心了解井下的環境狀況并搜索被困人員,在機器人上搭載多種傳感器,包括熱釋電傳感器、甲烷傳感器、溫度傳感器和CO傳感器等。
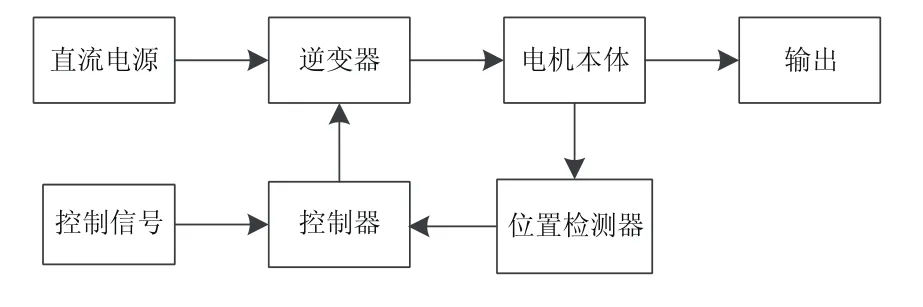
圖1 運動控制系統結構框圖
1)熱釋電傳感器:主要由傳感器探測元、菲涅爾透鏡、干涉濾光片和場效應管匹配器等幾部分組成,主要利用熱電效應原理來完成對紅外輻射的感應。本系統采用HC-SR501型號的熱釋電傳感器,采用德國原裝進口LHI778探頭設計具有靈敏度高,可靠性強的特點,能夠準確快速的探測到被困人員。其檢測原理框圖如圖2所示。

圖2 熱釋電傳感器檢測原理框圖
2)甲烷傳感器:采用ZC01-CH4型號的傳感器,其采用高穩定性燃燒式氣敏元件、高性能微電腦處理器,配合紅外遙控調校方式,是一款十分高性能的傳感器。額定電壓3.1~5.0V,誤差小于0.1%。其檢測原理框圖如圖3所示。

圖3 甲烷傳感器檢測原理框圖
3)溫度傳感器:采用DS18B20單線數字溫度傳感器,測量范圍為-55℃~+125℃,精度為±0.5℃,采用單總線接口方式,與微處理器連接時僅需一條線即可實現通訊。其檢測原理框圖如圖4所示。
4)CO傳感器:采用ZE07-CO型號的CO傳感器,利用電化學原理對空氣中存在的CO進行檢測,具有良好的選擇性,穩定性。內置溫度傳感器,可進行溫度補償,具有高靈敏度、高分辨率、低功耗,提供UART、模擬電壓信號、PWM信號等多種輸出方式。其檢測原理框圖如圖5所示。
1.3 信號燈和攝像頭
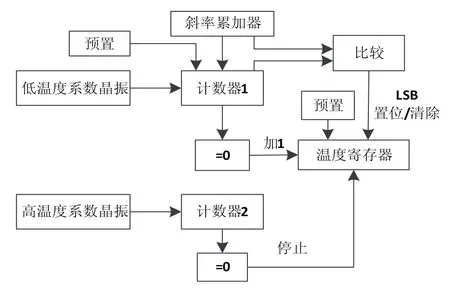
圖4 溫度傳感器檢測原理框圖

圖5 CO傳感器檢測原理框圖
在搜救機器人上搭載紅外信號燈,用于發送紅外信號。在通信機器人上搭載加有紅外濾光片的OV7725鷹眼攝像頭,用于獲取紅外信號燈發出的紅外信號,其分辨率為160×120,幀率為60幀,具有硬件二值化功能,可以減輕控制器的計算負擔,加快圖像處理速度。攝像頭的原理框圖如圖6所示。

圖6 攝像頭模塊原理框圖
1.4 ZigBee通信系統
常用的無線通信技術主要有Bluetooth、WiFi和ZigBee[6]等,考慮到Zigbee技術具有自主網和低功耗的特點,非常適合用于實現無線多跳網絡,故本系統采用ZigBee技術。本文采用CC2530芯片搭建ZigBee模塊,其電路原理圖如圖7所示。其工作頻段為2.4GHz,傳輸距離為1500米,通過串口接口與ARM控制器相連即可實現數據的收發功能,波特率最高可達115200bps。
2 搜救機器人和通信機器人編隊設計
本搜救系統由搜救機器人和通信機器人組成,搜救機器人通過搭載多種環境傳感器,熱釋電傳感器和攝像頭獲取井下的信息,通信機器人通過搭載多個ZigBee模塊,負責維持搜救機器人和控制中心的通信。為了減少工作人員的工作負擔,本文設計了一種搜救機器人與通信機器人編隊方式,使通信機器人自主跟隨搜救機器人運動。
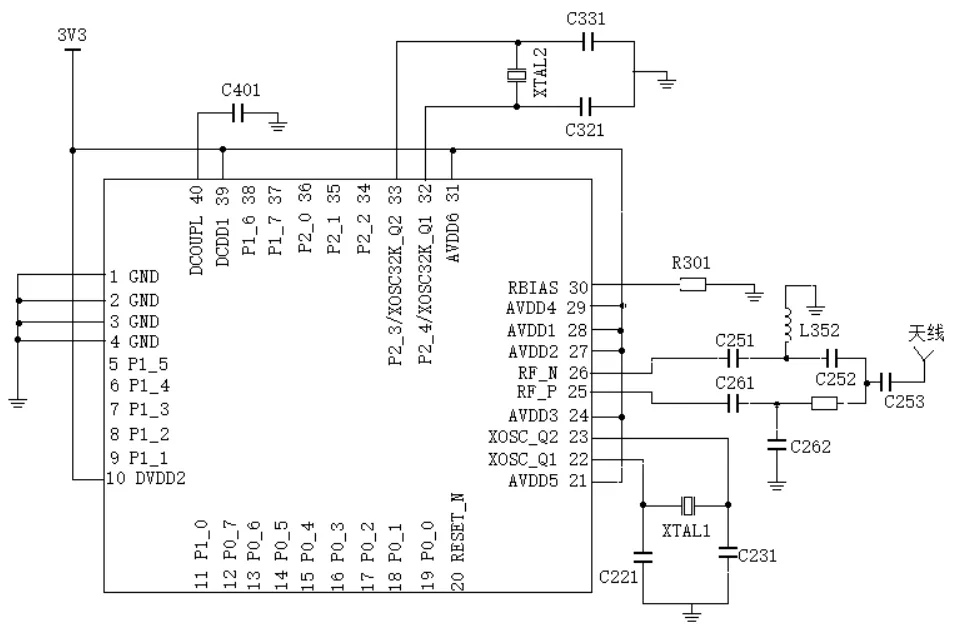
圖7 ZigBee模塊電路原理圖
通信機器人通過搭載加有紅外濾光片的攝像頭,濾除外界干擾,快速準確的獲取搜救機器人上搭載的紅外信號燈的圖像,如圖8所示。通信機器人通過圖像處理算法處理獲取的圖像,獲取兩個機器人的相對位置,如圖9所示。通過式(1)和式(2)計算左右輪的預期速度,然后通過增量式PID算法,如式(3)所示,調節通信機器人的運動方向與速度,實現對搜救機器人的跟隨。

式中Exp_L和Exp_R分別為通信機器人左右輪預期的速度,SearchR_Spd為搜救機器人的速度,Kx和Ky分別為橫向和縱向的常數,dx和dy分別為紅外信號距離圖像中心的橫向距離和縱向距離。

式中d_PWM是電機PWM的改變值,dd_e是上上次的誤差,d_e是上次的誤差,e是這次的誤差,Kp是比例系數,Ki是積分系數,Kd是微分系數。
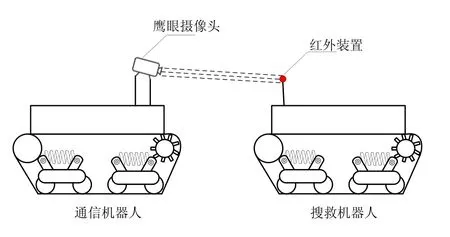
圖8 通信機器人與搜救機器人編隊圖

圖9 通信機器人獲取的圖像
3 通信網絡設計
礦井下環境復雜,搜救機器人的通信問題一直是一個大難題。通信方式從大的方面可分為有線通信和無線通信。有線通信方式具有通信距離遠,可靠性高等優點,但是其增加了搜救機器人的負載,且機器人容易被障礙物纏住。傳統無線通信方式具有通信距離短,可靠性低的特點。
針對有線和傳統無線通信存在的問題,本文提出了一種基于ZigBee動態無線多跳網絡的通信方式。當搜救機器人進入分支搜索時,通信方式如圖10所示。由于無線通信遇到障礙物時信號衰減很快,將通信機器人留在分支路口,ZigBee模塊具有自組網的特點,所以此時通信機器人充當中轉站,維持搜救機器人和監控中心的通信。當分支內還有分支時,通信方式如圖11所示。通信機器人會在第一個分支處放置一個搭載的ZigBee模塊,然后跟隨搜救機器人前進,留在第二個分支處維持通信。
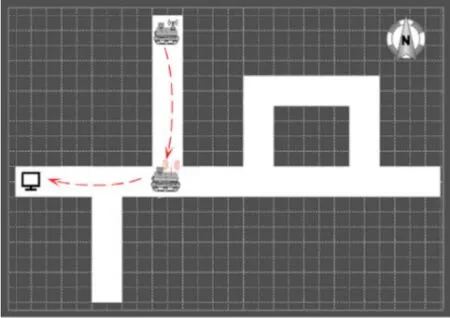
圖10 只有單個拐點時的通信方式
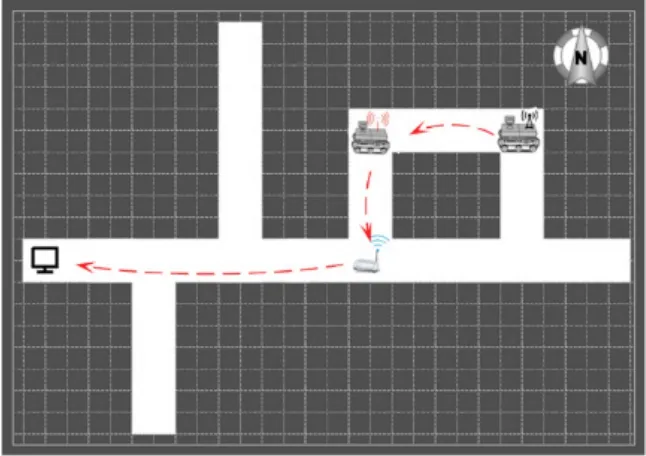
圖11 具有多個拐點時的通信方式
4 系統測試
為了驗證本文設計的搜救機器人和通信機器人的編隊效果和無線多跳網絡的通信效果,在地下車庫對本系統進行了測試。圖12和圖13分別為搜救機器人和通信機器人編隊效果測試和在拐彎處釋放中轉站搭建無線多跳網絡測試。經多次測試和參數調整,搜救機器人和通信機器人的編隊距離維持在1.5m~2m之間。在空曠處,ZigBee模塊的通信距離約為1200m,當存在直角拐彎時,不在拐角處放置中繼站,通信距離只能維持到拐角后100m左右的距離,在拐角處放置中繼站后,通信距離延長到拐角后1200m。
實驗表明,只要在合適的拐角處放置中繼站,搜救機器人就可全程與控制中心進行通信。

圖12 編隊測試

圖13 通信車釋放中轉站
5 結論
針對有線通信和傳統無線通信方式存在的問題,本文提出了一種基于ZigBee動態無線多跳網絡的通信方式,并通過設計一種具有搜救機器人和通信機器人的搜救系統對該通信方式進行實現。該系統中的通信機器人具有自主跟隨搜救機器人的能力,并在合適的地方充當中轉站或放置攜帶的ZigBee節點,實現搜救機器人在礦井下與監控中心進行較遠距離的無線通信。該通信方式對同類型機器人的設計和開發具有一定的參考價值和推廣價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
