高低軌異構雙基地SAR改進CS成像算法
2018-10-11 12:32:10王躍錕索志勇李真芳張金強張慶君
西安電子科技大學學報 2018年5期
關鍵詞:信號
王躍錕,索志勇,李真芳,張金強,張慶君
(1. 西安電子科技大學 雷達信號處理國家重點實驗室,陜西 西安 710071;2. 北京空間飛行器總體設計部,北京 100094)
地球同步軌道(Geosynchronous Earth Orbit,GEO)衛星合成孔徑雷達(Synthetic Aperture Radar,SAR)的地面覆蓋范圍廣,時間分辨率高,但空間分辨率低[1]; 而以地球同步軌道衛星作為主動照射源,低地球軌道(Low Earth Orbit,LEO)衛星被動無源接收地面散射信號的雙/多基協同體制,可實現高信噪比和高時空分辨率[2],且靈活性強、成本低、抗摧毀和抗干擾能力強,可實現輕型化、模塊化及商業化.因此,GEO-LEO雙基合成孔徑雷達(Bistatic SAR,BiSAR)體制與當前星載合成孔徑雷達系統相比,可顯著提高對地觀測能力,具有廣闊的應用前景[3].然而,目前國內外對該體制的研究尚處于起步階段,仍面臨許多技術難題[4].
星載合成孔徑雷達系統的諸多應用都是以合成孔徑雷達圖像為基礎的,因此研究適用于GEO-LEO BiSAR系統的成像處理技術勢在必行.文獻[5]針對地球同步軌道單基合成孔徑雷達系統的“走-停”假設進行了分析并給出補償方法,然而由于GEO-LEO雙基合成孔徑雷達系統中接收機的速度較快,文獻中的直線軌跡假設并不成立.此外,該系統在復雜雙基成像幾何關系下,回波信號在距離向和方位向都具有較強的空變性.文獻[6]提出一種大斜視下的同軌雙基合成孔徑雷達成像方法,然而該體制下不存在方位調頻率空變問題.文獻[7]提出了一種機載雙基頻域成像方法,但該方法只適用于直線軌跡,且成像范圍較小.文獻[8]提出了一種基于級數反演的雙基成像方法,然而其未考慮方位調頻率空變和保相性等問題.因此以上方法均不適用于GEO-LEO雙基合成孔徑雷達系統.
為解決上述問題,筆者針對GEO-LEO雙基合成孔徑雷達系統的成像處理技術做了深入研究,提出一種適用于該系統的基于二維時域擾動的改進線性調頻變標(Chirp Scaling,CS)成像方法.首先,建立雙基觀測幾何,推導出非“走-停”假設下的等效信號模型;然后,通過時域擾動的方式校正回波二維空變性,并對殘余相位進行補償;最后,通過仿真實驗驗證了該算法的有效性.
1 GEO-LEO雙基合成孔徑雷達系統信號模型
1.1 空間觀測幾何

圖1 GEO-LEO雙基合成孔徑雷達系統對地觀測幾何示意圖
建立GEO-LEO雙基合成孔徑雷達系統的觀測幾何,如圖1所示.坐標系為目標本體坐標系,即以目標位置為原點,目標所在的地球表切面為XOY平面,Z軸垂直于XOY平面指向地球表面外法線方向,X軸為低地球軌道衛星波束中心視線在XOY面的投影方向,Y軸由右手法則確定.地球同步軌道衛星在t時刻發射信號,此時高、低軌衛星的位置矢量分別為PG(t)和PL(t),速度矢量分別為VG(t)和VL(t),斜距矢量分別為RG(t)和RL(t); 經時延τ1后,信號到達目標位置,此時低地球軌道衛星位置、速度和斜距矢量分別為PL(t1)、VL(t1)和RL(t1); 信號經目標反射,時延τ2后到達PL(t2)位置,此時低地球軌道衛星速度和斜距矢量分別為VL(t2)和RL(t2).θG和θL分別為高、低軌衛星入射角,φ為雙基角在XOY面的投影,即雙基位置投影角,ψ為雙基速度投影角.
1.2 信號模型
在GEO-LEO雙基合成孔徑雷達系統中,由于信號收發時延長、接收機速度快,導致“走-停”假設不成立,且在信號傳播期間低地球軌道衛星速度矢量變化不可忽略.
設低地球軌道衛星在t時刻的加速度為aL(t),則非“走-停”假設下的目標到接收機的距離為
(1)
其中,c為電磁波傳播速度.由于信號在目標到低地球軌道衛星間的傳播時延τ2極短,該時間段內低地球軌道衛星速度的變化可忽略,因此可將式(1)重寫為
(2)
將式(2)在τ2處進行泰勒展開,并忽略高階微小項,可得
(3)
根據式(3),最終求得在某一時刻t下,非“走-停”假設下的雙程精確斜距模型為
(4)
為驗證式(4)的斜距模型,在X波段下采用表1參數進行仿真.衛星工具包(Satellite Tool Kit,STK)中觀測幾何如圖2(a)所示,斜距誤差如圖2(b)所示.在“走-停”假設下引入的斜距誤差隨時間呈線性變化,在 2 s 時間內引入約 20 m 的斜距誤差;而式(4)的非“走-停”斜距模型引入的最大相位誤差只有2.4°,可忽略不計.

表1 GEO-LEO雙基合成孔徑雷達系統的軌道參數

圖2 STK軟件中的高低軌觀測幾何示意圖和模型的誤差曲線
在GEO-LEO雙基合成孔徑雷達系統的異構雙基模型下,由于高低軌衛星軌跡非直線、非平行、非等速等原因,采用式(4)斜距模型進行成像算法的推導是非常困難的.考慮到GEO-LEO雙基合成孔徑雷達系統的合成孔徑時間與低地球軌道單基合成孔徑雷達的相當(秒級),短時間內地球同步軌道衛星斜距變化很小,可采用最小二乘算法[9]對式(4)進行等效單基擬合.等效后的單基斜距模型為

(5)
其中,Ve為單基等效速度,θe為等效斜視角,Re為等效波束中心斜距.仍采用表1中的仿真參數,在非“走-停”假設下等效單基斜距模型引入的相位誤差如圖2(c)所示,其最大相位誤差不超過3°,可忽略.
根據式(5)和駐定相位原理[10],GEO-LEO雙基合成孔徑雷達系統單點回波信號的距離-多普勒域表達式為
其中,σ為復常數,λ為波長,pr(·)和Wa(·)分別為信號距離向和方位向包絡,R0為目標最近斜距,Km和D(fa,Ve)分別為多普勒域信號的調頻率和徙動因子.Km和D(fa,Ve)的表達式為
(7)
其中,Kr為發射信號的調頻率.根據推導的GEO-LEO雙基合成孔徑雷達系統斜距模型,筆者建立了單點目標的等效距離-多普勒域信號模型.但對于場景中的不同目標,由于真實雙基斜距歷程變化,造成其等效速度不同.
傳統的線性調頻變標成像算法[11]是針對單基合成孔徑雷達體制提出的,其首先對距離徙動(Range Cell Migration,RCM)進行補余校正和一致校正,再對距離向和方位向分別做匹配濾波,實現二維合成孔徑雷達聚焦.然而,這是以場景中所有目標的等效速度相同為前提的,因此并不適用于GEO-LEO雙基合成孔徑雷達系統.
2 GEO-LEO雙基頻域成像處理方法
在GEO-LEO雙基合成孔徑雷達系統觀測模型下,場景中不同目標的等效速度不同,導致傳統的線性調頻變標算法無法精確聚焦.筆者針對該問題提出一種基于二維時域擾動的改進線性調頻變標成像算法,可校正由于等效速度不同造成的距離徙動空變和方位調頻率空變,實現高分辨率寬幅場景的良好聚焦效果,且具有較好的保相性能.
2.1 距離向時域擾動
根據式(6),以中心斜距目標為參考,GEO-LEO雙基合成孔徑雷達系統精確的距離徙動差量可表示為
ΔR=2{R0[1/D(fa,Ve)-1/D(fref,Ve)]-Rref[1/D(fa,Vref)-1/D(fref,Vref)]} ,
(8)
其中,Rref和Vref為參考目標的斜距和等效速度,fref為參考多普勒頻率.仍采用表1中的參數,30 km× 30 km 場景的最大距離徙動差量如圖3(a)所示.經計算,ΔR在每一距離門內所有的方位位置滿足
max|2R0[1/D(fa,Ve)-1/D(fref,Ve)-1/D(fa,V)+1/D(fref,V)]|?δr/4 ,
(9)
其中,V為某一距離門內方位中心處目標的等效速度,δr為距離分辨單元(取1 m).因此,ΔR隨方位向變化很小,可忽略[12].此外,由圖3(a)可知,ΔR與R0呈線性變化,且在高分辨時不可忽略.根據線性調頻變標原理[12],可采用時域擾動的方式進行補余距離徙動校正.將式(6)乘以如下線性調頻信號:
H1(τ)=exp{jπKp[τ-(2Rref/c)/D(fa,Vref)]2} ,
(10)
其中,Kp為該信號的調頻率.再在距離頻域乘以如下匹配濾波器:

(11)
經上述頻率調制和距離向的脈沖壓縮后,與參考目標位置間隔Δr的目標將產生平移,移動量為
(12)
不難發現,該移動量即為補余距離徙動值,即Δrmove=ΔR.將式(8)寫為
ΔR≈2m(R0-Rref)[1/D(fa,Vref)-1/D(fref,Vref)] ,
(13)
其中,m為常數,可通過式(8)與式(13)線性擬合得到.這樣,可求得變標信號式(10)的調頻率為
Kp=mKm[D(fref,Vref)/D(fa,Vref)-1]/[(1-m)D(fref,Vref)/D(fa,Vref)+m] .
(14)
此時信號具有一致的距離徙動.需要說明的是,時域變標會引入二次殘余相位[13],可在距離向處理后予以補償.一致距離徙動校正函數H3和二次殘余相位補償函數H4分別為
(15)
2.2 方位向時域擾動
由于在同一距離門內目標的等效速度隨方位向空變嚴重,故無法采用統一的匹配濾波器聚焦.針對該問題,此處通過數值擬合的方式,給出一種基于時域調頻率擾動的方位向非線性處理方法.

圖3 30 km場景目標的最大距離徙動差量和二次相位誤差值曲線
對于每一距離門Rbi,以方位中心時刻tref為參考,通過雙基合成孔徑雷達定位的方式設置一組方位ti時刻的目標,可計算得到該距離門內不同方位位置與方位向參考中心位置目標的方位調頻率差為
ΔKa(Rbi,ti)=Ka(Rbi,ti)-Ka(Rbi,tref) ,
(16)

EQPE=π ΔKa(Rbi,ti)(Ta/2)2,
(17)

H5=exp[-j2π(n1t3/6+n2t4/12)] .
(18)
將距離向處理后的信號在方位時域乘式(18),使每一距離門內目標有一致的方位調頻率,再在距離-多普勒域采用下述方位匹配濾波器,完成方位壓縮:
H6=exp[-j4πR0D(fa,V)/λ] .
(19)
此外,由式(18)可知,方位擾動函數是t的高階多項式,因此在校正調頻率空變的同時會引入一些給成像質量帶來負面影響的相位誤差.對方位時間為t的目標,將式(18)在其合成孔徑時間內進行泰勒展開,可獲得殘余相位.首先,根據時頻對應關系,每一距離門的殘余高次相位誤差補償公式為
H7=exp{j2π[n1(fa/Ka(Rbi,tref))3/6+n2(fa/Ka(Rbi,tref))4/12]} .
(20)
其次,考慮到算法的保相性,需在時域補償殘余常數相位,補償公式為
H8=exp[j2π(n1t3/6+n2t4/12)] exp[-jπ(n1t2/2+n2t3/3)2/Ka(Rbi,yref)] .
(21)
2.3 算法流程
筆者針對GEO-LEO雙基合成孔徑雷達系統提出了一種基于時域擾動的改進型線性調頻變標成像算法,完整的算法流程如圖4所示.

圖4 GEO-LEO雙基合成孔徑雷達系統的改進型線性調頻變標成像算法
3 仿真實驗結果
為驗證筆者提出的GEO-LEO雙基合成孔徑雷達成像算法,采用表1和表2中的參數,設置 28 km× 28 km 場景下均勻布置的 5×5 點陣目標進行仿真驗證,其在地面場景中的分布如圖5(a)所示,成像結果如圖5(b)所示,部分點目標的成像質量指標如表3所示.從成像結果可看出,各點目標在距離向都可實現很好的聚焦,峰值旁瓣比約為 -13.25 dB,積分旁瓣比約為 -10.28 dB; 方位向越靠近場景中心,聚焦效果越好,場景邊緣目標旁瓣會有輕微抬高,但都低于 -11.5 dB,這可在成像處理中通過加窗的方式予以降低; 各點目標聚焦后的殘余相位誤差最大不超過8°,可滿足后續處理(如干涉測高)的需求.

表2 系統參數
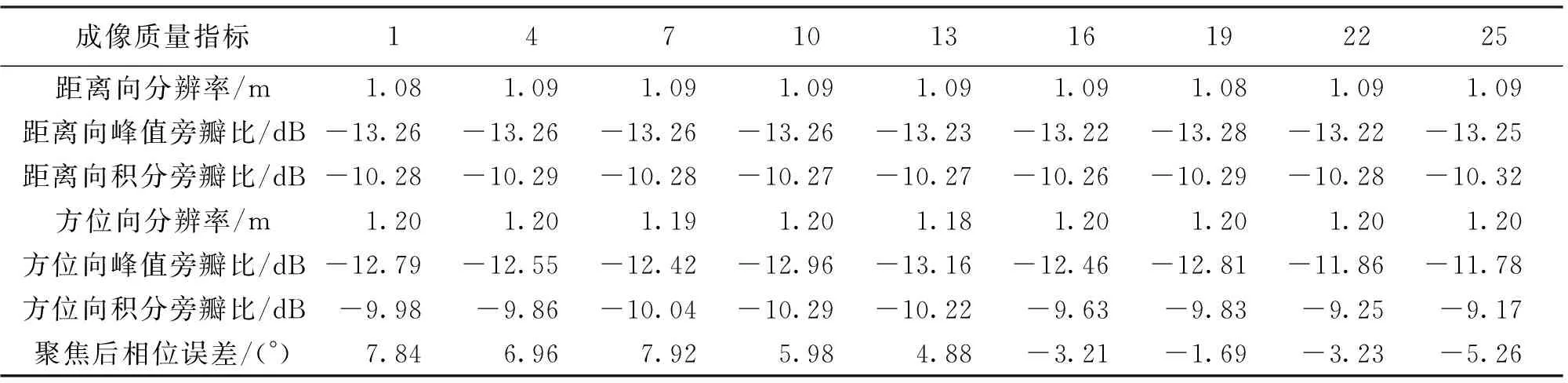
表3 部分點目標的成像質量指標
需要說明的是,由于雙基成像幾何影響,使場景中同一距離上的不同目標,在成像結果中處于不同距離門,可通過幾何校正的方式予以糾正[13],但這超出筆者的研究范圍,這里不再贅述.

圖5 28 km×28 km場景下5×5點陣目標的分布圖及成像結果
此外,部分點目標的傳統線性調頻變標成像方法[11]與筆者提出方法的成像結果對比如圖6所示.在方位向邊緣處(目標1、15),由于調頻率空變嚴重,使得傳統線性調頻變標方法嚴重散焦;在距離向邊緣處(目標3),由于等效速度空變,使得傳統線性調頻變標方法的補余距離徙動不精確,會有輕微散焦;而筆者提出的成像算法對各目標都可實現良好的聚焦.

圖6 部分點目標的傳統線性調頻變標方法與筆者提出方法成像結果的對比
4 結 束 語
筆者針對GEO-LEO雙基地合成孔徑雷達系統的成像處理,提出一種基于二維時域擾動的改進型線性調頻變標成像算法.根據雙基觀測幾何,建立了非“走-停”假設下的等效單基斜距模型.基于該模型通過二維時域擾動的方法校正回波的距離徙動空變和方位調頻率空變,并對殘余相位進行補償.該算法可實現GEO-LEO雙基合成孔徑雷達高分辨率寬幅場景的良好聚焦,且具有很好的保相性能.仿真實驗驗證了該算法的有效性.這項研究成果可有效地推動我國未來GEO-LEO雙基合成孔徑雷達系統成像技術的發展.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
