基于UWB的消防員火場定位系統研究
2018-10-12 08:06:06李佳琦
無線互聯科技 2018年18期
李佳琦,李 森
(鄭州輕工業學院,河南 鄭州 450001)
消防員擔負著滅火的重要職責,但是由于大型建筑的構造往往十分復雜,當消防員需進入火災現場時,往往會因為不熟悉建筑構造而迷路,對消防員的人身安全造成威脅,造成不必要的損失,對消防員進行室內的準確定位技術能夠實時掌握消防員的位置及運動軌跡,能夠在消防員遇險時及時找到目標,也更有利于進行救援工作。
目前,對人或物的位置感知主要通過全球導航衛星系統(Global Navigation Satellite System,GNSS),如GPS,伽利略,北斗等定位技術來實現[1],但在室內環境中由于信噪比(Signal Noise Ratio,SNR)和多路徑傳播較低易導致GNSS失敗,定位效果降低。尤其在火場環境中煙霧、水汽重,房間隔板、金屬結構、家具以及容易混淆的傳感器等造成信號散射及多徑效應明顯,對定位系統的穿透力、抗干擾能力、續航能力均有較高要求。目前多數常見的定位系統,如紫蜂協議(ZigBee)技術、射頻識別(Radio Frequency Identification,RFID)技術、紅外線定位技術、藍牙定位技術等在火災環境中受惡劣環境影響較大,定位能力喪失或定位精度不能達到使用要求。在此背景下,超寬帶(Ultra Wideband,UWB)定位由于依據其特殊的定位機制,即使在火場復雜情況下依然能保持較好的定位特性[2]。因此,利用UWB定位系統對消防員進行定位,能夠克服其他定位系統的缺點,提高消防員的安全機制。
1 UWB定位簡述
UWB信號是指通信頻段處于3.1~10.6 GHz的信號,其絕對帶寬大于500 MHz或相對帶寬不小于0.2[3],UWB技術最初被稱為“基帶脈沖”,是一種能夠遠距離傳輸的無線技術。UWB也可以稱為非正弦通信技術和脈沖無線電。不用于其他通信技術,它在接收器(天線)與發射器(有源電池供電標簽)之間通過非常窄的只有納秒及以下寬度的射頻脈沖來傳輸數據,UWB自動生成一個非常寬的帶寬,覆蓋范圍廣,能夠與其他電臺共存且干擾較小[4]。
UWB技術近年來在戶外/室內位置估算方面引人矚目,許多公司如Ubisense,DecaWave和BeSpoon研發的定位模塊最高能達到10 cm的精度,視距范圍最高可達880 m,同時,BeSpoon開發的微型IR-UWB系統能夠將UWB技術成功集成到智能手機中,實現了定位系統更便攜的操作[5]。
目前應用于火災環境的定位方式及系統鮮有人研究,UWB技術相較于其他定位方式在此類特殊環境中更具有優勢。UWB定位系統由于依據極窄的射頻脈沖來傳輸數據,具有良好的穿透力和抗多徑能力,能夠更好地克服惡劣環境對信號傳播的影響。UWB系統標簽功耗只有5 mW,極低的功耗使系統能夠進行長時間的工作,尤其是在火場的復雜環境中,不需考慮更換電池等問題。同時,由于UWB信號非常大的帶寬,帶來了非常高的時間分辨率,有助于實現高精度測距[6]。
2 火災定位系統
在UWB定位系統中,一個完整的定位系統包括:(1)處理包括圖形用戶界面的計算機和集線器。(2)至少4個不同的高度UWB基站用于記錄視場中的實時三維信號數據。(3)低功耗和高功率的UWB標簽作為被測量對象。(4)CAT-5e屏蔽線。
定位模塊可采用DecaWave公司開發的DWM1000模塊,作為一種高效的定位模塊,通信速率高達6.8 Mb/s,其最大定位距離可達100 m。支持高標簽密度,20 m半徑內標簽節點的密度可達11 000個[7],因此,即使對多個消防員同時進行定位也不會互相干擾。
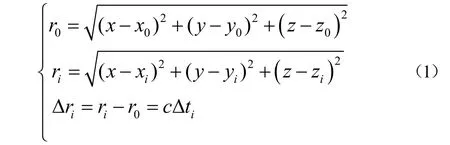
DWM1000模塊支持到達時間差(Time Difference of Arrival,TDOA)定位方式,按照TDOA定位方式,在三維空間中,至少由4個基站對一個標簽節點進行定位,通常選擇其中一個為主基站,另外3個為從基站。定位目標在移動過程中與基站之間的距離差為常數,其軌跡為雙曲面,定位目標位于雙曲面交點處。假設主基站BS0(x0,y0,z0),從基站BSi(xi,yi,zi),i=1,2,3…,標簽MS(x,y,z),依據TDOA原理,公式如下:
此定位方式因為不需要昂貴的天線陣列,不必保證基站和目標之間的時鐘嚴格同步,只需保證各基站之間的時鐘同步即可[8],而實現基站之間時鐘同步的難度遠小于實現基站與定位目標之間的難度。不需要知道傳輸的絕對時間,降低了硬件和操作難度,有利于減小計算誤差,在實際中TDOA算法的應用更為廣泛。
火災發生時,為保證供電安全,需切斷電路,保留消防用電,普通的定位系統因失去供電而無法工作,曹祥紅等[9]提出將定位基站安裝于消防應急標志燈具中,供電和信號傳輸均與消防聯動控制線共用,能夠在發生火災時保證模塊的供電、信息傳輸功能和聯動功能,同時能夠節省空間,減少安裝成本。以某辦公樓一層建筑為例,建筑中應急標志燈具按照設計規范安裝于走廊、大廳、樓梯、安全出口等位置。圖中多個應急標志燈具同樣位置均在高度2.2 m處有應急照明燈具,高度0.3 m處有消防疏散指示燈,因此燈具在二維圖中呈現重疊效果。發生火災時,消防員作為定位目標移動于走廊中,手持移動標簽與安裝于應急標志燈具中的基站進行信號交換,基站通過TDOA方法計算出消防員的位置坐標,通過消防聯動控制線傳輸至中央控制臺。在消防員搜救過程中控制臺可通過設備直觀看到消防員的位置和移動軌跡,在遇險時能夠及時對其進行援助,同時也能更好地指揮消防員展開救援工作。
3 基站布局分析
3.1 基站布局方式
在實際應用中,因為地形限制以及加入定位模塊的消防應急標志燈具的成本相較于普通消防應急照明燈具大幅度提高,消防應急標志燈具在實際的安裝建設中并不一定每個燈具都要安裝定位模塊[10]。同時由于TDOA定位方式得到的系統定位精度受基站的布置方式影響較大,基站不合理分布會造成感知陰影和盲點,因此,需要在基站的布置方式以及網絡感知覆蓋率之間達到平衡[11]。
按照TDOA定位方法,至少需要4個基站對一個移動標簽進行定位,通常基站的布局方式有Y型、菱形、倒三角形等[12],以上述辦公樓為例,結合本建筑結構及應急標志燈具位置,可采用倒三角形布局方式,如圖1所示,在建筑平面圖中,以最左側和最下方軸網分別作為x軸和y軸建立坐標系,選取按照倒三角形結構安裝定位模塊的應急標志燈具分別為位于走廊中部的3個疏散指示燈以及位于大廳的疏散指示燈,坐標分別為(18.0,9.6,0.3),(32.5,9.6,0.3),(47.0,9.6,0.3),(28.8,4.0,0.3),單位為m。由于火場環境復雜,DWM1000定位模塊保守估計按照50 m的定位距離進行計算,以所選基站為圓心作半徑為50 m的圓表示信號傳播范圍,信號覆蓋效果如圖2所示,可以看出,建筑公共區域能夠被每個基站覆蓋在信號傳播范圍內,因此能夠滿足定位需求。
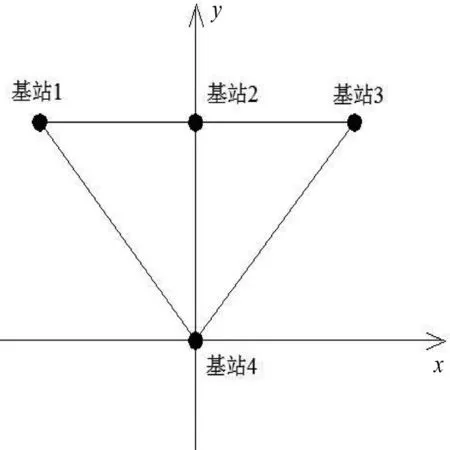
圖1 倒三角形基站布局示意
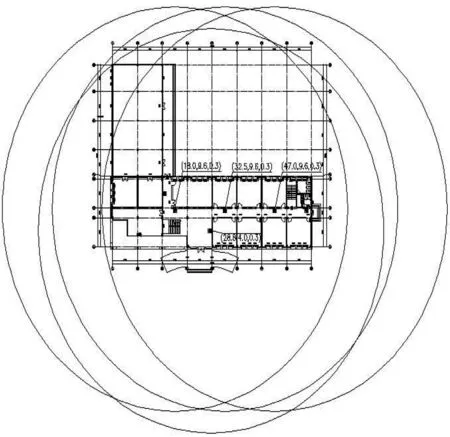
圖2 基站布局及基站信號覆蓋效果示意
3.2 定位精度分析
GDOP為精度的幾何稀釋,原本用于分析GPS定位系統中衛星在坐標結構范圍內對星座的GDOP和相應的定位誤差[13]。在無線定位系統中,GDOP值可用來判斷基站位置對定位精度的影響。GDOP值越小,定位精度越高,依據TDOA算法[14]求得GDOP表達式如下。
對式(1)
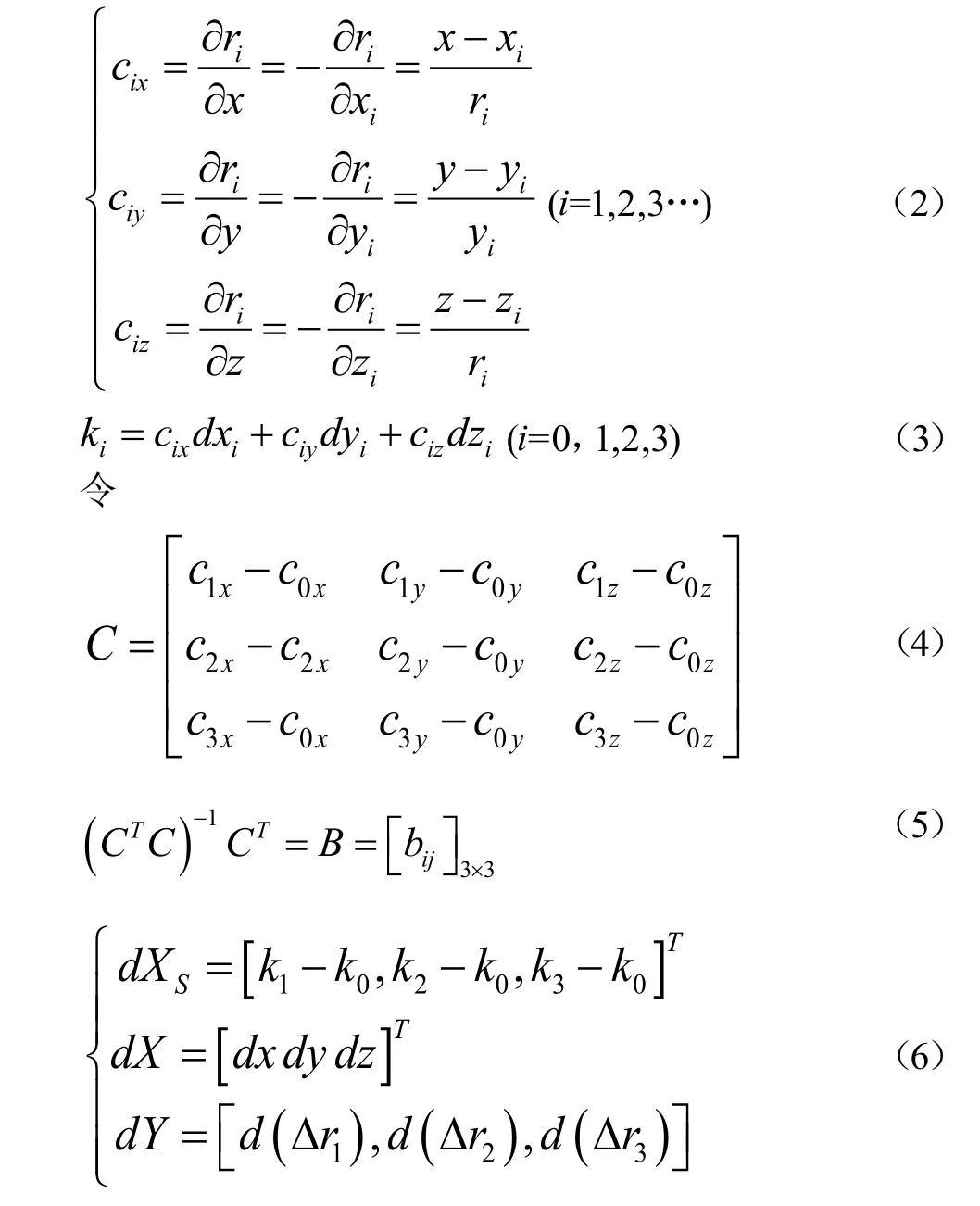
目標估計的定位誤差可以通過偽逆技術來評估:

假設修正后的測量誤差為零,基站位置誤差相互獨立,則位置誤差協方差可表示為:
依次選擇4個基站分別為主基站,并以此對所選基站方案的定位精度進行仿真,定位范圍為消防員在建筑中活動的公共區域x∈[14.4,57.6],y∈[0,16.8],考慮消防員移動時將定位標簽攜帶在腰部,標簽高度取z=1.2。仿真結果如圖3所示。
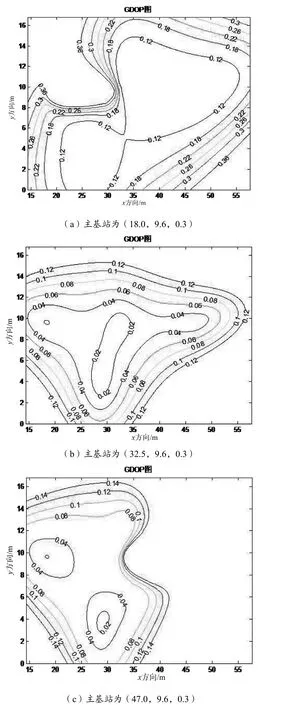
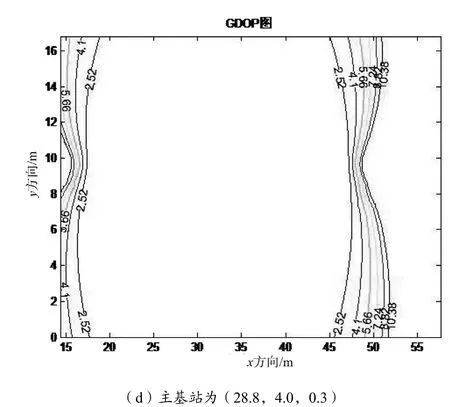
圖3 不同主基站選擇下的GDOP值
由圖3可以看出,當選取基站不同時,定位精度也具有較大差異,且在倒三角型布局模式中,只有當主基站位于中間被其他3個基站圍繞的位置時,即圖1中主基站位于“基站2”位置時定位精度能夠在定位范圍內均勻分布。由3(b)圖可以看出,文獻所提出的UWB定位系統基站布局方案能夠達到較好的精度,滿足消防員在火災環境中的定位需求。
4 結語
由于消防員工作環境復雜,對消防員進行定位存在必要性,UWB技術在火災現場復雜環境中能夠克服惡劣環境影響,具有極大的定位優勢。UWB定位系統能夠將定位模塊安裝于應急標志燈具中,保證在火災發生時的正常用電,提高了定位系統的安全機制。GDOP值可用來分析定位基站布局的精度,論文分析了在建筑實例中定位基站以倒三角形的安裝方式的精度,并對GDOP值進行仿真,在選取合適主基站的情況下精度值表明此方案完全可行。
火災現場作為一種特殊的情況,仍有許多因素限制定位的能力與精度,UWB定位技術能夠幫助消防人員更高效地展開人員調度及營救工作,減少消防人員因不熟悉救援環境造成的傷亡,降低惡劣環境對消防員的生命威脅。隨著UWB技術研究的深入,其技術和標準也越來越成熟,已取得了巨大的進步。其超寬的帶寬和其獨有的通信特點決定了超寬帶定位系統在室外、室內等各種環境下均能得到較好的應用。
