平板閘門精確控制信號改造
2018-10-12 05:47:56文興
中國設備工程 2018年19期
文興
(金平國能電冶開發有限公司,云南 紅河州 661500)
目前隨著集控運行方式的推廣,很多采用平板閘門的電站和水庫對平板閘門都開始逐步實現遠程控制改造。但實現遠程控制閘門非常重要的全開位和全關位、閘門實際開度量采集,現在的技術幾乎都是通過卷揚機中間軸的轉動來實現。這種對開關量和模擬量的采集誤差大,只能適合現地控制,如果是遠方控制很可能出現因采集量誤差,開關位置動作不正確而發生閘門失控現象。由于很多電站大壩值守人員文化水平低,只能適應簡單的操作,沒有緊急事故處理的能力。
目前已經發生很多起閘門沖頂的事故案例值得我們反思。為確保遠方操作能準確控制平板門,結合平板門特點對平板門的位置信號和開度信號進行了技術改造。改造后的控制信號能準確反應閘門工作狀態,并且通過現場的機械指示可清楚地知道閘門真實開度。
1 閘門全開位置的實現
為準確得到閘門的全開位置,在閘門下部焊接一個限位桿(限位桿根據全開實際位置焊接),當限位桿動作行程開關時,將閘門全開點信號輸送給控制柜和遠控PLC,如圖1。
遠程操作時最主要的極限位置信號必須可靠。為確保閘門全開位和全關位時閘門位置信號可靠動作,以前由軸上連接的限位行程開關還是接入閘門現地控制柜里面,調節位置信號時稍稍比實際過一小點。新安裝的閘門全開位和全關位行程開關動作信號就接入遠程控制PLC。這種冗余配置確保了閘門遠程操作極限位置動作的可靠性。

圖1 閘門上限位安裝圖片
2 閘門全關位和現場實際開度的實現
如圖2所示,閘門下限位的實現是通過在閘門頂上焊接一根向上的鋼管,最上面焊接一個限位塊。當閘門達到全關位置時,限位塊動作于行程開關將閘門全關位置上傳。該信號在PLC編程過程中當全關位動作后一定要延時1秒讓閘門電機停止工作。這樣做的目的是確保全關位置時鋼絲繩處于松弛狀態,鋼絲繩不長期受力。

圖2 閘門全關位和現地直觀開度尺
目前平板閘門都是通過和軸連接的編碼器以數顯表的形式來實現閘門開度。但這個開度是否準確,現場運行值班人員無法判斷。我們曾發現好幾起閘門開度和顯示不對應的情況。為準確判斷閘門的實際開度,我們在閘門下限位限位桿上安裝了一條反方向的刻度尺,通過指針指示刻度尺的數據準確顯示出閘門的實際開度。
3 閘門開度準確實現
以前閘門開度采用的是和軸連接的編碼器來實現,因為是通過比較大的轉比換算,實際顯示的誤差大,不能作為控制信號精確地遠控閘門。為了使閘門開度準確,我們根據閘門軸旋轉做了一個非常復雜的計算過程并寫入了PLC里面。但實際運行過程中因機械結構問題還是存在一定的誤差,不能準確測量出閘門的實際開度。為得到可靠的開度信號,直接將閘門開度采集器改為拉線式位移傳感器,反應閘門開度的拉線跟閘門同時運動,準確反應出閘門實際開度(如圖3、4所示)。
4 結語
通過現場技術改造和實際運行,閘門信號能準確上傳到監控系統,確保閘門可靠控制。為保證閘門動作的可靠性,我們還在閘門遠程操作的過程中增加了工業視頻監控。為防止因操作閘門的接觸器觸點粘連、閘門失去控制等情況發生。將閘門供電的總電源開關器改成可以遠程控制的斷路器,該斷路器直接安裝在有人值班的中控室外。當緊急情況發生時,直接斷開閘門總電源,確保現場設備安全。此項技改方案是在實際工作中總結出來的經驗,沒有高深的技術含量,但打破了傳統平板門信號采集的思路。動作可靠是實現平板門遠程操作的有力保障。

圖3 現場安裝的拉線式位移傳感器
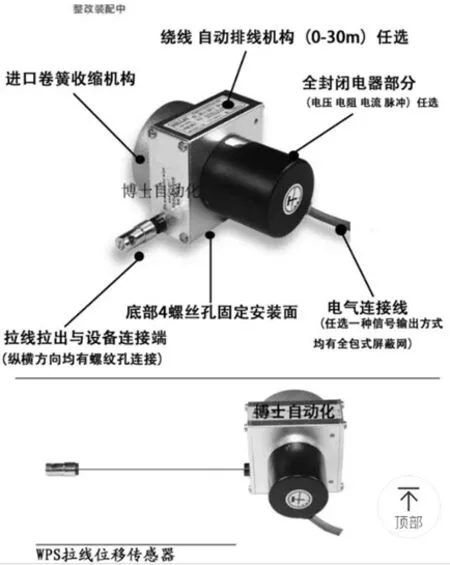
圖4 拉線式位移傳感器廠家安裝圖
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00