臨近空間太陽能飛翼無人機氣動性能設計仿真
2018-10-18 10:10:32,
計算機測量與控制 2018年10期
關鍵詞:設計
,
(1.中國科學院 光電研究院,北京 100094;2.中國科學院大學,北京 100049;3.中國科學院 高能物理研究所,北京 100049)
0 引言
臨近空間太陽能無人機是指以太陽能作為能量來源、以螺旋槳作為推進系統、依靠氣動升力進行飛行的、飛行高度多位于18km以上的臨近空間領域的電動無人駕駛飛行器[1-2],其飛行環境不同于傳統飛行器,位于距地面20~100公里的臨近空間空域[3]。臨近空間的飛行環境,具有空氣相對稀薄、環境壓力低、風速變化大、太陽輻射強等特點。臨近空間太陽能無人機作為一種新興的飛行器,具有大巡航高度、長航時、大尺寸以及安全性好的特點。它可作為多種任務平臺,如氣象探測、通訊中繼,互聯網覆蓋等[4]。
目前,臨近空間無人機多采用傳統常規布局,由于臨近空間環境的特點,無人機飛行環境空氣密度小,對發動機的工作效率產生限制,并且現階段光伏材料能量轉換效率低[5],能量供應有限,因而無人機的速度通常較低,飛行雷諾數較傳統飛機低1~2個量級,飛行動壓較小,其氣動性能較差,且傳統常規布局無人機外表不夠平整,僅機翼可鋪設太陽能電池,因而在臨近空間太陽能無人機的能量供給上存在一定的限制,從而也限制了無人機的載荷攜帶以及無人機的任務需求。為改善臨近空間太陽能無人機特性,除了選用氣動性能更好的布局形式,也需保證其可增大太陽能電池的鋪設面積以確保能量供應。
本文設計了一種大展弦比的臨近空間太陽能飛翼無人機。相比目前常見的常規布局無人機,飛翼布局無人機具有較輕的結構重量、較好的氣動特性等優勢[6-7]。在總重相同的條件下,飛翼布局無人機較輕的結構使得其能夠攜帶有效載荷,從而可使得無人機的任務更為多樣化。臨近空間太陽能無人機采用太陽能供能,需在其表面鋪設太陽能電池,受目前太陽能電池自身特性的限制,無人機表面需盡可能的平坦,飛翼布局無人機在這一問題也具有較大優勢,翼身一體化的布局形式,使得無人機全機表面均可鋪設太陽能電池,從而在能量的供給上也優于傳統常規布局的無人機[8]。此外,在考慮了臨近空間飛行器低雷諾數[9]的特點后,選取了適用于飛翼布局無人機的低雷諾數反S翼型,并采用翼梢外洗設計來改善飛翼無人機的穩定性[10],以期得到更為優化的氣動性能。
1 飛翼氣動布局設計與仿真方法
1.1 飛翼布局設計原理
飛翼布局無人機無尾,機身與機翼融為一體,飛行時的升力大,阻力小,升阻比高。飛翼布局無人機所承受的全部重力基本上是沿展向分布的,與機翼的氣動載荷分布情況基本一致,而不像常規布局飛機那樣,重力主要集中在飛機中部,機翼要承受很大的彎曲載荷,因而飛翼布局無人機結構重量也比較輕[11]。此外,無尾的設計也有利于提高飛機的隱身性[12]。根據對飛翼布局氣動特性的分析,在進行飛翼布局無人機設計時應注意:
巡航升力系數和縱向靜安定度不能過大,由于飛翼布局無平尾和垂尾,因此其舵面效能較低,若使用過大的巡航升力系數會帶來打的低頭力矩,導致配平困難及配平阻力的增加,而過大的縱向靜安定度則使無人機在非配平狀態下需要較大的偏轉角度,其相應會帶來阻力的增加,導致升阻比下降[13]。
在飛翼布局無人機的減阻方面,由于飛翼布局采用了一體化設計原則[14],其浸潤面積大大減小,因此其設計本身即可大幅度降低了摩擦阻力;對于誘導阻力,傳統方法是增大展弦比和對環量進行控制,設計中為更加適用于臨近空間,采用了大展弦比,并采用根梢比2.2的設計[15],使得環量沿展向盡量成橢圓形最佳分布,從而減少了誘導阻力;此外,對于干擾阻力,其主要是因部件之間的相互響而產生的,飛翼布局采用了無尾設計,并采用翼身一體化結構,故而該項阻力可大幅度降低。
根據文獻調研[16],飛翼布局形式飛機升阻比范圍如下:低速和亞聲速可達15~18,跨聲速可達10~12,最大馬赫數為2的超音速飛機約為4~8。
本文所設計的臨近空間太陽能飛翼無人機的展弦比為25,翼展為60 m,設計思路為:首先通過仿真分析,優選出適合臨近空間飛行特點且適用于飛翼布局的反S型低雷諾數翼型,通過布置升阻特性良好的翼型,并進行適當的幾何扭轉即翼梢外洗設計,以提高全機氣動性能。
1.2 翼型選擇
根據臨近空間飛行器低雷諾數特性,并考慮飛翼無人機穩定性要求,本文中選取適合于低雷諾數的反S翼型。分析幾種低雷諾數翼型[17],由圖1、2的結果,根據分析結果,選擇翼型NACA 8-H-12,該翼型為反S翼型,俯仰安定性好,且升力系數不會過大而影響無人機配平,適用于翼身一體化的飛翼布局使用。
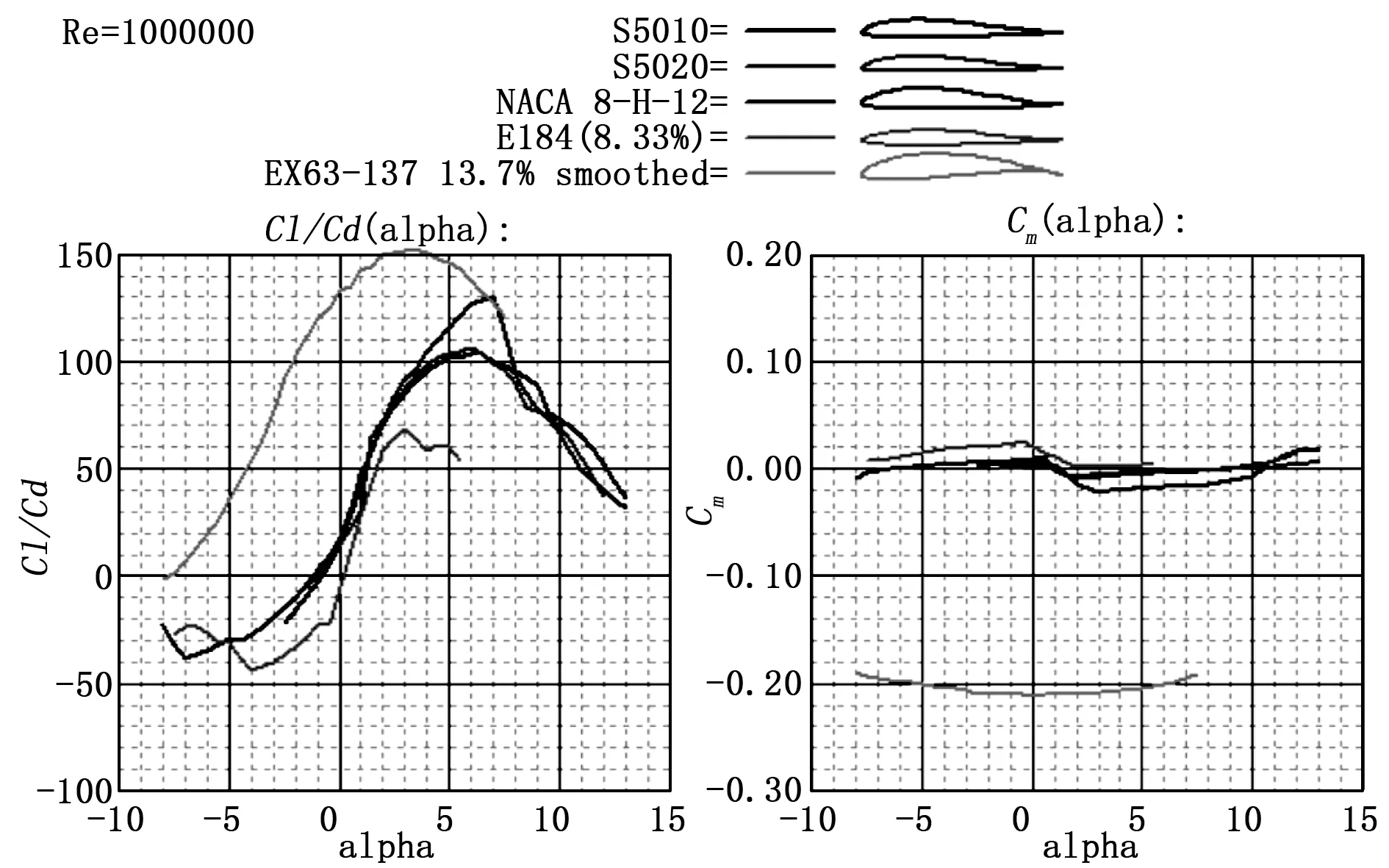
圖2 低雷諾數反S翼型分析(b)
1.3 飛翼氣動布局研究模型
在對太陽能無人機進行飛翼布局設計時,為使得無人機翼身一體化,氣動性能更佳,采用內外機翼無機身模型[18],如圖3,即將飛翼中間厚度較大的部分作為內段機翼,外側厚度較小的部分作為外段機翼,使得整個無人機成為一個巨大的升力面,并在翼梢采用外洗設計,以改善飛翼無人機的穩定性,以期得到最佳的氣動特性。具體氣動布局如圖4所示。
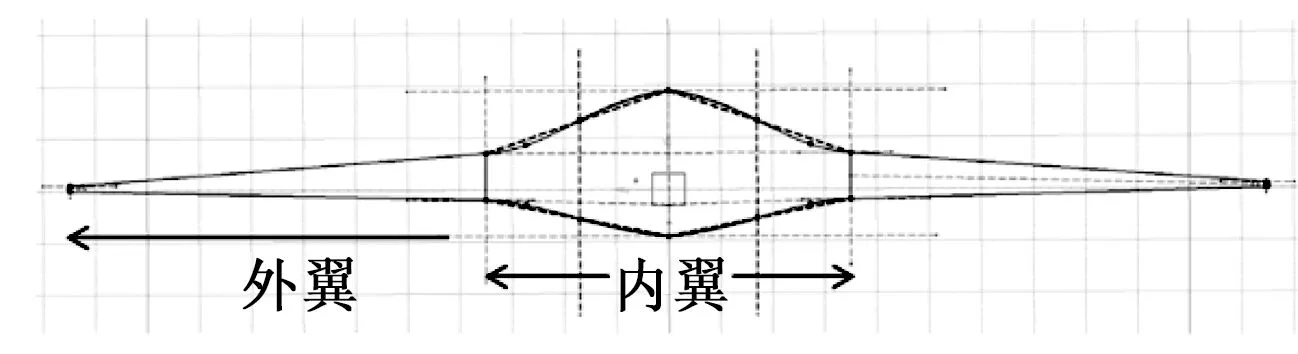
圖3 臨近空間太陽能飛翼無人機結構布局
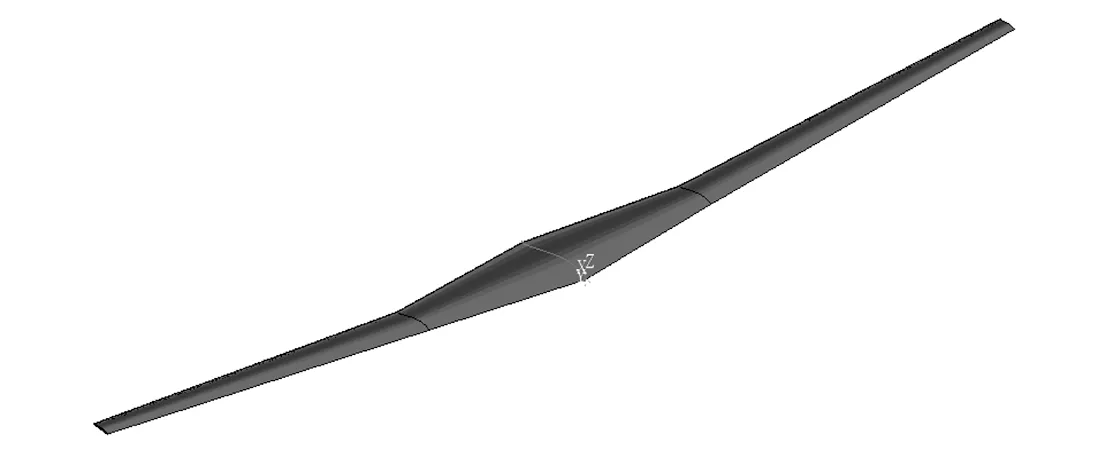
圖4 臨近空間太陽能飛翼無人機布局
臨近空間太陽能飛翼無人機設計翼展為60 m,展弦比25 m,且翼型NACA 8-H-12,翼根處弦長取2.4 m,翼梢處弦長取1.091 m,可使根梢比接近2.2,使得環量沿展向盡量成橢圓形最佳分布。據此設計的臨近空間太陽能飛翼布局無人機氣動模型如圖4。
飛翼無人機氣動布局參數如表1所示。
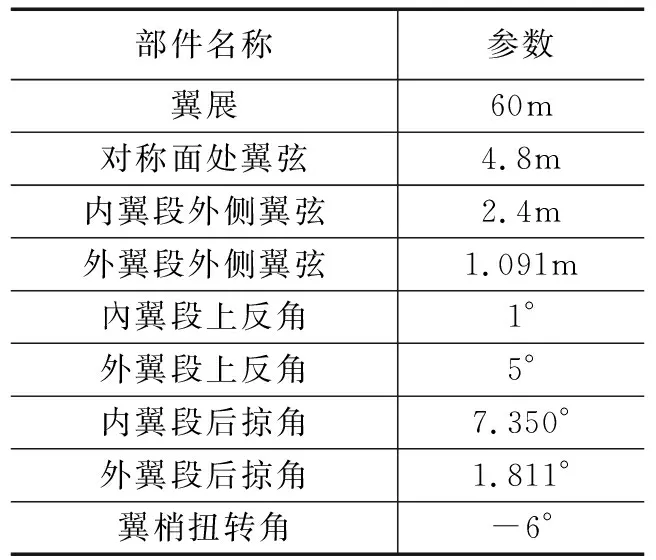
表1 臨近空間太陽能飛翼無人機參數
1.4 數值計算方法
本文采用的數值模擬仿真方法,以三維雷諾平均N-S方程作為控制方程,并選用湍流模,對氣動布局方案進行氣動力計算。計算條件為20 km高度,空氣密度為ρ=0.088 kg/m3,粘度系數為μ=1.4216×10-5Pa·s,來流速度為20 m/s,攻角α=-10°~20°。
1.4.1 控制方程
在笛卡爾坐標系下,三維雷諾平均N-S方程的一般形式為:
(1)
1.4.2 湍流模型
在本文計算中,利用Fluent,并選用湍流模型進行計算。計算條件為20 km高度,空氣密度為ρ=0.088 kg/m3,粘度系數為μ=1.4216×10-5Pa·s,來流速度為20 m/s,攻角為α=-10°~20°。
取k-w湍流模型,其方程為:
(2)
(3)
其中:部分參數表達式具體如下:
式中,k為單位體積湍流動能,ε為單位體積湍流動能耗散率,d為當地音速,R為添加項,dk和d2分別為Prandtl對于k、ε的逆效應,Cμ、β、η、η0、C1ε為常數。
1.4.3 邊界條件
計算的邊界條件為無滑移條件,遠場處為自由流條件,計算殘差收斂精度為10-6。
1.4.4 網格生成
利用ICEM軟件,基于多塊理論,分析幾何模型并進行塊劃分、修改等,并通過建立映射關系及邊界節點調整,建立結構化網格,并檢查及光順網格,以期仿真計算結果更為精確。
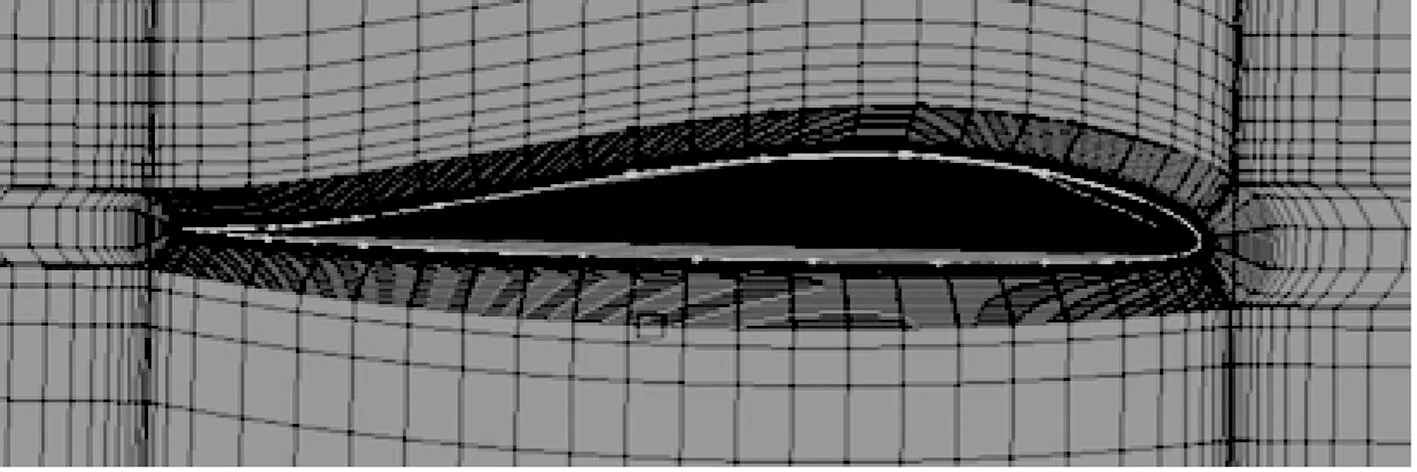
圖5 臨近空間太陽能飛翼無人機對稱面邊界層網格
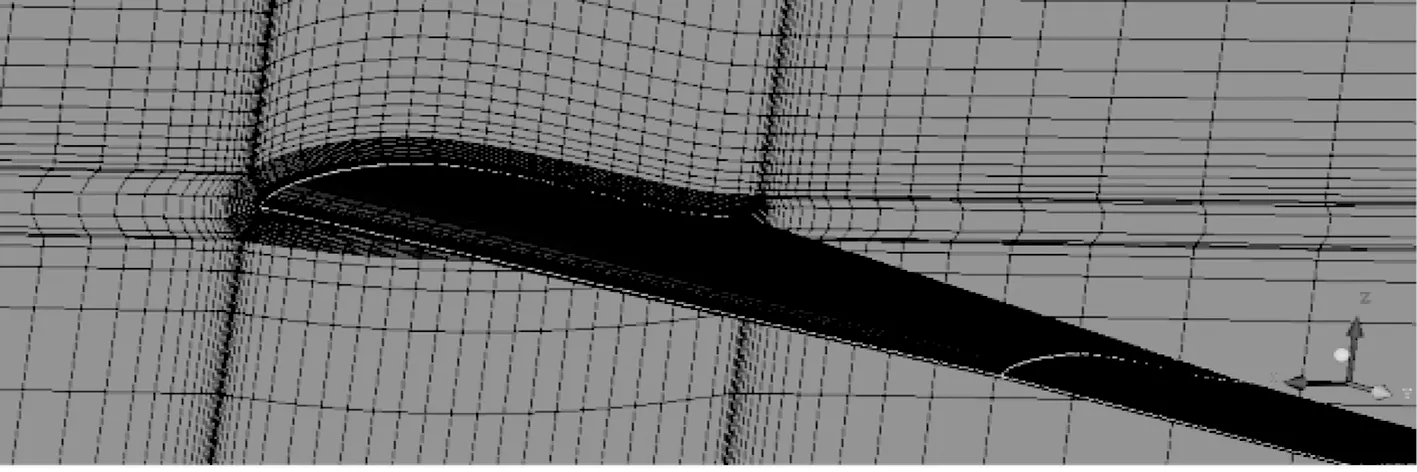
圖6 臨近空間太陽能飛翼無人機結構化網格
2 氣動特性仿真結果與分析
2.1 升阻力特性
圖7~圖8為巡航速度20 m/s,巡航高度20 km處,臨近空間太陽能飛翼無人機的氣動特性計算結果。
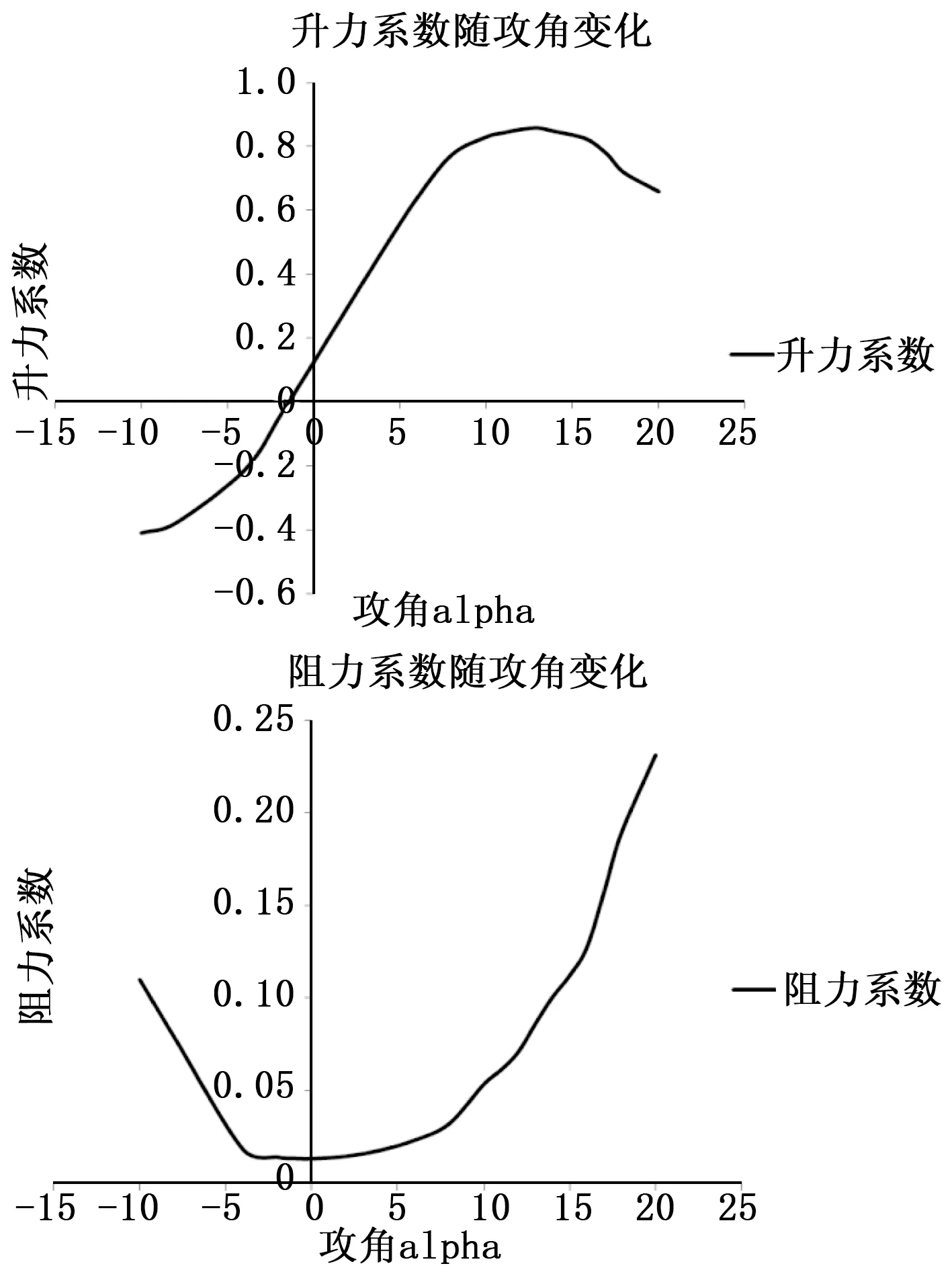
圖7 升力、阻力系數隨攻角變化曲線圖
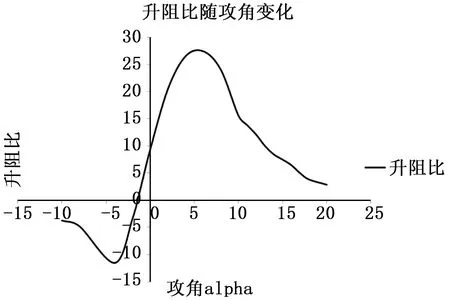
圖8 升阻比隨攻角變化曲線
由圖可以看出,由于在機翼展向對于翼型及根梢比的合理選擇,并進行了適當的幾何扭轉,有效減小了阻力,在0°攻角時的阻力系數僅為0.01342。同時,升力系數曲線的線性段較長,翼型在α=9°前,太陽能飛翼無人機的升力系數基本隨攻角的增大而呈線性遞增趨勢,在9°~13°的范圍內,升力系數CL開始偏離直線段,呈現非線性增加趨勢,在α=13°時達到最大值,失速特性較好。
由計算結果可知,設計外形具有非常好的升阻特性,在仿真計算的攻角范圍內升阻比較高,在失速攻角前呈現明顯的線性遞增趨勢,在0°~10°的攻角范圍內升阻比均保持10以上,更是在α=6°時達到最大值28,屬于相當高的范圍,該飛翼無人機的升阻特性提升非常明顯。
2.2 縱向靜穩定性
本文研究中,對太陽能飛翼無人機進行穩定性分析,采用機體坐標系,以機頭為原點,沿對稱面翼弦方向為x軸,并使用右手坐標系。當氣動焦點與無人機重心重合時,其縱向力矩系數Cm基本不隨攻角α變化。設置不同參數,調整無人機重心,當重心位置布置在x=1.725時,其結果如圖9所示。
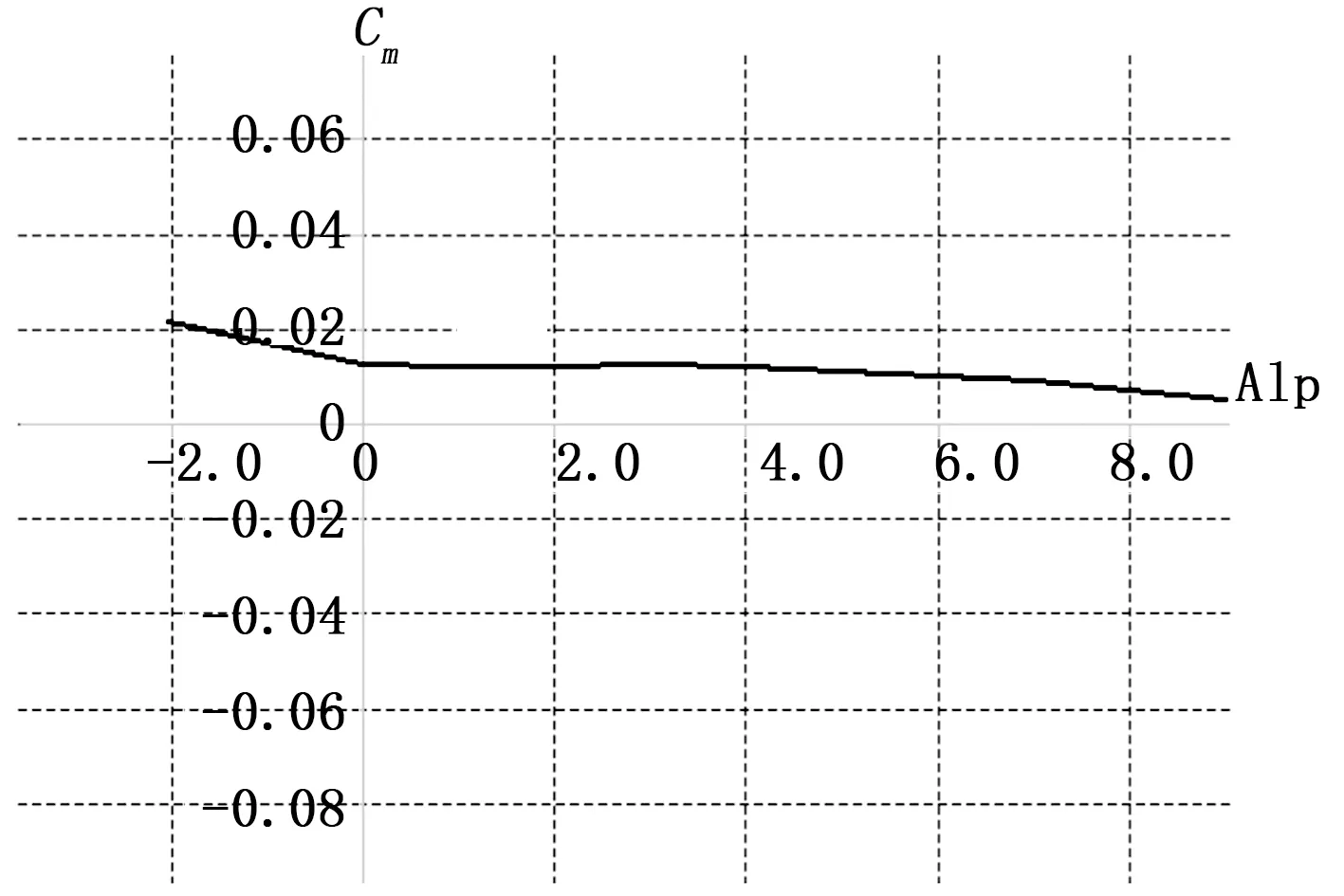

圖9 重心與氣動焦點重合時Cm基本不隨攻角變化
由圖9可知,該臨近空間太陽能飛翼無人機的氣動焦點在對稱面上、x=1.725 m處。在設計階段,應根據氣動焦點的位置確定重心位置,為確保無人機的穩定性,需適當放寬靜穩定性,將重心布置在氣動焦點之前,并根據前述飛翼氣動布局設計原理,靜穩定裕度亦不可過大,這里取靜穩定裕度12%,則重心位置為對稱面上x=1.396 m處。
由于飛翼布局無尾翼的特點,為增加其穩定性,本文對飛翼無人機增加了翼梢外洗(翼梢扭轉角-6°)的設計,飛翼無人機的縱向力矩系數Cm變化如下:
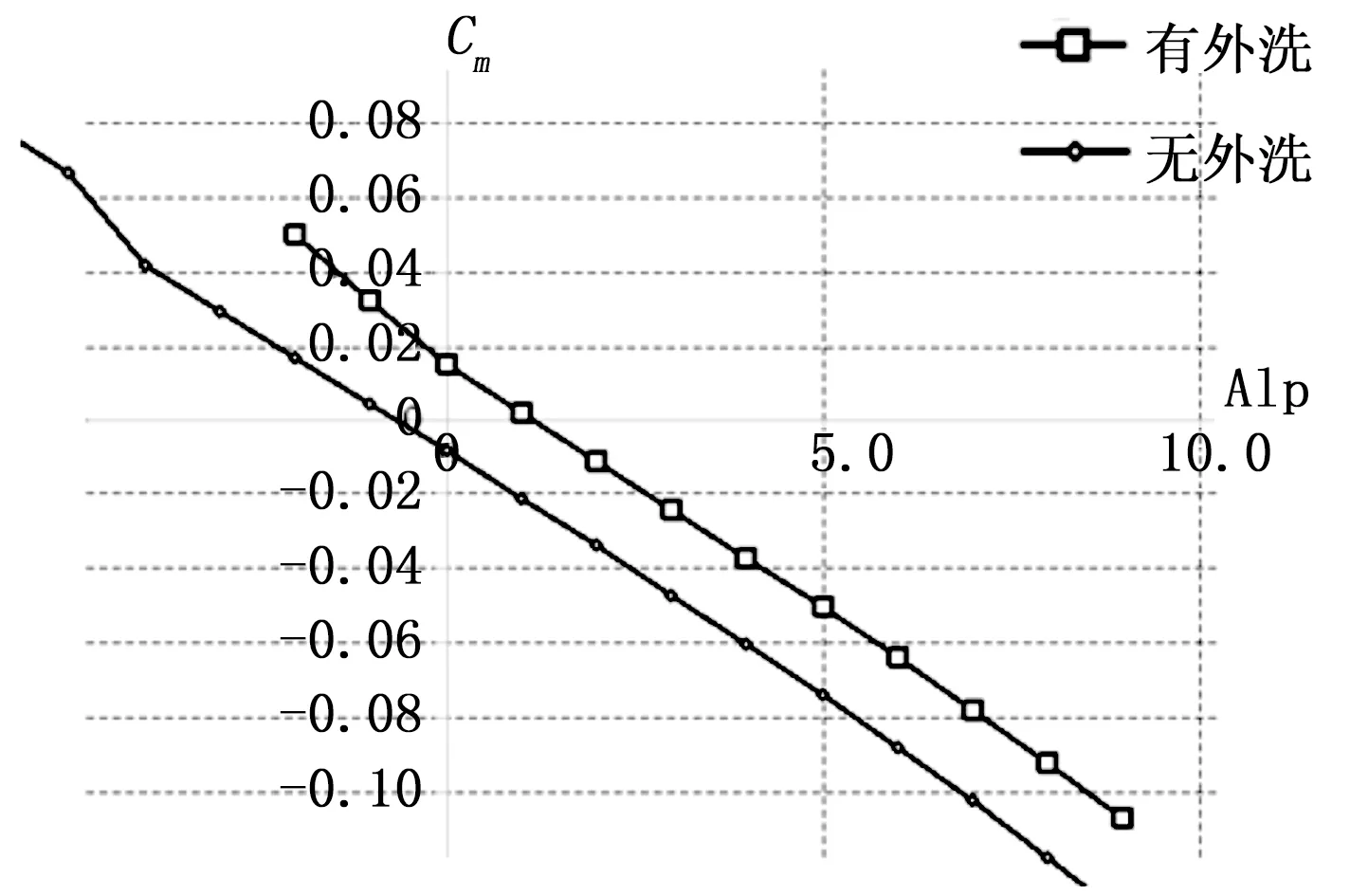
圖10 縱向力矩系數Cm隨攻角變化
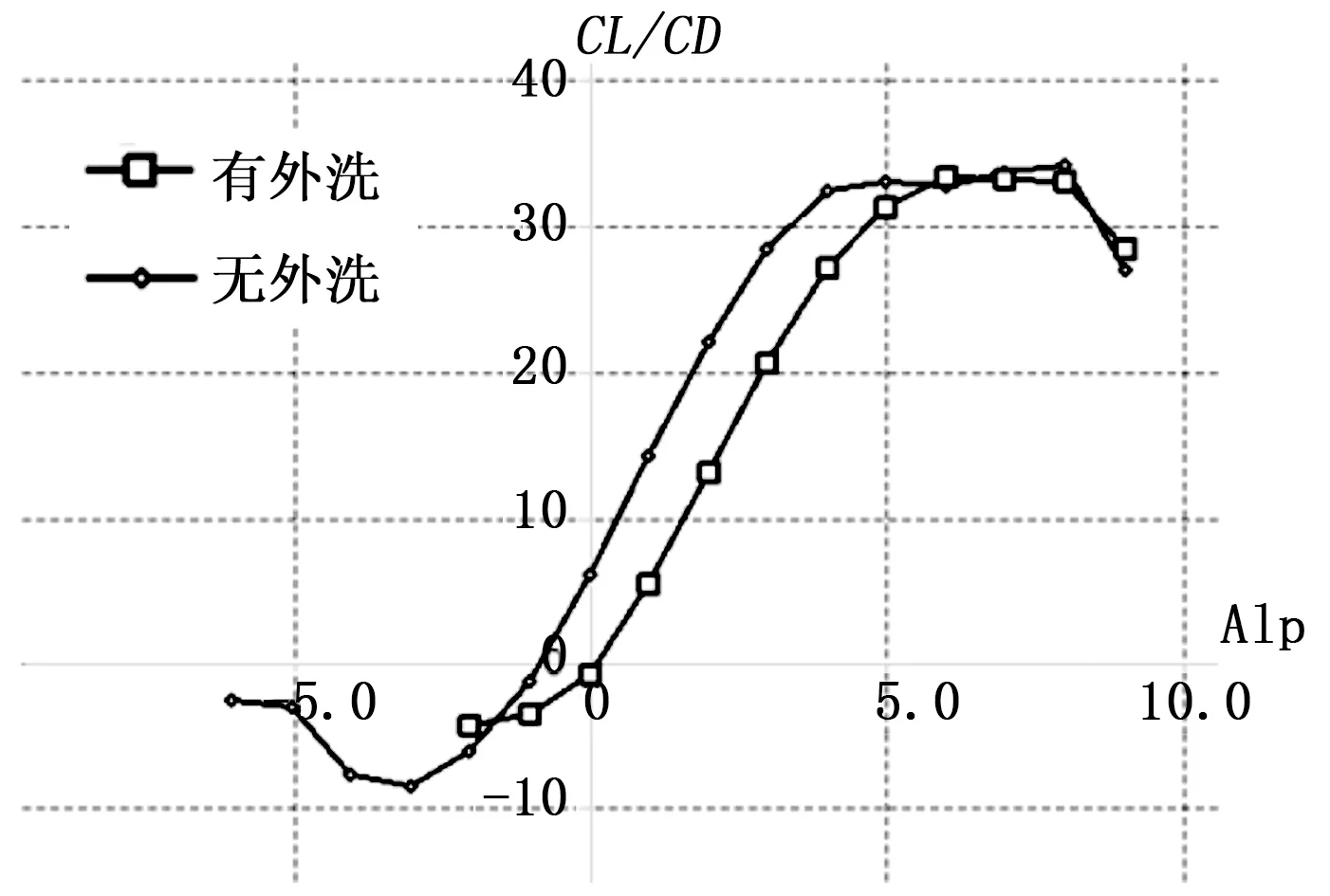
圖11 升阻比變化隨攻角變化
由圖10~11結果可知,飛翼無人機的縱向力矩系數Cm曲線呈線性變化趨勢,且斜率為負、基本不隨攻角變化,充分說明飛翼無人機不是必然是縱向不穩定的。此外,當翼梢外洗設計時,同一攻角下無人機的升阻比略高,但零縱向力矩系數為負值,即無人機無法在正攻角情況下配平,且平衡攻角(Cm=0)處的升阻比太低,僅為0.82;采用了翼梢外洗設計后,飛翼無人機的零縱向力矩系數改善為正值,可在正攻角下配平,且平衡攻角(Cm=0)處的升阻比提高至6.1。綜合考慮,采用翼梢外洗設計時飛翼無人機氣動性能可得到明顯的改善。
3 結論
作為一種先進非常規氣動布局,飛翼布局與常規布局相比具有明顯的氣動性能優勢。本文針對臨近空間太陽能無人機,利用數值方法對其進行了氣動仿真分析,結果表明:由于臨近空間的飛行環境決定了臨近空間飛行器的低速、低雷諾數特性,進而造成了臨近空間太陽能無人機飛行動壓小的特點,通過選用飛翼、大展弦比的氣動布局形式,可明顯彌補現有臨近空間太陽能無人機常規布局的氣動不足。臨近空間太陽能飛翼布局無人機從氣動外形上看,為翼身融合設計,整個飛機是一個升力面,設計符合全升飛行器(All-Lifting-Vehicle)概念,即飛行器上所有的水平安裝部件都能夠在全包線內成比例的提供升力,提高了升力特性,其大展弦比機翼又可以有效地減小誘導阻力,無尾布局形式亦避免了尾翼帶來的附加阻力,大的升力特性和小的阻力特性使得飛翼布局的無人機具有高升阻比特性,在攻角處的阻力系數僅為0.01342,升阻比可達9.3152,最大升阻比可達28,明顯超越前述文獻調研中的飛翼布局低速飛機15~18的升阻比范疇,氣動特性更為良好;為貼合飛行環境以及改善飛翼布局穩定性而采用的反S翼型和翼梢外洗設計也使得該飛翼無人機的穩定性得到明顯提升,使得無人機可在正攻角下配平,平衡攻角處的升阻比由無外洗設計時的0.82提升至有外洗設計時的6.1。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04