面向局部空間多通路無線數(shù)據(jù)通信系統(tǒng)的設(shè)計
2018-10-18 10:10:42,,,,
計算機測量與控制 2018年10期
, ,,,
(浙江工業(yè)大學(xué) 信息工程學(xué)院,杭州 310023)
0 引言
在全球信息化快速發(fā)展的大背景下,數(shù)據(jù)已成為國家重要的基礎(chǔ)性戰(zhàn)略資源,正引領(lǐng)新一輪科技創(chuàng)新。對于無處不在的數(shù)據(jù),尤其在人類健康領(lǐng)域,對于人體的身體機能和基本生命信息的監(jiān)測數(shù)據(jù)顯得尤為重要。對此,目前可穿戴設(shè)備可以在某種程度上實現(xiàn)了人體基本生命信息的監(jiān)測,比如在醫(yī)療方面,將人們的日常穿戴與生命信息監(jiān)測技術(shù)相結(jié)合,使其在自然狀態(tài)下獲取用戶的生命基本信息[1]。在體育應(yīng)用方面,對用戶進行運動量化指標和身體機能監(jiān)測數(shù)據(jù)的采集[2-3]。但是,目前的可穿戴設(shè)備雖然可以實現(xiàn)人體部分生命基本信息監(jiān)測的功能,但是它采集到的數(shù)據(jù)只能供用戶自己查看,而不能實現(xiàn)多個可穿戴設(shè)備的局部空間內(nèi)的組網(wǎng)[4-5],也不能對信息進行共享,不能為相關(guān)行業(yè)的決策者提供可用于分析和決策的數(shù)據(jù),并且其系統(tǒng)功能的升級需要對硬件進行重新設(shè)計,無形中提高了產(chǎn)品的成本。
目前,在局部空間中將多個設(shè)備進行組網(wǎng)[6],采用無線通訊的方式是最便捷的方式,而局部空間中將涉及到短距離的無線通訊。針對局部空間內(nèi)的短距離無線通信,文獻[7]提出了一種基于嵌入式的短距離無線通訊協(xié)議來解決通訊中不可靠的數(shù)據(jù)鏈路問題。文獻[8]對短距離無線通信技術(shù)的通信速度和功耗指標提出了新的要求。文獻[9]通過分析NRF24L01的射頻技術(shù)在進行短距離通信傳輸時,其傳輸幀所需時間較長的缺點,提出了一種SW-ARQ檢測通信質(zhì)量的通信協(xié)議。文獻[10-11]均是利用RF射頻技術(shù)并配合傳感器技術(shù)實現(xiàn)了自動測量和控制,但不能進行多協(xié)議的無線設(shè)備的通信,其中的傳感器在設(shè)計時是與系統(tǒng)集成在一起進行采樣和數(shù)據(jù)通信,使系統(tǒng)變得更加復(fù)雜,設(shè)計成本過高。
局部空間中無線通信的方式與穩(wěn)定性對通訊質(zhì)量還有著重要的影響。文獻[12]提出了一種利用藍牙通信和Android智能手機應(yīng)用程序之間的信息交互方法,其主要是通過手機控制端APP程序進行實現(xiàn),忽視了通訊過程中無線信號的干擾。文獻[13]針對無線通信在復(fù)雜環(huán)境中數(shù)據(jù)信號易受電磁干擾的影響,提出了一種無線通信過程中抗信道噪聲干擾的高效算法,雖然信號的抗干擾性得到保障但是在局部空間中對多個設(shè)備進行無線通信卻并未得到很好的解決。
為了解決在局部空間中多個外部監(jiān)測設(shè)備的組網(wǎng)以及信號傳輸?shù)姆€(wěn)定性和通信協(xié)議的兼容性問題。本文設(shè)計了一種面向局部空間的多通路無線數(shù)據(jù)通信系統(tǒng),在局部空間中將多個數(shù)據(jù)采集設(shè)備通過無線通訊進行組網(wǎng)連接,從中提取并共享數(shù)據(jù),以便為相關(guān)行業(yè)提供可用于分析與決策的大數(shù)據(jù)。本系統(tǒng)基于藍牙通訊協(xié)議和NRF射頻技術(shù)對不同功能的多個外設(shè)進行信息的同步收集,將收集的數(shù)據(jù)傳送到ARM處理器主控模塊進行處理,并將處理后的數(shù)據(jù)實時地傳輸?shù)娇蛻舳耍煽蛻舳诉M行數(shù)據(jù)的存儲、分析和相關(guān)行業(yè)的聯(lián)網(wǎng)共享,為行業(yè)決策者提供可供參考的大數(shù)據(jù),促進相關(guān)行業(yè)的健康發(fā)展。本文通過藍牙協(xié)議和NRF射頻模式這兩種通信方式對所設(shè)計系統(tǒng)的穩(wěn)定性和通信協(xié)議的可擴展性進行了實驗驗證。
1 系統(tǒng)總體設(shè)計方案
為了在局部空間中能夠?qū)崟r、精確地提取用戶產(chǎn)生的各項信息,使數(shù)據(jù)的采集更加的智能與高效,需要有合適的系統(tǒng)對相應(yīng)的各項指標數(shù)據(jù)進行收集與處理,并最終實現(xiàn)數(shù)據(jù)的共享。圖1所示為針對上述問題提出的一種多通路無線數(shù)據(jù)通信系統(tǒng)的總體設(shè)計方案圖。
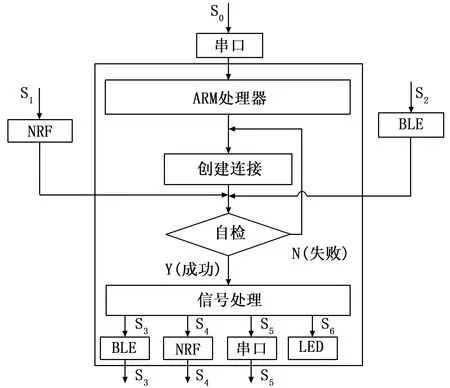
圖1 系統(tǒng)總體方案圖
本系統(tǒng)的核心是利用ARM處理器對多路數(shù)據(jù)信號的解碼和處理、藍牙(BLE)無線技術(shù)中的MTTM協(xié)議[14]和NRF射頻技術(shù)中的ShockBurstTM射頻模式[15]實現(xiàn)信號的無線傳輸以及串口技術(shù)進行數(shù)據(jù)的收發(fā)與共享,從而在局部空間中實時、穩(wěn)定地將不同通信協(xié)議的多個設(shè)備進行組網(wǎng)和信號處理。
系統(tǒng)總體方案圖中S0為系統(tǒng)的輸入信號,S1、S2作為系統(tǒng)NRF射頻模塊和藍牙模塊接收到的各項外部信息,S3、S4、S5為系統(tǒng)ARM處理器解碼和處理后的信息,信號S6可指示出系統(tǒng)的工作狀態(tài)。
輸入信號S0通過串口端發(fā)送至系統(tǒng)的ARM處理器,使系統(tǒng)與外部的藍牙設(shè)備和NRF射頻設(shè)備建立連接,接收外部NRF射頻設(shè)備的信號S1和外部藍牙(BLE)設(shè)備的信號S2;并將接收到的信息通過ARM處理器對其進行信息解碼,解碼后的數(shù)據(jù)用于對系統(tǒng)進行自檢,如果自檢失敗則是由于系統(tǒng)與外設(shè)的連接機制異常導(dǎo)致,此時系統(tǒng)會對連接異常的部分進行自動重連;如果自檢成功,系統(tǒng)進入正常工作模式,此時系統(tǒng)對藍牙端、NRF射頻端和串口端這三條通路經(jīng)過解碼后的數(shù)據(jù)進行校驗、分類和匹配等處理,并將處理后的數(shù)據(jù)分別發(fā)送至系統(tǒng)內(nèi)部的不同功能模塊,其中數(shù)據(jù)信號S3發(fā)送給系統(tǒng)內(nèi)部藍牙(BLE)端、S4發(fā)送給系統(tǒng)內(nèi)部的NRF射頻端、S5發(fā)送給系統(tǒng)內(nèi)部的串口端、S6發(fā)送給系統(tǒng)內(nèi)部的LED部分,使系統(tǒng)可以通過LED燈的變化實時為用戶反饋出系統(tǒng)的運行狀態(tài)。最后,系統(tǒng)通過內(nèi)部藍牙(BLE)、內(nèi)部NRF射頻和串口將信號S3、S4、S5發(fā)送至對應(yīng)的外部設(shè)備。
系統(tǒng)由串口端、NRF射頻端和藍牙(BLE)端建立三通路多信號的同步通信,每個通道可以同時傳輸至少兩種以上不同的信息;系統(tǒng)的ARM處理器對來自不同通道的多種信息進行實時接收;對來自不同通道的信息實時的進行信道解碼、信息獲取、校驗和匹配;對處理后的數(shù)據(jù)以每50 ms一次的通信速率發(fā)送給不同的通信通道;系統(tǒng)處理后的數(shù)據(jù)可以通過串口端傳輸給電腦端進行實時記錄、存儲以及數(shù)據(jù)的共享;為了確保系統(tǒng)能夠?qū)崟r正常運行,系統(tǒng)每隔500 ms進行一次自檢。由于系統(tǒng)無線通信部分采用模塊化設(shè)計,用戶可以根據(jù)需求對無線通信方式進行更改或擴展,使系統(tǒng)可以根據(jù)無線通信協(xié)議的不同進行定制。
2 系統(tǒng)硬件設(shè)計
系統(tǒng)的硬件組成主要包括USB轉(zhuǎn)串口模塊、ARM處理器主控模塊、藍牙模塊、NRF射頻模塊、智能LED燈模塊等。通過各模塊之間的相互配合實現(xiàn)多通路多協(xié)議的無線數(shù)據(jù)通信。
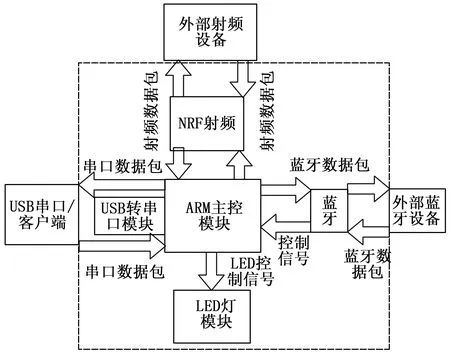
圖2 系統(tǒng)硬件框圖
如圖2所示:系統(tǒng)通過USB轉(zhuǎn)串口芯片構(gòu)建系統(tǒng)的USB轉(zhuǎn)串口模塊,該模塊連接電腦客戶端和ARM處理器主控模塊,將電腦客戶端USB接口轉(zhuǎn)化為通用串口,實現(xiàn)電腦客戶端和ARM處理器主控模塊的信息雙向互通;USB轉(zhuǎn)串口模塊接收ARM處理器主控模塊的信息并發(fā)送給客戶端,同時接收客戶端的信息并發(fā)送給ARM處理器。
系統(tǒng)采用低功耗Cortex-M3內(nèi)核的32位ARM微控制器STM32F103C8T6和相應(yīng)的外圍電路構(gòu)建系統(tǒng)的ARM處理器主控模塊。該模塊與USB轉(zhuǎn)串口模塊、藍牙模塊、NRF射頻模塊、LED燈模塊相連接,系統(tǒng)運行中實現(xiàn)對系統(tǒng)的自檢,當系統(tǒng)在運行中出現(xiàn)藍牙連接斷開時,ARM處理器主控模塊通過給LED燈模塊的反饋信息使用戶直觀的判斷出系統(tǒng)的運行狀態(tài)和故障原因。ARM處理器主控模塊與其它各模塊之間的信息(接收/發(fā)送)交互同步進行,其中ARM處理器主控模塊接收的信息包括:接收USB轉(zhuǎn)串口模塊從電腦客戶端接收到的連接外界指定藍牙設(shè)備的指令信息、動態(tài)修改NRF射頻模塊端口地址的指令信息、外部藍牙設(shè)備的控制信息;接收系統(tǒng)藍牙模塊發(fā)送過來的多種信息;接收射頻模塊發(fā)送過來的多種信息。并對接收到的這些信息進行數(shù)據(jù)的解析、檢驗,匹配和重組,然后將重組后的信息發(fā)送給相應(yīng)的功能模塊。
系統(tǒng)的藍牙模塊采用低功耗、低成本、高速度的2.4 GHz頻段全球開放的BLE4.0藍牙,并將其設(shè)置成主機模式,該模塊在系統(tǒng)中與ARM處理器主控模塊相連接,實現(xiàn)藍牙模塊與ARM處理器主控模塊的雙向通信,然后利用藍牙通信協(xié)議中的電話傳送控制協(xié)議(AT命令集)實現(xiàn)與外界藍牙設(shè)備的連接,并通過藍牙自身的主透傳協(xié)議模塊(簡稱MTTM)可以在透傳(TTM)或指令(CM)模式下進行工作[14]。當MTTM上電啟動后,進入待機狀態(tài),用戶通過AT指令連接藍牙設(shè)備,成功連接后MTTM將自動查找從機藍牙的透傳通道,進入數(shù)據(jù)透傳模式,其中用戶數(shù)據(jù)的具體含義可由上層的應(yīng)用程序自行定義。該模塊在系統(tǒng)中需要接收經(jīng)過ARM處理器主控模塊處理后的藍牙連接指令并將其發(fā)送給外部藍牙設(shè)備使其建立連接;接收ARM處理器處理后的控制信息并將控制信息發(fā)送給外部藍牙設(shè)備,從而對外部藍牙設(shè)備進行控制;接收外部藍牙設(shè)備通過透傳模式發(fā)送過來的信息并將其發(fā)送給ARM處理器。系統(tǒng)的NRF射頻模塊采用的是2.4~2.5 GHz世界通用ISM頻段的單片無線收發(fā)器芯片——NRF24L01進行射頻模塊的構(gòu)建,該射頻模塊連接ARM處理器主控模塊,并利用ShockBurstTM 模式下芯片內(nèi)部射頻協(xié)議在星形網(wǎng)絡(luò)中的應(yīng)答地址進行通道配置,實現(xiàn)與外部射頻模塊的連接和信息的雙向互通。
其中NRF24L01在ShockBurstTM接收模式下,當接收到的數(shù)據(jù)和地址均有效時IRQ將通知MCU,之后MCU將接收到的數(shù)據(jù)從RX_FIFO寄存器讀出。在接收模式下可以對6路不同通道的數(shù)據(jù)進行接收,每一個數(shù)據(jù)通道使用不同的應(yīng)答地址,但是共用相同的頻道[15]。該模塊在系統(tǒng)中可以接收經(jīng)過ARM處理器主控模塊處理后的動態(tài)修改射頻模塊端口(端口0)地址的指令信息,接收來自外部射頻器件發(fā)送過來的通訊信息;射頻模塊向ARM處理器主控模塊發(fā)送從外部射頻器件接收到的通訊信息。
系統(tǒng)采用體積小、能耗低、壽命長的LED燈(兩盞)構(gòu)成本系統(tǒng)的LED燈模塊,該模塊接收ARM處理器的控制信息,通過LED燈的閃爍狀態(tài)使用戶直觀的判斷出系統(tǒng)當前所處的工作狀態(tài),以及當系統(tǒng)處于異常時用戶通過LED燈的狀態(tài)判斷出異常的原因,便于對系統(tǒng)進行維護。
3 系統(tǒng)軟件設(shè)計
完成面向局部空間多通路無線數(shù)據(jù)通信系統(tǒng)的相關(guān)硬件電路設(shè)計和實現(xiàn)后,若要使多通路無線數(shù)據(jù)通信系統(tǒng)能夠正常運行,需要對其軟件部分進行相應(yīng)的設(shè)計。基于系統(tǒng)穩(wěn)定性、實時性的功能需求,系統(tǒng)的軟件方案設(shè)計了三種工作模式,分別為系統(tǒng)待機模式、系統(tǒng)正常工作模式和系統(tǒng)異常處理模式。系統(tǒng)軟件功能結(jié)構(gòu)如圖3所示。
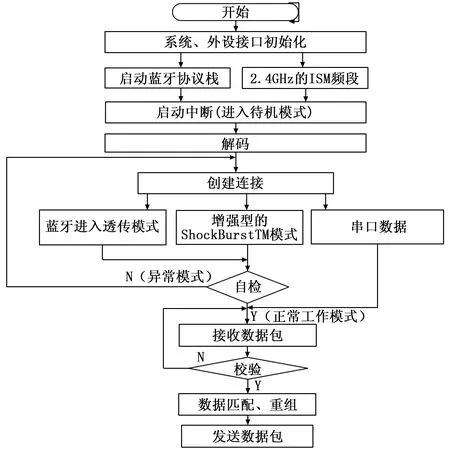
圖3 系統(tǒng)軟件功能結(jié)構(gòu)圖
系統(tǒng)待機模式:在程序開始運行時,需要對系統(tǒng)以及外設(shè)接口進行初始化處理,需要初始化的功能結(jié)構(gòu)如下:
……
LED_GPIO_Config();//LED 端口初始化
USART3_Config();//串口3初始化
USART2_Config();//串口2初始化
SPI_Init();//SPI初始化
NRF24L01_Init1();//NRF24L01初始化
TIM3_Configuration();// TIM3定時初始化
IWDG_Init(IWDG_Prescaler_64,625); //看門狗初始化
……
系統(tǒng)在完成初始化功能后將啟動藍牙協(xié)議棧和NRF24L01的2.4GHz的ISM頻段,使系統(tǒng)中的藍牙和NRF24L01處于待機狀態(tài);再開啟系統(tǒng)所需的中斷請求,如下所示:
……
USART3_NVIC_Configuration();//藍牙接收中斷
USART2_NVIC_Configuration();//USB接收中斷
TIM3_NVIC_Configuration();//定時器3中斷初始化
……
此時系統(tǒng)處于待機狀態(tài),系統(tǒng)中以ARM處理器為核心的ARM主控模塊將不給LED燈模塊發(fā)送指令信息,系統(tǒng)中的LED1和LED2處于常滅狀態(tài),預(yù)示系統(tǒng)處于待機狀態(tài)。
在局部空間中,處于待機狀態(tài)的系統(tǒng)通過客戶端進行激活,使其進入正常工作模式,具體實現(xiàn)如下:
對于處于待機狀態(tài)的系統(tǒng),需要通過客戶端發(fā)送外部藍牙的連接指令來實現(xiàn)連接指定外部藍牙和修改外部射頻通道地址,從而避免信號的串碼和外部其他藍牙信號和射頻信號的干擾。
首先,客戶端發(fā)送連接指令如:
AT+CONA0x00158330A3B1
其中0x00158330A3B1為外部指定藍牙設(shè)備的MAC地址,每一個藍牙設(shè)備的MAC地址都不相同)經(jīng)過USB轉(zhuǎn)串口模塊傳送給ARM主控模塊,由ARM主控模塊對其幀頭(“AT+CONA”)進行校驗,無誤后根據(jù)藍牙協(xié)議中的電話傳送控制協(xié)議(AT指令集)通過串口發(fā)送藍牙連接的AT指令:
……
UART_send(UBuffer3,24); //發(fā)送藍牙連接指令
……
使藍牙模塊與外部藍牙建立連接。同時ARM主控模塊從連接指令中截取指令的后四位“A3B1”,將后四位數(shù)據(jù)匹配和重組成射頻模塊NRF24L01通道0的地址(并利用ASCII碼將字符轉(zhuǎn)換成16進制數(shù)):

0x410x330x420x310xFF
再調(diào)用修改射頻NRF24L01通道0地址的函數(shù):
……
bsp_change_nrf_ID();//修改NRF24L01通道0的地址
……
此時系統(tǒng)成功建立藍牙連接,藍牙進入透傳模式(TTM),同時NRF24L01射頻模塊的通道0地址修改成功后NRF24L01進入ShockBurstTM模式。
其次,通過ARM處理器接收到的來自藍牙模塊和NRF24L01射頻模塊的數(shù)據(jù),并設(shè)定好參與系統(tǒng)自檢的數(shù)據(jù)類型來對系統(tǒng)進行自檢,除此之外NRF24L01自身會進行自檢、系統(tǒng)看門狗定時器對系統(tǒng)是否跑飛進行自檢,每500 ms自檢一次如下所示:
……
while(NRF24L01_Check1()){}//NRF24L0自檢
Feed_Dog();//看門狗喂狗函數(shù)
……
自檢通過后系統(tǒng)對USB端、藍牙端、射頻端等多個通道發(fā)送過來的數(shù)據(jù)進行接收,接收函數(shù)如下:
……
void USART3_IRQHandler(void);//藍牙接收中斷
void USART2_IRQHandler(void)//USB接收中斷
NRF24L01_RxMode();//NRF24L01接收數(shù)據(jù)包
……
對于接收到的數(shù)據(jù)包傳送給ARM主控模塊,由ARM主控模塊對接收到的數(shù)據(jù)進行幀頭與幀尾的校驗、匹配、重組后得到新的幾組數(shù)據(jù),(其中幀頭可以設(shè)置成相同的數(shù)據(jù)位,如:幀頭設(shè)置成“123”,幀尾設(shè)置成“21”,數(shù)據(jù)的第四位設(shè)置成校驗位,根據(jù)數(shù)據(jù)校驗位的不同,將數(shù)據(jù)匹配成不同通道中的不同數(shù)據(jù),再根據(jù)其對應(yīng)的通道類型對匹配后的數(shù)據(jù)進行重組。)之后這幾組數(shù)據(jù)再經(jīng)過不同的通道每隔50 ms發(fā)送給相應(yīng)的端口。調(diào)用的函數(shù)有:
……
Data_Send3();//發(fā)送給外部藍牙設(shè)備
Data_Send2();//發(fā)送給外客戶端
NRF24L01_TxMode1(); //發(fā)送給外部射頻
……
最后,對于系統(tǒng)處于正常工作模式時,系統(tǒng)中ARM處理器主控模塊發(fā)送LED燈(兩盞LED燈)模塊的控制指令,此時LED燈模塊從常滅狀態(tài)進入正常交替閃爍(周期設(shè)置為500 ms),同時LED燈模塊每隔500 ms的交替閃爍,可以將系統(tǒng)處于正常工作模式的狀態(tài)反饋給使用者。
此外,系統(tǒng)正常模式時通過USB串口發(fā)送給客戶端的數(shù)據(jù)可以由客戶端進行存儲,用于實現(xiàn)數(shù)據(jù)的共享,便于行業(yè)對數(shù)據(jù)的提取,從而從大數(shù)據(jù)的角度進行分析和決策。
但是對于任何系統(tǒng)都會有異常情況的出現(xiàn),為了確保系統(tǒng)的穩(wěn)定性,對系統(tǒng)做了如下的異常分析與處理:
當系統(tǒng)上電或者正常運行了一段時間后既不是處于待機模式也不是處于正常運行模式(LED燈模塊既不是常滅也不是以500 ms為周期交替閃爍)時,則此時默認系統(tǒng)為工作異常狀態(tài)。在本系統(tǒng)中出現(xiàn)異常狀態(tài)的原因有:(1)系統(tǒng)供電異常(表現(xiàn)為藍牙模塊的指示燈不亮);(2)系統(tǒng)藍牙與外界藍牙連接斷開(表現(xiàn)為藍牙模塊指示燈由常量編程閃爍,同時系統(tǒng)LED燈模塊的LED1狀態(tài)為快速閃爍,LED2狀態(tài)為常滅);(3)系統(tǒng)的射頻部分通道0地址沒有匹配成功(表現(xiàn)為系統(tǒng)的LED燈模塊的LED1狀態(tài)為常滅,LED2狀態(tài)為慢速閃爍);(4)系統(tǒng)程序跑飛(表現(xiàn)為系統(tǒng)LED燈模塊的LED1與LED2同時閃爍)。
針對上述四種情況,除了第1種情況系統(tǒng)供電異常屬于外部影響,此時只需要給系統(tǒng)重新上電即可;對于第2、3、4這三種情況都是系統(tǒng)自檢未通過造成,當出現(xiàn)第2種情況(持續(xù)5秒時)系統(tǒng)將調(diào)用其內(nèi)部flash中保存的連接外部藍牙設(shè)備的MAC地址,系統(tǒng)將自動重發(fā)藍牙連接的AT指令使系統(tǒng)重新建立連接;當出現(xiàn)第3種情況(持續(xù)5秒)時系統(tǒng)會調(diào)用其內(nèi)部flash中存放的重組后的射頻模塊NRF24L01通道0的地址再重新發(fā)送給射頻模塊進行通道0應(yīng)答地址的配對,重新建立連接;當出現(xiàn)第4種情況時,系統(tǒng)看門狗將會給程序進行復(fù)位,系統(tǒng)將重新開始運行。
4 系統(tǒng)測試與應(yīng)用
本系統(tǒng)在Keil環(huán)境下完成軟件方案的編寫后,搭建了實驗環(huán)境平臺進行多次反復(fù)實驗,實驗平臺如圖4所示:圖中2(1為2的投影圖)為面向局部空間多通路無線數(shù)據(jù)通信系統(tǒng),左邊的虛線框為NRF24L01,中間的虛線框為LED燈模塊,右邊的虛線框為藍牙模塊;圖中5為外部藍牙監(jiān)測設(shè)備;圖中3為外部藍牙提供速度采樣值;圖中4為6(外部射頻)的背面構(gòu)造(分別為NRF24L01和MPU6050);圖中7為萬用表。
實驗環(huán)境為三條通路五種信息。通過此實驗平臺對本系統(tǒng)的穩(wěn)定性和可靠性進行測試。如圖5實驗原理示意圖所示:通道一為系統(tǒng)與電腦串口端進行通信(利用串口助手模擬客戶端應(yīng)用程序,對通信的過程和結(jié)果進行檢測);通道二為系統(tǒng)與外部藍牙進行通信(通信結(jié)果通過keil軟件和串口調(diào)試助手進行仿真和檢測);通道三為系統(tǒng)與外部射頻(NRF24L01)設(shè)備進行通信。
實驗中通過五種信息的傳輸以及人為對系統(tǒng)制造干擾從而對系統(tǒng)進行穩(wěn)定性和可靠性測試,其中5種信號分別為:1)系統(tǒng)連接信息(包括系統(tǒng)藍牙與外部藍牙連接信息、系統(tǒng)射頻與外部射頻設(shè)備的連接信息),可通過藍牙部分的指示燈以及系統(tǒng)LED燈模塊進行查看);2)速度采樣信息(系統(tǒng)接收外部藍牙發(fā)送的速度采樣信息、經(jīng)過系統(tǒng)處理后的速度信息發(fā)送給電腦串口端)通過串口助手進行查看;3)角度信息(系統(tǒng)接收外部射頻設(shè)備中的MPU6050陀螺儀角度信息、經(jīng)過系統(tǒng)處理后的角度信息發(fā)送給電腦串口端)通過串口助手進行查看;4)按鍵信息(系統(tǒng)接收外部射頻設(shè)備中的按鍵遙控信息、經(jīng)過系統(tǒng)處理后的按鍵遙控信息發(fā)送給電腦串口端),通過串口助手進行查看;5)PWM控制信息(包括:通過串口助手給系統(tǒng)發(fā)送PWM控制信號、系統(tǒng)將PWM控制信號進行處理后發(fā)送給外部藍牙設(shè)備,對外部設(shè)備進行控制(通過keil軟件對外設(shè)進行波形仿真)。同時為了進一步測試系統(tǒng)的穩(wěn)定性和快速響應(yīng)的性能,測試時ARM主控每50 ms發(fā)送一次數(shù)據(jù)包。此外人為制造的干擾包括:1)在利用此實驗平臺進行實驗的過程中在實驗環(huán)境周圍增加多個藍牙設(shè)備和射頻設(shè)備,測試系統(tǒng)的抗干擾性能;2)系統(tǒng)正常運行時分別人為的使系統(tǒng)藍牙與外部藍牙連接斷開以及系統(tǒng)射頻與外部射頻連接斷開,從而測試系統(tǒng)的自檢功能。
通過實驗驗證:系統(tǒng)的LED燈模塊能夠?qū)崟r、正確的反應(yīng)出系統(tǒng)的工作狀態(tài)。系統(tǒng)的ARM處理器主控模塊接收串口端的信息源,系統(tǒng)對其處理后經(jīng)過藍牙通道將其發(fā)送給外部藍牙監(jiān)測設(shè)備,控制外部藍牙監(jiān)測設(shè)備的PWM波信號,如圖6所示外部藍牙設(shè)備接收波形控制信號產(chǎn)生的PWM波形(50%占空比)仿真圖,測試系統(tǒng)信號的穩(wěn)定性。系統(tǒng)的ARM處理器主控模塊對串口通道、藍牙通道、NRF射頻通道接收的信息源能夠?qū)崟r穩(wěn)定的進行信道解碼、信息校驗、分類匹配和信息傳輸,如圖7所示。
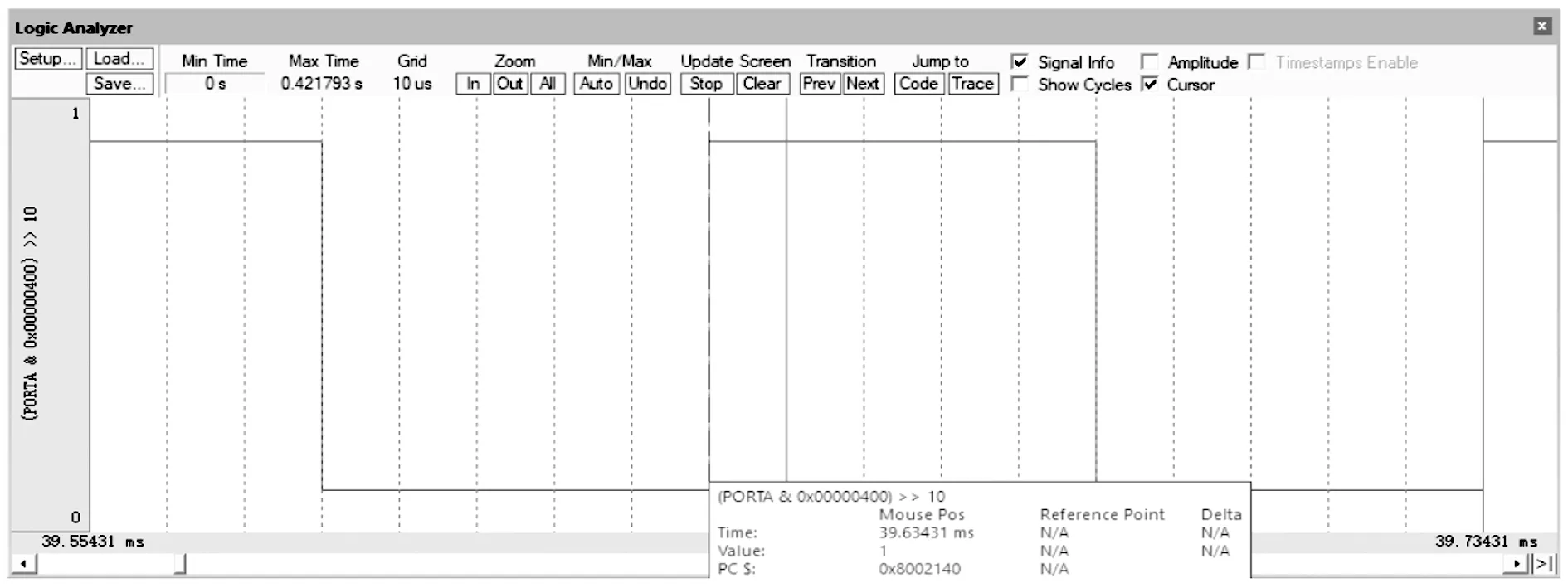
圖6 控制外設(shè)PWM信號的keil仿真圖
第一行(AT+CONA0x00158330A3B1)為串口成功接收到的藍牙連接指令,經(jīng)過系統(tǒng)處理后使藍牙設(shè)備建立無線連接,連接成功后進入數(shù)據(jù)透傳模式,而第二行之后為系統(tǒng)運行中實時接收和處理后的信息經(jīng)串口打印供實驗查看的數(shù)據(jù),如:第二行括號中數(shù)據(jù)“1231101821”為接收來自外部NRF射頻經(jīng)過系統(tǒng)成功處理后的角度數(shù)據(jù)(101.8°),第四行“1232000021”為系統(tǒng)處理后的外部NRF射頻的遙控信息(無按鍵按下),第六行“1230003921”為系統(tǒng)處理后的外部藍牙發(fā)送的速度信息(3.9 km/s)。
實驗測得該系統(tǒng)在一定空間范圍內(nèi)與多個外部設(shè)備進行無線通訊,通過ARM處理器獲取來自不同設(shè)備不同通信協(xié)議的信息源,對各通道的信息源進行信道解碼、信息獲取、信息校驗、分類匹配和傳輸?shù)忍幚怼r炞C了本系統(tǒng)在局部空間中通過多種無線通信協(xié)議進行無線連接并同時獲取多個通道中的信息(如:速度、角度、PWM波、遙控等信息)時系統(tǒng)仍具有很好的實時性。實驗中人為制造干擾信號并使用串口實時打印通信信息,數(shù)據(jù)無信息丟失和亂碼現(xiàn)象,確保該系統(tǒng)具有很好的穩(wěn)定性。
5 結(jié)束語
本文設(shè)計并實現(xiàn)了一種面向局部空間的多通路無線數(shù)據(jù)通信系統(tǒng),該系統(tǒng)硬件部分以ARM處理器為核心,利用藍牙無線技術(shù)和NRF無線射頻技術(shù)構(gòu)建系統(tǒng)的藍牙通信端和射頻通信端,并結(jié)合系統(tǒng)的USB串口端組成多通路通信系統(tǒng);軟件部分通過ARM處理器對各通道的信息源進行信道解碼、信息獲取、信息校驗、分類匹配和傳輸?shù)忍幚恚瑢崿F(xiàn)在局部空間中對多個不同通信協(xié)議的外部監(jiān)測設(shè)備進行無線連接,獲取和處理不同通道中來自不同通信協(xié)議不同監(jiān)測設(shè)備的數(shù)據(jù)。并通過實驗測試出該系統(tǒng)具有良好的實時性和穩(wěn)定性。
由于該系統(tǒng)可以在局部空間中實時、穩(wěn)定的對多個外部監(jiān)測設(shè)備進行監(jiān)測,將檢測到的數(shù)據(jù)可以通過客戶端進行數(shù)據(jù)的存儲、分析和共享。對于在臨床醫(yī)療和體育健身方面用戶的生命基本信息和身體機能指標的監(jiān)測有著很好的推廣價值,便于為行業(yè)提供用于分析和決策的數(shù)據(jù)。并且該系統(tǒng)可以通過更換或增加不同的通信協(xié)議模塊對系統(tǒng)的通信方式進行擴展,使其支持更多的無線通信協(xié)議,實現(xiàn)更多無線通信協(xié)議之間的組網(wǎng)。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57