大角度轉向電動汽車懸架與轉向系設計
2018-10-26 08:19:18馮乾隆宋偉萍南友飛任田園
汽車實用技術 2018年20期
馮乾隆,宋偉萍,南友飛,任田園
?
大角度轉向電動汽車懸架與轉向系設計
馮乾隆,宋偉萍,南友飛,任田園
(長安大學汽車學院,陜西 西安 710064)
為了提高汽車轉向靈活性及減小交通擁堵和提高停車空間利用率,基于輪轂電機及線控轉向基礎上,提出了一種可實現大角度轉向的電動汽車模型,使其可實現90°大角度轉向,從而提高汽車的轉向靈敏性,并用SolidWorks軟件對轉向系與懸架進行設計,分析懸架系統設計的合理性。
大角度轉向;轉向系;懸架
前言
近幾年,我國汽車行業發展迅速,引起了城市交通擁堵等一系列問題。而在輪轂電機驅動的基礎上,發展可實現大角度轉向的四輪獨立轉向電動汽車有利于解決城市交通擁堵,提高停車空間和道路利用程度[1-2]。這種設計也大大增加了汽車的操縱穩定性,使汽車動力響應快速和準確,在汽車停車入庫方面也發揮了積極重要的作用。而要實現此功能,對汽車轉向系統和懸架系統提出了更高的要求,需設計出能滿足汽車90°大角度轉向的轉向系和懸架系統。
1 轉向系統結構設計
為使汽車可實現大角度轉向,在傳統轉向系上做一些改進,將傳統機械連桿式轉向機構由線性控制轉向電機取代,通過齒輪齒條機構單獨控制每個車輪的轉向節,取消轉向梯形機構等機械連桿機構,使每個車輪轉向互不影響,同時每個車輪都由一個轉向電機單獨驅動,從而實現車輪獨立轉向。通過對轉向電機的控制,使每個車輪的轉角均達到[-36°,+90°],從而實現汽車多種轉向模式。
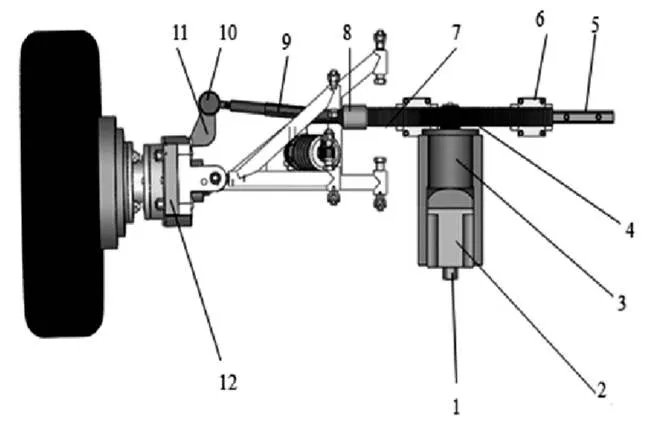
1.控制器 2.轉向電機 3.減速機 4.轉向齒輪 5.滑軌 6.滑塊單元 7.轉向齒條 8,10.球頭鉸鏈 9.轉向橫拉桿 11.轉向節臂 12.轉向節
所設計大角度轉向電動汽車轉向系統三維模型如圖1所示。將駕駛員作用在方向盤上的轉矩信號通過傳感器傳至控制器1,經過控制器計算使轉向電機2輸出相應轉速,經減速機3將動力傳至轉向齒輪4,經齒輪嚙合,將動力傳至齒條7,齒條7經球鉸鏈8與轉向橫拉桿9相連,轉向橫拉桿9另一端又經過球鉸鏈10與轉向節12相連,最終動力經轉向橫拉桿9傳至車輪實現汽車轉向。
2 懸架系統結構設計
本設計選用不等長式雙橫臂懸架結構,對懸架的設計必須滿足轉向時各部件間不發生干涉,因此采用直角三角形結構,設計出的懸架系統如圖2所示。為減小懸架安裝誤差,在上下橫臂與車架相連的套筒內裝有橡膠襯套。上下橫臂另一端分別通過桿端關節12、10與轉向節的C形槽3、11相連,桿端關節的球鉸端用鉸制孔螺栓固定于C形槽內。上下C形槽3、11分別通過兩端的螺栓固定于轉向節4上。在轉向節另一端,裝有電磁制動器8,用于產生汽車的制動力。電磁制動器8又與輪轂電機6通過一個連接件7進行連接,輪轂電機外圈(轉子)用螺柱與輪轂總成5相連,內圈通過花鍵與轉向節相連,并用圓螺母進行軸向固定,從而使輪轂電機內圈(定子)得到固定。

1.減震器 2.上橫臂 3.上C形槽 4.轉向節 5.車輪總成 6.輪轂電機 7.連接件 8.電磁制動器 9.轉向節臂 10.下橫臂桿端關節 11.下C形槽 12.上橫臂桿端關節 13.下橫臂
3 懸架導向機構仿真分析
本文主要分析當車輪上下震動時,懸架主銷內傾角、主銷后傾角、車輪外傾角的變化。
表1 雙橫臂獨立懸架的設計參數
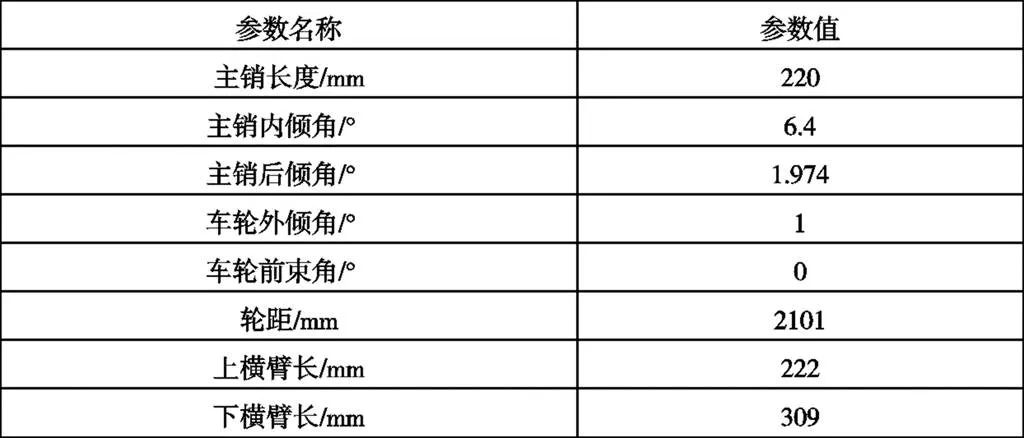
仿真分析前,首先對模型進行設置,設定汽車滿載時下橫臂與地面平行,分析車輪上下跳動±50mm時的各參數變化。所設計懸架參數如表1所示。
3.1 主銷內傾角變化
主銷內傾角可以使車輪轉動時獲得一定的回正力矩[3]。經過分析,主銷內傾角隨車輪跳動位移變化如圖3所示,車輪[-50,+50]上下跳動時,主銷內傾角變化大小約為1.2°,基本滿足設計要求。
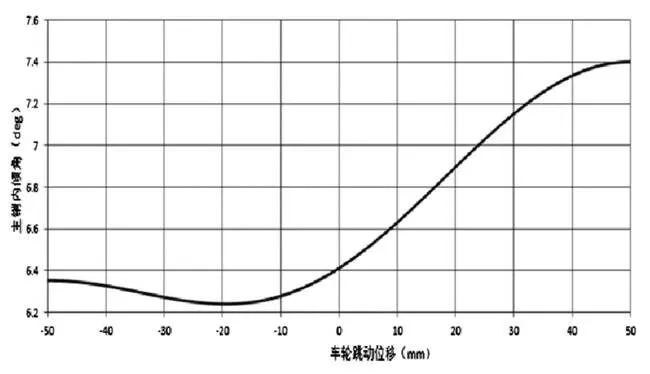
圖3 主銷內傾角隨車輪上下跳動位移的變化曲線
3.2 主銷后傾角變化
主銷后傾角變化如圖4所示。車輪跳動時,后傾角也跟著發生變化,變化角度約為0.0048°,在理想的變化區域內,因此滿足設計要求。

圖4 主銷后傾角隨車輪上下跳動的變化
3.3 車輪外傾角
車輪外傾角的大小也會影響汽車的操縱穩定性,車輪外傾角隨車輪上下跳動產生變化會影響汽車直線行駛時的行駛穩定性、轉向性能以及會使輪胎磨損等[4]。本設計中,當車輪跳動時,車輪外傾角變化如圖5所示,外傾角變化大小在1.2°以內,滿足設計要求。
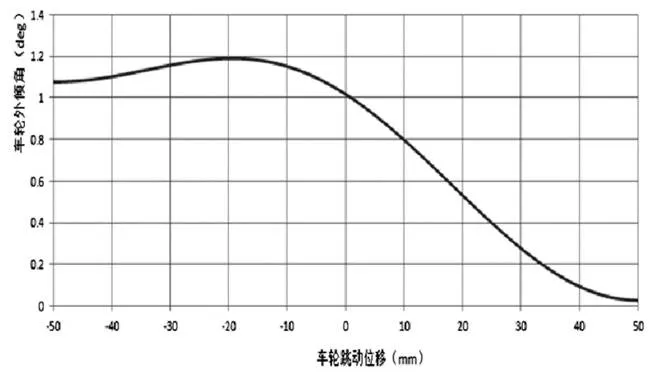
圖5 車輪外傾角隨車輪上下跳動位移的變化
4 總結
本文設計的四輪獨立轉向電動汽車可實現汽車[-36°,90°]大角度轉向,提高汽車轉向靈活性從而減小城市道路擁堵。提出一種新型齒輪齒條轉向系,且為了避免運動干涉,設計出符合要求的直角三角形橫臂結構。通過懸架定位參數的分析,驗證此設計的合理性。
[1] 李校培.基于輪轂電機的空間節約型電動汽車全轉向系統研究[D].西南交通大學, 2015.
[2] Kueperkoch S, Ahmed J, Kojic? A, et al. Novel Vehicle Stability Control Using Steer-by-Wire and Independent Four Wheel Torque Distribution[C]// ASME 2003 International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engin -eers, 2003:413-420.
[3] 戴逢權.多連桿懸架系統性能仿真研究[D].武漢理工大學,2011.
[4] 劉輝.空氣懸架大客車的多體動力學仿真分析[D].長安大學, 2011.
Design of suspension and steering system for large angle steering electric vehicle
Feng Qianlong, Song Weiping, Nan Youfei, Ren Tianyuan
( Automobile Chang'an University, Shaanxi Xi’an 710064 )
In order to improve vehicle steering flexibility, reduce traffic congestion and improve parking space utilization, based on hub motor and wire control steering, an electric vehicle model which can realize large angle steering is proposed, which can achieve 90° angle steering, thus improving the steering sensitivity of the vehicle. The steering system and suspension are designed with SolidWorks software, and the rationality of suspension system design is analyzed.
steering large angle; steering system; suspension
B
1671-7988(2018)20-15-03
U469.72
B
1671-7988(2018)20-15-03
U469.72
馮乾隆,就讀于長安大學,碩士研究生,主要研究方向為汽車電控技術。
10.16638/j.cnki.1671-7988.2018.20.005
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
汽車與安全(2019年9期)2019-11-22 09:48:03
藝術啟蒙(2018年7期)2018-08-23 09:14:18
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
舒適廣告(2008年9期)2008-09-22 10:02:48
