海洋錨泊定位系統操作控制及布放實踐
2018-10-31 08:50:52霍文軍
機電設備 2018年5期
霍文軍
(中國人民解放軍海軍研究院,北京 100161)
0 引言
對于各種大型工程船舶以及海洋輔助救助船舶而言,錨泊定位系泊系統是船舶定位的常用技術。錨泊定位涉及多個操控和管理環節,包括定位布錨方式、收放拉緊技巧、工作過程監測和快速響應等,對其進行深入研究和系統總結,以規范操作、并盡快實現工程化應用,是海洋工程領域的一個課題。文章介紹了系泊定位系統相關裝置的規范操作和作業控制流程,以實現安全、高效的錨泊定位系統布放作業。
1 系統組成及工作原理
定位錨泊系統主要由絞車本體、液壓泵站及電控系統組成。絞車本體主要由卷筒、帶式制動器、離合器、開式齒輪、齒輪箱和變頻電機組成。液壓泵站主要提供帶式制動器、離合器的操作動力,并為應急釋放提供動力源。絞車的電控系統包括本地控制系統和遠程控制系統兩部分。本地控制系統包括本地控制臺、變頻控制柜、制動電阻箱等。在本地控制臺可以實現絞車的完整功能操作。遠程控制系統由集中控制臺和閉路電視監視裝置組成。閉路電視監視裝置分為顯示器和攝像頭,顯示器集成在控制臺上,攝像頭布置在絞車周圍以獲得絞車工作時的視頻圖像。集中控制臺為低權限控制臺[1-2]。在集中控制臺上可以實現全船 4臺絞車的操作。電控系統控制示意圖如圖1所示。
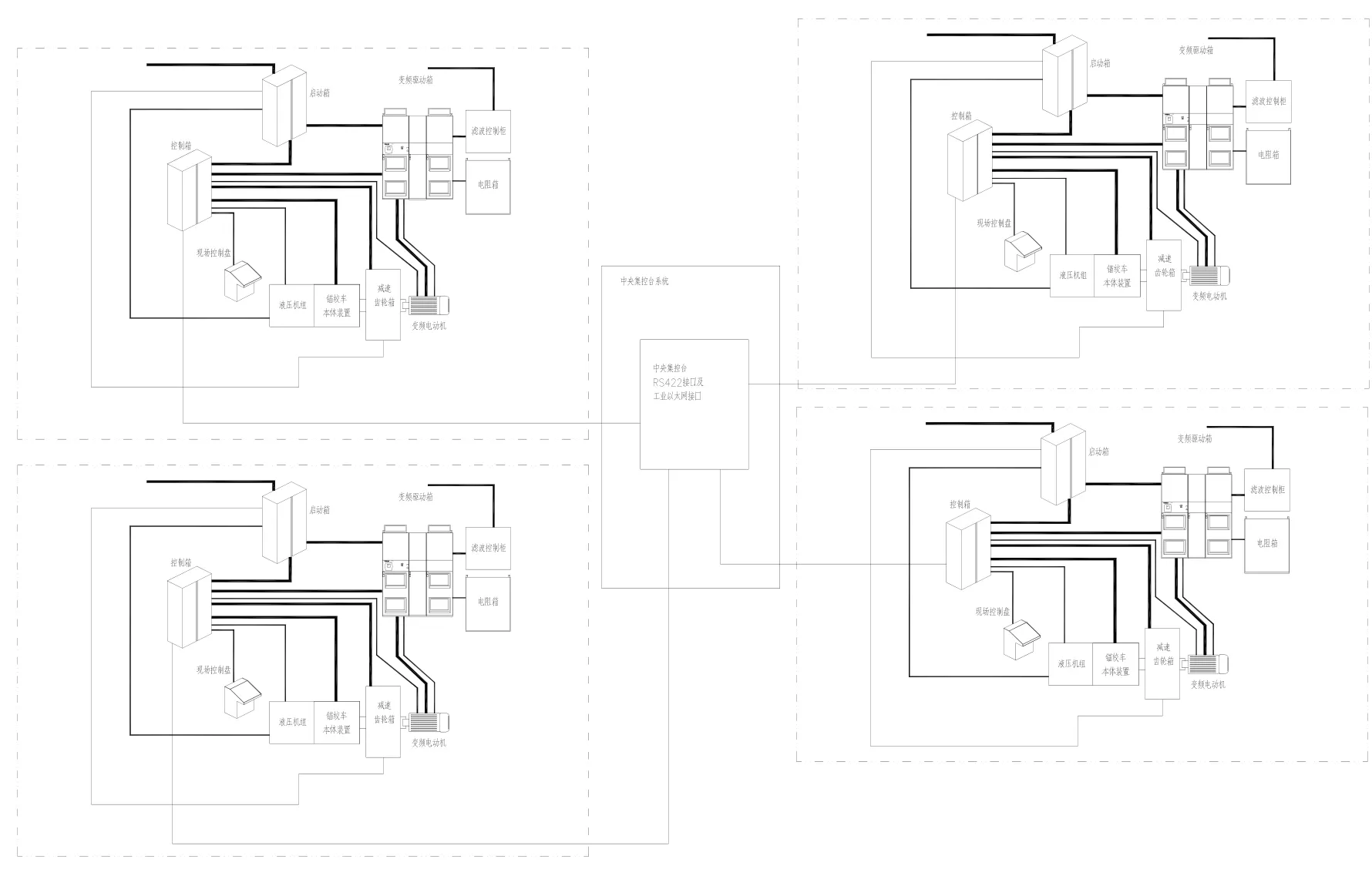
圖1 整船電控系統控制示意圖
電控系統和機械結構主要具備以下幾個功能及特性:1)絞車拉力速度和纜繩放出長度檢測;2)剎車驅動電機關聯控制,實現動作功能同步;3)使用F-Safe型制動器的帶式剎車和盤式剎車;4)絞車動作狀態以及制動器、離合器動作狀態實時檢測;5)具有緊急停止按鈕,實現緊急情況下的快速停車;6)失電保護功能,在失電情況下能自動切斷電源,元器件復位;7)報警指示和功能狀態指示,為操作人員提供安全警示和操作提示。
2 操作控制方式與主要功能
系統操作主要涉及2個不同功能的站位:1)在絞車旁進行單機現場操作控制,通過機旁控制臺完成操控功能;2)全船多機集中控制,通過集中控制臺完成操控功能。在使用單機操作方式時,與其他錨點的操作控制沒有數據關聯。在使用集中控制方式時,操作人員在每個錨絞車的現場操作機位都可以觀察監測到其他錨點錨絞車的繩索張力變化情況[3-4]。
觸摸屏監視界面如圖 2所示,內容包括絞車工作狀態、變頻電機工作狀態、剎車狀態和離合器狀態等。在集中控制臺上操控絞車時,1名操作人員可以同時操作4臺絞車,操作界面實時提供了4臺錨絞車的狀態信息。操作人員數量得以減少,布錨效率得到了提高。
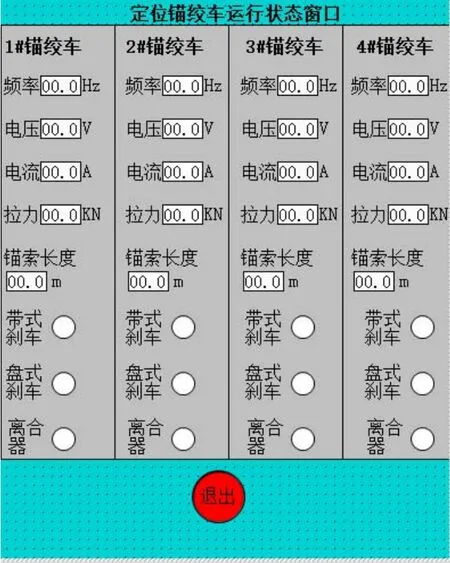
圖2 現場操作臺監控畫面
集中控制臺與每個絞車之間采用網絡連接,可實時交換數據,也可實現多絞車的聯動控制。集中控制臺的監視畫面如圖3所示。

圖3 集中控制臺觸摸屏監視畫面
定位錨絞車的主要包括下述功能。
1)動力收放錨。操縱控制手柄,使電機慢慢轉動,同時松開電機電磁剎車,觀察絞車所有狀態在面板上是否顯示正常。操作調速手柄時,觀察所有剎車是否處于完全脫開的位置。手柄角度調至最大時,收纜速度最大。收纜過程中,顯示屏上會顯示拋出纜繩的長度、速度和張力。纜繩達到預定長度后,可以通過減小調速手柄操作角度來降低收纜速度,調速手柄扳回到中間位置,電機電磁剎車實時制動響應。絞車運行過程中,操作人員要注意監測齒輪箱、液壓系統等的運行情況,例如是否出現溫升、噪音、漏油等現象。若有異常,應停車檢查處理。收放纜結束后,要及時將帶式剎車剎緊。若需要多次分多段收纜時,按上述步驟多次操作。收放纜過程中操作人員禁止離開操作崗位。
2)自由放纜。脫開離合器將帶式剎車松開,拋出纜繩。放纜過程中,顯示屏上應顯示拋出纜繩的長度、速度和張力。當拋出纜繩長度達到拋出要求時,停止放纜并及時將帶式剎車剎緊。
3)緊急停止。在絞車機旁操作臺上,按下“緊急停止”按鈕,帶式剎車剎緊,液壓泵站停止運行。
3 實船布放操作實踐
3.1 布錨流程確認
根據海域的實際海況,結合錨泊定位的功能需求,確定定位錨系統布錨程序、核定操作流程。根據作業任務要求,確定船舶定位原點、錨頭拋放坐標點、纜繩最大放出長度,確認繩索滿足作業要求。核定作業操作流程,協調船舶前后移船速度,確定錨絞車的拋錨操作規范,確定錨絞車的操作與船舶移動的協調方法,這項工作一般由船長組織。設備操作員觀察記錄設備工作狀態,根據操作指令進行錨機的收放操作,并及時報告設備工況以及錨機的收放長度、纜索拉力等信息。
3.2 布錨海況時機選擇
在首次布錨時,應該對定位錨絞車系統進行拋錨、收錨的操作調試,確認設備處于正常狀態。鋼纜錨絞車應事先對鋼索進行放氣操作,使鋼索的扭轉力得以釋放。
3.3 布錨前準備
準備好對講機,根據要求穿戴好救生衣,確定定位錨絞車系統設備主操作人員和輔助操作人員,清除工作區域內的障礙物,做好安全防護。全部準備工作應獲得指揮人員的認可。
3.4 布錨、起錨過程
錨絞車編號如下:左前錨機是 2#錨機,右前錨機1#錨機,左后錨機是4#錨機,右后錨機是3#號錨機。在陌生海域布錨時,應該模擬布錨航跡。
1)布錨程序。使用船上的定位系統確定定位點及4個錨點。船舶以任意航向到達 3#錨位并布下右艉錨3#。按圖 4a)所示航線,利用主機及艏側推裝置的輔助,正車駛向4#錨位。在航行過程中,右艉錨3#錨索放松,使其自由放出。如圖4b)所示,船舶到達4#錨位后布下左艉錨4#,同時船艏轉向圖示航線,利用主機正車駛向2#錨位,在此過程中,左艉錨4#錨索放松,使其自由放出。右艉錨 3#錨索則隨船舶位置的變化而收緊或放松。如圖4c)所示,船舶到達2#錨位后布下左艏錨 2#,同時按圖示航線,利用錨絞車及艏側推裝置駛向1#號錨位附近,布下右艏錨1#,見圖4d)。調整鋼纜,把船位調到指定定位點,船舶在定位點處定位,見圖4e)。所有定位錨錨索按所需張力收緊,待錨入土穩定后,再將錨索調至合適的預張力,至此布錨作業完畢。
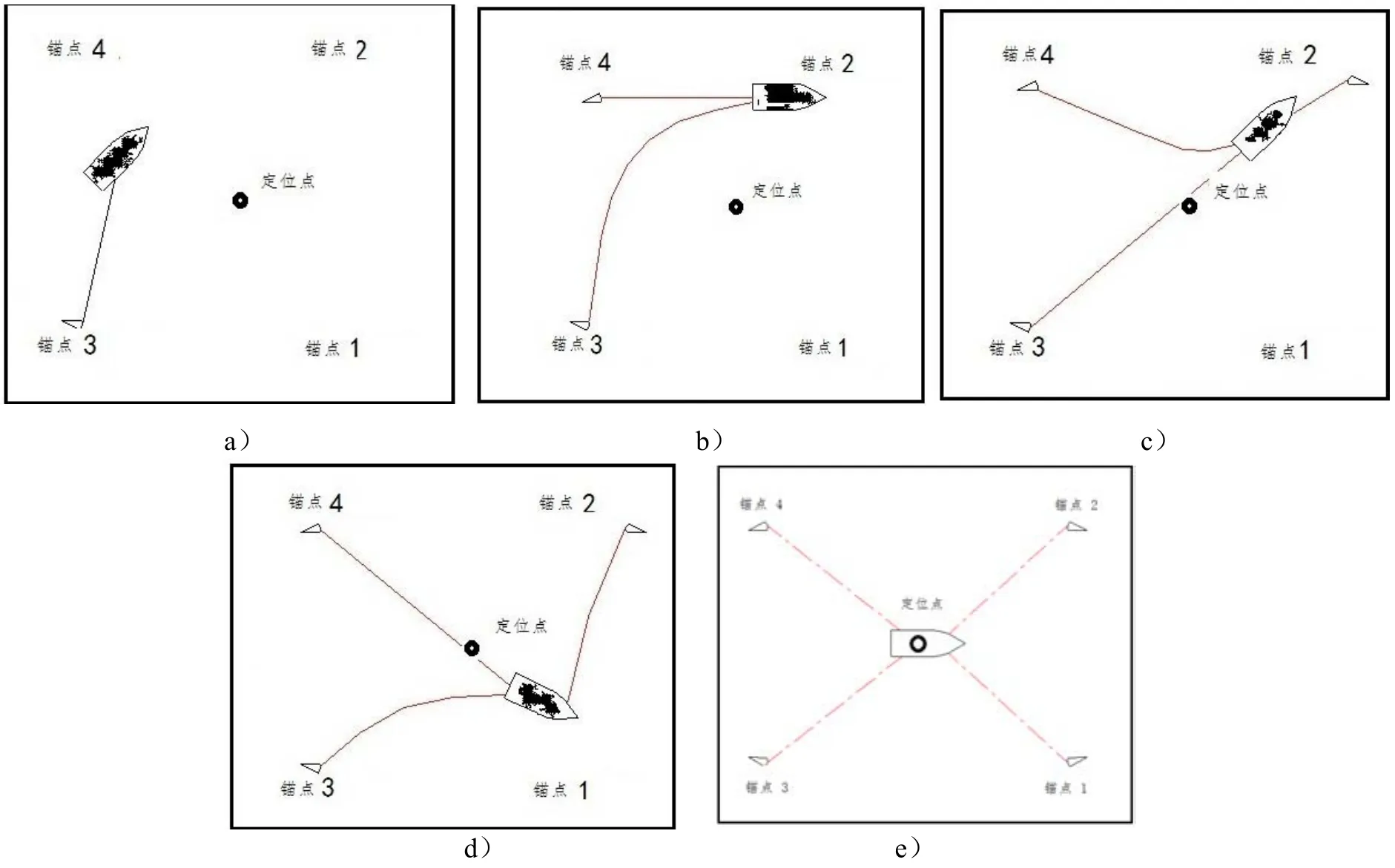
圖4 布錨程序示意圖
2)起錨程序。首先起右艏錨 1#,同時左艉錨 4#錨索放松,使其隨船舶移動自由放出;右艉錨 3#錨索視實際情況回收或放松;左艏錨 2#錨索視實際情況而放松;完成1#錨收存后,起左艏錨2#,同時右艉錨3#錨索放松,使其隨船舶移動自由放出;左艉錨4#錨索視纜繩受力情況適時回收,一般保持在額定拉力的15%的范圍內即可。完成2#錨收存后,起左艉錨4#,右艉錨3#錨索視纜繩受力情況適時回收,一般保持在額定拉力的15%的范圍內即可。最后起右艉錨3#,全部收錨過程完成。
3.5 后續維護
定錨鋼纜從導向器到定位錨絞車的路徑內鋪設三防布。三防布的寬度為2 m,待起錨時,用淡化水沖洗鋼纜表面的泥沙。在沖洗干凈的鋼絲繩上涂上事先準備好的鋼絲繩油,盡量涂抹均勻。
4 結束語
通過工程實踐,不斷總結錨泊定位系泊系統的布錨方式以及相關的操控和管理經驗,逐步形成系統、規范、安全、高效的操作規程,對海洋工程作業具有較為廣泛的推廣意義。未來,這項工作還將結合計算機人工智能的應用,以追求更高效的操控。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
