基于ANSYS WORKBENCH的六自由度工業機器人擺動臂靜力學分析與模態分析
2018-11-02 09:51:30陳繼文
制造業自動化 2018年10期
陳繼文
(山西機電職業技術學院,長治 046011)
0 引言
六自由度機器人運動靈活,在碼垛、搬運、焊接、裝配、噴涂等場合有著廣泛的應用。為了保證機械臂運行的可靠性,需要對其進行機械結構分析。使用實驗方法驗證機器人結構設計的合理性,成本高,周期長[1],傳統靜力學計算方法精度低,過程繁瑣。本文使用Pro/E軟件建立并簡化六自由度機器人模型,利用ANSYS對擺動臂進行靜力學分析,得到了擺動臂的應力和應變分布云圖,有效的提高了精度,降低了周期,節約了成本。模態分析可以用來研究結構動力學特性。本文依據數值模態分析理論,使用有限元分析方法得到了六自由度機器人的六階模態振動特性,得到了各個部件的固有頻率和振型,為機器人結構優化設計和改進提供了理論依據,為設計同類產品提供了借鑒。
1 六自由度機器人擺動臂有限元模型建立
1.1 建立幾何模型
六自由度機器人由底座、旋轉座、擺動臂、擺動關節、旋轉臂、腕關節組成。整機構造復雜,需要根據等效剛度代換理論對模型做簡化處理[2]。把齒輪嚙合簡化為孔和軸的配合,忽略固定構件、線路、電位器、外部柔性導線管等對計算機分析影響不大的特征和部件,將質量等效分布,結構中相同材料的剛性作一體化處理[3],機器人模型如圖1所示。

圖1 六自由度工業機器人模型
1.2 定義模型材料屬性及網格劃分
HT250耐磨性、減震性好,ZL108氣密性高,線收縮較小,熱膨脹系數低,六自由度機器人安裝底座使用HT250灰鑄鐵,旋轉座、擺動臂、擺動關節與旋轉臂均采用ZL108材料,材料屬性如表1所示。使用ANSYS WORKBENCH網格劃分工具對擺動臂進行網格劃分,網格劃分情況如圖2所示,六自由度機器人擺動臂的網格節點數為65972,網格單元數為87150。

表1 機器人擺動臂材料屬性
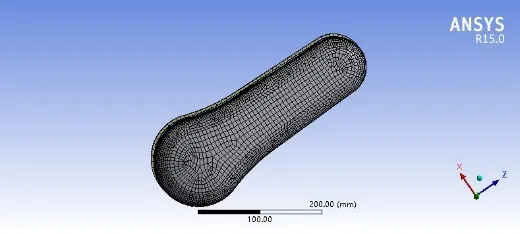
圖2 機器人擺動臂網格劃分結果
2 六自由度機器人擺動臂靜力學分析
2.1 施加載荷
當機器人擺動臂和旋轉臂均處于水平位置時,末端執行器的位移量最大,在該位置姿態下對六自由度機器人進行應力分析。以荷重0kg為例,擺動臂豎直方向受到機器人擺動關節、旋轉臂、腕關節的作用,總質量12.939kg,力的大小為126.802N,端面面積為0.0076969m3,產生的壓力為0.01647MPa,在Pro/E中測得力的作用點距離擺動臂端部沿臂展方向的距離為111mm,產生14075 N·mm的力矩,擺動臂上載荷情況如表2所示。
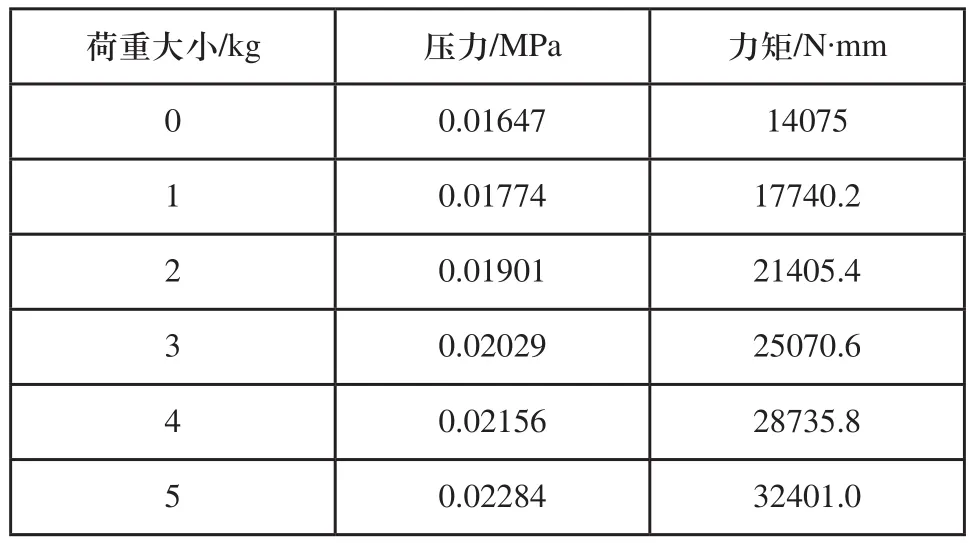
表2 機器人擺動臂載荷大小
2.2 應力分析
載荷和約束施加到擺動臂上后,進行求解,得到擺動臂在0~5kg荷重下的應力分布云圖3和應力大小表3。
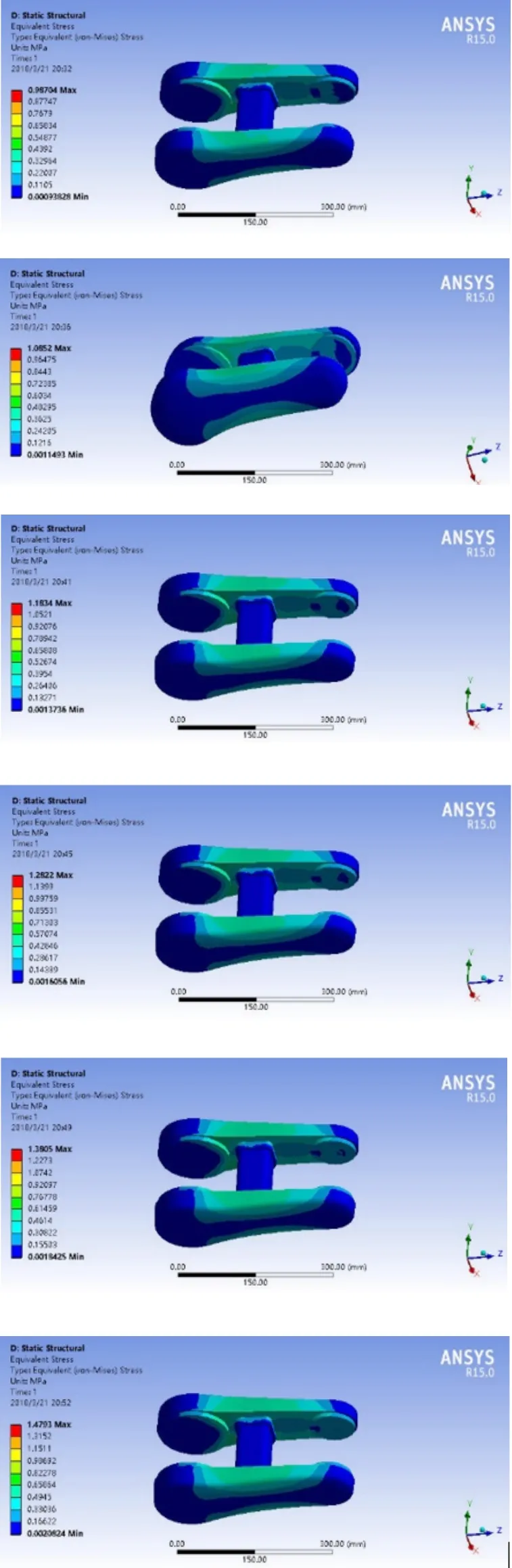
圖3 擺動臂在0~5kg荷重下的應力分布云圖

表3 擺動臂在0~5kg荷重下的應力大小

表4 擺動臂在0~5kg荷重下的應變
從圖3和表3可以看出,擺動臂在無荷重時,等效應力為0.98704MPa,荷重5kg時,應力達到1.4793MPa,該應力遠遠小于ZL108的屈服極限177MPa,滿足要求。同時,隨著機器人荷重的增加,最大應力隨之增大,但最大應力發生的位置基本保持不變,位于擺動臂與旋轉座連接處圓形端面的右側邊緣部位。
2.3 變形分析
載荷和約束施加到擺動臂上后,進行求解,得到擺動臂在0~5kg荷重下的總形變位移分布圖4和應變大小表4。

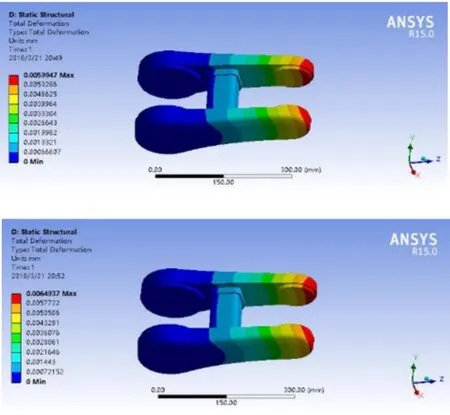
圖4 擺動臂在0~5kg荷重下的總應變分布云圖
從圖4和表4可以看出,無荷重時,六自由度機器人擺動臂的形變量為0.0040106mm,荷重5kg作用下,最大形變量為0.0064937mm,符合要求。同時,隨著機器人腕部荷重的增加,最大應變量隨之增大,但最大應變發生的位置基本保持不變,位于擺動臂右側頂端位置。
3 六自由度機器人擺動臂模態分析
六自由度機器人擺動臂無預載荷狀態下1~6階振型模態分析結果如圖5所示,頻率和變形量如表5所示。
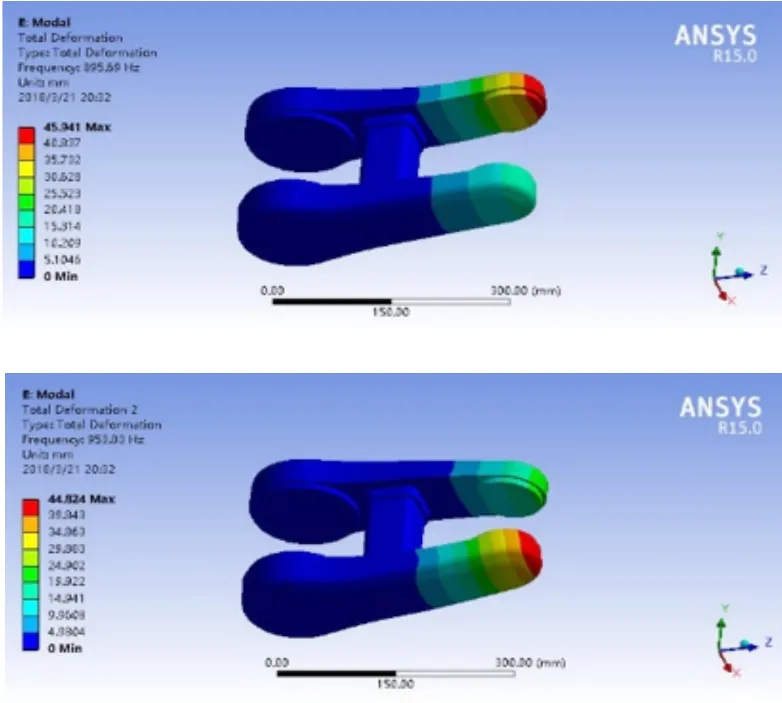

表5 無預載荷狀態下前6階固有頻率和變形量
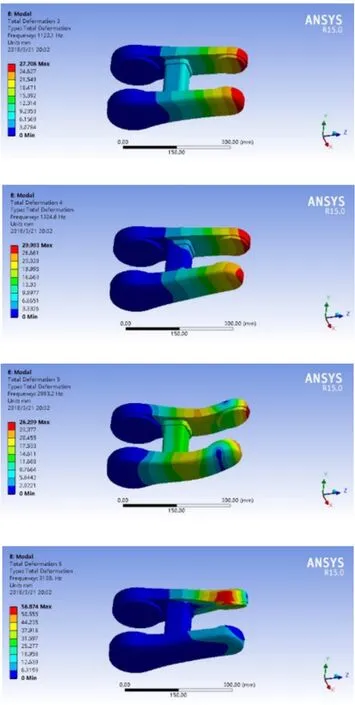
圖5 無預載荷狀態下前6階振型圖
根據圖5和表5可知,前6階振型中,固有頻率最低為895.69Hz,最高為3138.0Hz;第5階的最大變形量最小,為26.299mm,擺動臂前端沿著z軸方向左右振動;第6階的最大變形量最大,為56.874mm,擺動臂前端左臂繞著z方向順時針旋轉。運動機構伺服電機的額定轉速是3000r/min,頻率是50Hz,本模型擺動臂自身的剛度滿足要求,相對較為薄弱的部分是與擺動關節接觸的端部邊緣。
4 結論
1)利用Pro/E的三維建模和質量屬性測量功能,通過計算,完成了擺動臂的質量、質心、坐標的測量,并得到擺動關節、旋轉臂、腕關節等在擺動臂上的載荷大小、方向和作用位置,避免了繁瑣的實物測量過程和測量帶來的誤差。
2)提出了使用ANSYS WORKBENCH對六自由度機器人靜力分析,得到了擺動臂的應力云圖和形變位移分布圖,完成了強度和變形量的校核,六自由度機器人的危險位置在擺動臂與旋轉座連接處圓形端面的右側邊緣和擺動臂右側頂端。
3)研究了不同荷重對機器人擺動臂剛度的影響,隨著機器人腕部荷重的增加,最大應力隨之增大,應變也隨之增大,但最大應力和最大應變出現的位置基本保持不變。
4)完成了機器人擺動臂模態分析,實現了擺動臂的結構動力學分析,機器人在工作中應該避開危險頻率,避免共振現象的發生,找到了機械結構的薄弱環節,為六自由度機器人的設計優化及驅動選型提供了依據。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39