基于Flexsim的子母穿梭車的運(yùn)動(dòng)仿真研究
2018-11-02 09:51:36于宏飛
制造業(yè)自動(dòng)化 2018年10期
關(guān)鍵詞:模型
孫 慧,于宏飛
(山東科技大學(xué) 交通學(xué)院,青島 266590)
0 引言
隨著經(jīng)濟(jì)的快速發(fā)展,人們對(duì)物流效率的要求越來(lái)越高,制造型企業(yè)的物流倉(cāng)儲(chǔ)自動(dòng)化的發(fā)展也越來(lái)越快,高效的自動(dòng)化立體倉(cāng)庫(kù)應(yīng)也用于各行各業(yè)。越來(lái)越多的自動(dòng)化立體倉(cāng)庫(kù)在貨物出入庫(kù)方面都是依靠穿梭車系統(tǒng)來(lái)實(shí)現(xiàn)的,在此基礎(chǔ)上,雙向子母穿梭車應(yīng)運(yùn)而生,它進(jìn)一步提高了倉(cāng)儲(chǔ)物流的效率[1]。
子母穿梭車自動(dòng)化立體倉(cāng)庫(kù)是穿梭子車、穿梭母車、行走軌道、巷道貨架、托盤垂直提升機(jī)、托盤輸送系統(tǒng)、自動(dòng)控制系統(tǒng)、無(wú)線倉(cāng)儲(chǔ)控制系統(tǒng)(RWCS)、倉(cāng)儲(chǔ)管理軟件(WMS)等組成的全自動(dòng)密集式倉(cāng)儲(chǔ)系統(tǒng),該系統(tǒng)在每層均配置子母穿梭車,實(shí)現(xiàn)對(duì)當(dāng)前層的出入庫(kù)作業(yè),垂直方向通過(guò)提升機(jī)實(shí)現(xiàn)托盤貨物的垂直輸送。而其中的子母穿梭車,顧名思義,有一個(gè)子母的概念,就是母車承載著子車在倉(cāng)庫(kù)貨架間的軌道上行駛,當(dāng)取貨或者放貨時(shí),母車釋放子車進(jìn)行貨物的存取。由此可見(jiàn),子母穿梭車(如圖1所示)很好的適應(yīng)了現(xiàn)在的密集型自動(dòng)化立體倉(cāng)庫(kù)。這種倉(cāng)庫(kù)節(jié)約了存儲(chǔ)空間,子母穿梭車的加入使得出入庫(kù)存取貨物的效率提高,減少了作業(yè)等待時(shí)間,大大提高了工作效率[2]。
在智能物流規(guī)劃方案的設(shè)計(jì)中,求解及優(yōu)化自動(dòng)化立體倉(cāng)庫(kù)的貨位分配、出入庫(kù)效率、驗(yàn)證相應(yīng)的規(guī)劃算法及出入庫(kù)作業(yè)相關(guān)聯(lián)的設(shè)備運(yùn)行情況等問(wèn)題時(shí),采用三維仿真技術(shù)進(jìn)行模擬,通過(guò)分析仿真過(guò)程中產(chǎn)生的數(shù)據(jù),可以更為直接準(zhǔn)確地驗(yàn)證及優(yōu)化方案。而對(duì)于子母穿梭車來(lái)說(shuō),在Flexsim物流仿真軟件的實(shí)體庫(kù)中并沒(méi)有與之相對(duì)應(yīng)的實(shí)體對(duì)其進(jìn)行仿真模擬.本文以某物流配送中心多層穿梭車自動(dòng)化立體倉(cāng)庫(kù)為基礎(chǔ)并基于Flexsim對(duì)雙向子母穿梭車進(jìn)行運(yùn)動(dòng)仿真進(jìn)行研究。

圖1 工作中的子母穿梭車
1 思路概述
物流系統(tǒng)仿真是借助系統(tǒng)仿真技術(shù)研究物流系統(tǒng)行為,仿真模型是對(duì)現(xiàn)實(shí)系統(tǒng)的真實(shí)反映,并通過(guò)相應(yīng)技術(shù)得以在計(jì)算機(jī)上動(dòng)態(tài)展現(xiàn),是計(jì)算機(jī)仿真技術(shù)在物流工程領(lǐng)域的重要應(yīng)用。本文基于Flexsim仿真平臺(tái)構(gòu)建子母穿梭車自動(dòng)化立體倉(cāng)庫(kù)。
Flexsim是由美國(guó)Flexsim Software Production公司開發(fā)的一款離散事件仿真程序軟件[3],使用Flexsim可以建立一個(gè)真實(shí)物流系統(tǒng)的三維計(jì)算機(jī)模型。Flexsim實(shí)現(xiàn)的是離散系統(tǒng)的仿真,關(guān)注的是系統(tǒng)運(yùn)作過(guò)程中各個(gè)參與者之間的變化和相互之間的關(guān)系。建模時(shí),用模型庫(kù)里的某個(gè)對(duì)象,只需要用鼠標(biāo)把該對(duì)象從庫(kù)里拖出來(lái)放在模型視窗即可。其建模步驟如圖2所示。
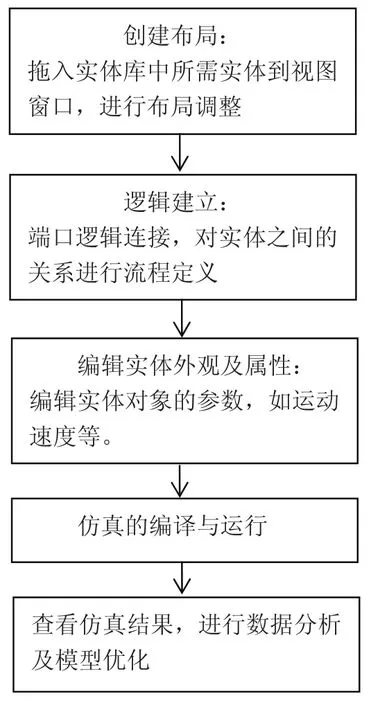
圖2 Flexsim建模基本步驟
子母穿梭車在Flexism軟件中是一種任務(wù)執(zhí)行器(TE),任務(wù)執(zhí)行器可以從固定資源類實(shí)體中獲取并執(zhí)行包括裝載、卸載、行走,延遲在內(nèi)的各類任務(wù),并且TE本身也可以向其他TE指派任務(wù),強(qiáng)大而靈活的任務(wù)執(zhí)行器二次開發(fā)功能使得Flexsim仿真模型能最大程度地還原實(shí)際系統(tǒng)。
子母穿梭車可以選用基本任務(wù)執(zhí)行器這個(gè)實(shí)體來(lái)進(jìn)行二次開發(fā),本文要解決的問(wèn)題是其運(yùn)動(dòng)學(xué)的仿真與取放貨的功能實(shí)現(xiàn)。在基本任務(wù)執(zhí)行器(BTE)中導(dǎo)入穿梭母車與穿梭子車的三維模型,在實(shí)體的屬性中寫入Flexsim自帶的腳本語(yǔ)言所提供的運(yùn)動(dòng)學(xué)函數(shù)與其他函數(shù),使穿梭車能夠根據(jù)設(shè)計(jì)要求進(jìn)行功能仿真。
2 實(shí)現(xiàn)過(guò)程
2.1 模型布局建立
某公司多層穿梭車自動(dòng)化立體倉(cāng)庫(kù)有十層,通過(guò)穿梭車來(lái)對(duì)貨物進(jìn)行入庫(kù)操作。該立庫(kù)有1個(gè)I/O站臺(tái),貨物入庫(kù)后,通過(guò)提升機(jī)送到每層的貨物交接處,當(dāng)貨物到達(dá)交接處時(shí)向穿梭車發(fā)出請(qǐng)求,如果穿梭車空閑,則穿梭車將相應(yīng)貨物運(yùn)送到當(dāng)前層的貨架中,完成放貨后,將會(huì)回到交接處等待區(qū)進(jìn)行等待。總體布局如圖3所示,子母穿梭車存貨如圖4所示。
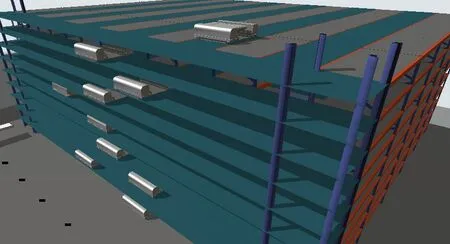
圖3 總體建模布局
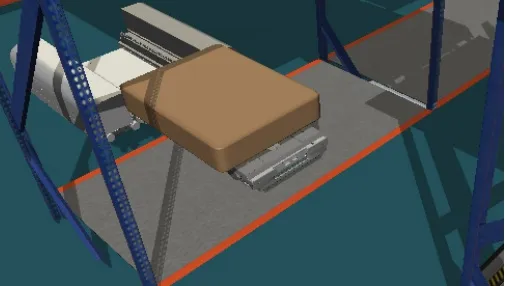
圖4 穿梭車子車伸出進(jìn)行存貨
2.2 作業(yè)流程
本文以多層穿梭車系統(tǒng)入庫(kù)作業(yè)為例,事件驅(qū)動(dòng)的作業(yè)流程描述如下:
當(dāng)子母穿梭車立體倉(cāng)庫(kù)入貨口收到貨物入庫(kù)任務(wù)請(qǐng)求時(shí),先由提升機(jī)負(fù)責(zé)垂直方向的運(yùn)輸,如此時(shí)提升機(jī)不為空閑狀態(tài),則貨物將進(jìn)行等待并加入提升機(jī)執(zhí)行的任務(wù)序列中,直至提升機(jī)完成上一次的任務(wù),并向入庫(kù)位移動(dòng),此時(shí)進(jìn)行貨物交接,由提升機(jī)垂直運(yùn)動(dòng)將貨物送到所在的水平層,到達(dá)水平層貨物交接處時(shí)請(qǐng)求穿梭車的調(diào)度服務(wù),如果此時(shí)該層穿梭車空閑,則穿梭車水平方向運(yùn)動(dòng)至貨物交接處,子母穿梭車伸出子車進(jìn)行貨物裝載,然后水平方向運(yùn)動(dòng)至貨物,由子車將貨物放置在貨位上,完成貨物放置后,返回至貨物交接處進(jìn)行等待,如有貨物,則進(jìn)行下一任務(wù)的貨物取放與運(yùn)動(dòng),從而完成該任務(wù)。
Flexsim實(shí)現(xiàn)的事件驅(qū)動(dòng)的離散仿真,通過(guò)事件激發(fā)來(lái)實(shí)現(xiàn)計(jì)算機(jī)邏輯,如圖5所示。
3 運(yùn)動(dòng)代碼實(shí)現(xiàn)
3.1 模型視圖三維外觀實(shí)現(xiàn)
雖然Flexsim仿真軟件有自己的實(shí)體庫(kù),但是默認(rèn)實(shí)體庫(kù)中沒(méi)有子母穿梭車這一實(shí)體。對(duì)于子母穿梭車物流系統(tǒng)仿真,要想獲得“真實(shí)”的效果,需要根據(jù)子母穿梭車的尺寸及比例,開發(fā)三維視圖。首先基于SoildWorks軟件進(jìn)行子母穿梭車的三維模型的開發(fā),將子母穿梭車的“子車”與“母車”用SoildWorks對(duì)模型進(jìn)行調(diào)整,之后在Flexsim中按比例恢復(fù)模型的形狀,模型導(dǎo)入Flexsim后,使用Edit 3Dshape Factors修正模型(如圖6所示)。選用基本任務(wù)執(zhí)行器(BTE)作為可視化工具及邏輯實(shí)體進(jìn)行建模開發(fā),BTE是為二次開發(fā)準(zhǔn)備的,它具有任務(wù)執(zhí)行器的可繼承性的功能,便于開發(fā)。
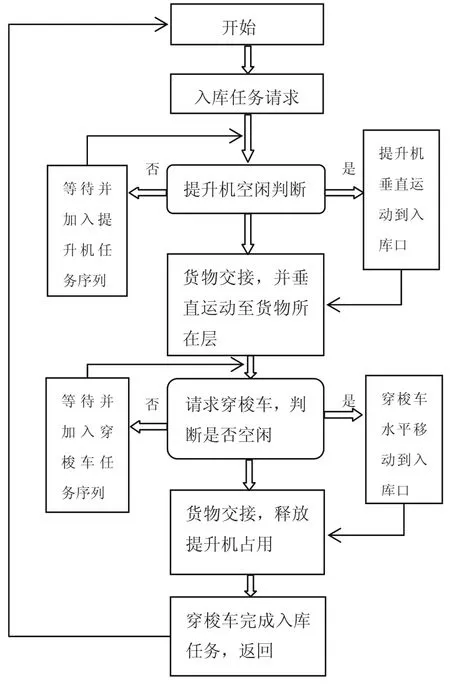
圖5 穿梭車系統(tǒng)入庫(kù)作業(yè)邏輯流程
根據(jù)以上步驟,完成三維外觀導(dǎo)入,如圖7所示。
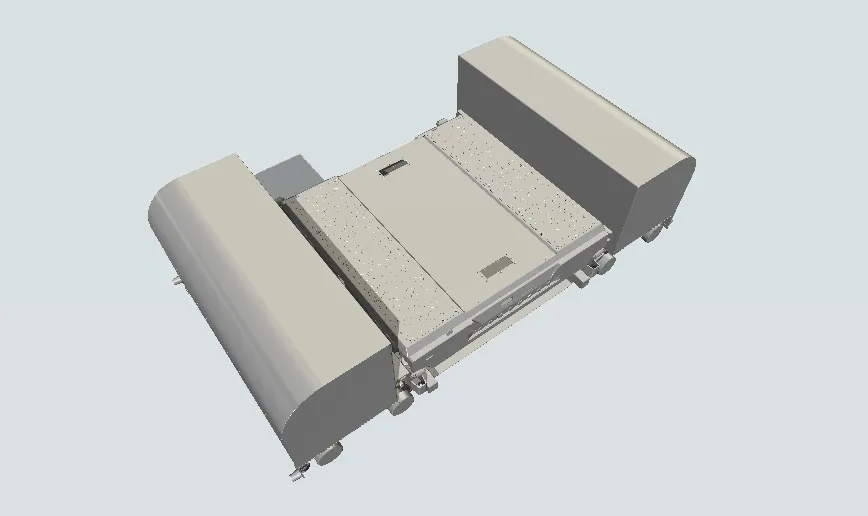
圖6 基于SoildWorks的子母穿梭車建模
3.2 主要運(yùn)動(dòng)邏輯程序代碼
3.2.1 取放貨實(shí)現(xiàn)
穿梭車在裝載與卸載時(shí)分別設(shè)定標(biāo)簽值,方便在穿梭車在運(yùn)動(dòng)學(xué)的編程中進(jìn)行邏輯狀態(tài)的判斷,在卸載時(shí)要判斷有沒(méi)有新的任務(wù),沒(méi)有的話則直接返回原點(diǎn)等待下一個(gè)任務(wù)。
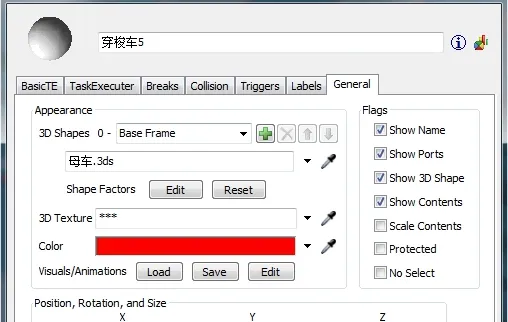
圖7 子母穿梭車導(dǎo)入BTE步驟
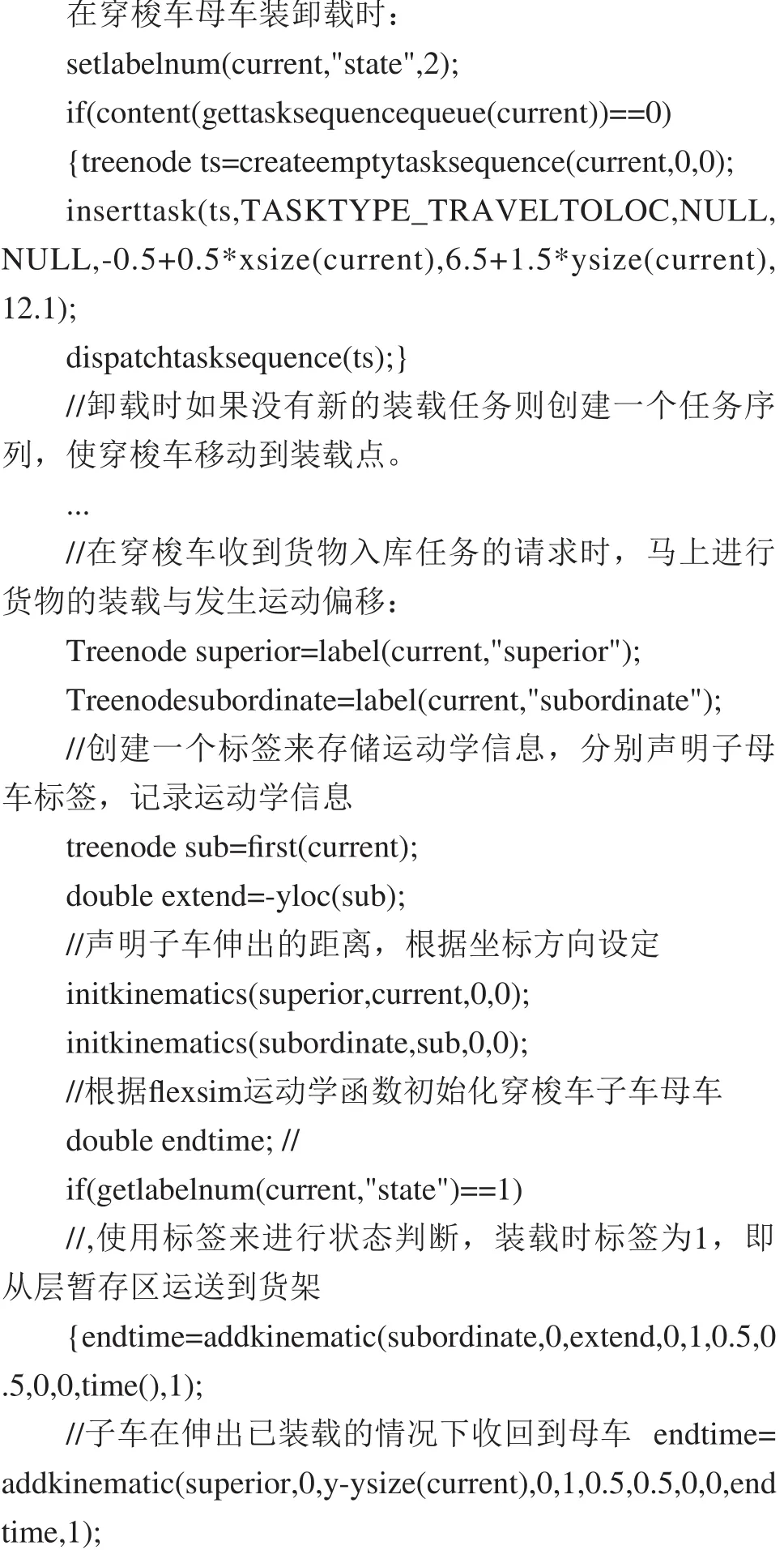
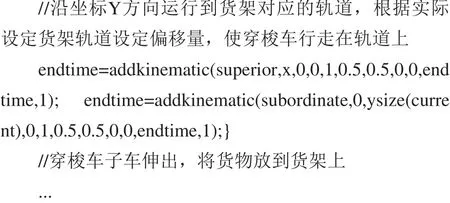
以上代碼在穿梭車收到裝載任務(wù)時(shí)觸發(fā),initkinematic命令的第一個(gè)參數(shù)必須指定一個(gè)空節(jié)點(diǎn),在節(jié)點(diǎn)中將儲(chǔ)存運(yùn)動(dòng)學(xué)信息的位置。在執(zhí)行裝載任務(wù)時(shí),首先穿梭車完成裝載后先將子車從貨物交接站臺(tái)上收回,然后在對(duì)應(yīng)的軌道進(jìn)行運(yùn)動(dòng),直到抵達(dá)卸載的貨架位進(jìn)行卸載。Flexsim的運(yùn)動(dòng)學(xué)功能用來(lái)使一個(gè)實(shí)體執(zhí)行多個(gè)運(yùn)動(dòng)操作,每個(gè)運(yùn)動(dòng)都可根據(jù)需要設(shè)定速度,旋轉(zhuǎn)參數(shù)等,在此模型中需要注意的一點(diǎn)是模型重置時(shí)需要寫入將運(yùn)動(dòng)學(xué)信息清空的代碼,否則就會(huì)出現(xiàn)重置時(shí)穿梭車出現(xiàn)在上次模型仿真停留的位置。使用運(yùn)動(dòng)學(xué)可以對(duì)任何實(shí)體進(jìn)行系統(tǒng)之外的動(dòng)畫自定義,使仿真模擬的三維效果接近實(shí)際。以上代碼在穿梭車收到相應(yīng)的裝載任務(wù)時(shí)觸發(fā), y-ysize(current)值的設(shè)定為軌道偏移量,使穿梭車能夠正好行走在貨架軌道處,看起來(lái)更加真實(shí)一些。
3.2.2 運(yùn)動(dòng)狀態(tài)判斷
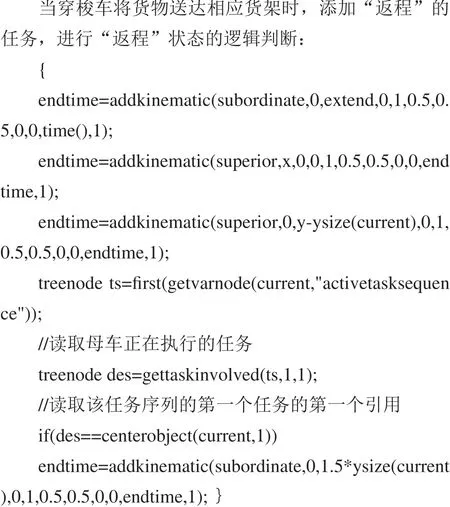
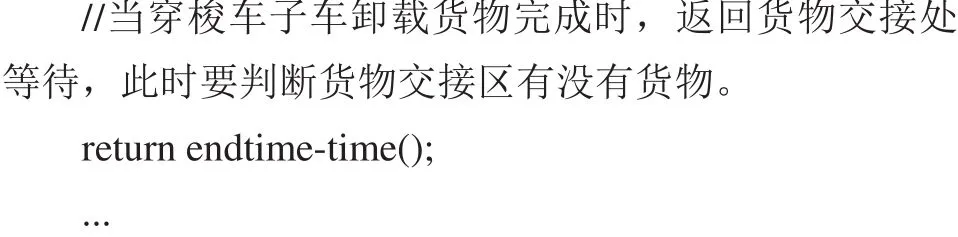
以上代碼在穿梭車收到相應(yīng)的卸載任務(wù)時(shí)觸發(fā),在完成卸載任務(wù)時(shí)將返回貨物交接處,如果貨物交接處有貨物,則伸出子車進(jìn)行裝載,繼續(xù)執(zhí)行任務(wù)。
3.3.3 運(yùn)動(dòng)視圖實(shí)現(xiàn)
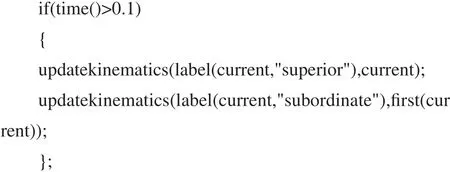
調(diào)用upadatekinemastic()命令,使穿梭車在執(zhí)行動(dòng)作過(guò)程中刷新視圖,否則會(huì)出現(xiàn)穿梭車在開始運(yùn)動(dòng)時(shí)一直停在原處,在運(yùn)動(dòng)結(jié)束后突然出現(xiàn)在目標(biāo)位置的情況[4]。此命令計(jì)算實(shí)體的當(dāng)前位置與轉(zhuǎn)角,在自定義繪圖代碼(customer draw)觸發(fā)器中觸發(fā)。
4 結(jié)論
貨架用子母穿梭車,是倉(cāng)儲(chǔ)密集存儲(chǔ)系統(tǒng)和自動(dòng)化系統(tǒng)完美結(jié)合,除了貨物的取放與分配之外,穿梭車還能夠與其他設(shè)備進(jìn)行互相協(xié)作,完成更多耗時(shí)耗力的作業(yè),比如穿梭車能與提升機(jī)或者AGV進(jìn)行配合,實(shí)現(xiàn)全自動(dòng)智能化的倉(cāng)儲(chǔ)物流目標(biāo)。在Flexsim中通過(guò)建模邏輯與運(yùn)動(dòng)學(xué)的二次開發(fā),通過(guò)用于某公司多層穿梭車自動(dòng)化立體倉(cāng)庫(kù)進(jìn)行建模,實(shí)現(xiàn)了子母穿梭車在Flexsim中的運(yùn)動(dòng)與取放貨的功能,驗(yàn)證了該研究方法的可行性,也為以后更深層次復(fù)雜的二次開發(fā)的仿真研究提供了思路。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19