基于超聲圖像處理的HIFU所致組織損傷自動檢測方法:實驗研究
2018-11-06 07:45:20錢盛友王潤民江劍輝
中國醫學影像技術 2018年10期
關鍵詞:區域
田 燦,錢盛友 *,鄒 孝,劉 備,王潤民,江劍輝
(1.湖南師范大學物理與信息科學學院,湖南 長沙 410081;2.深圳普羅惠仁醫學科技有限公司, 廣東 深圳 518067)
HIFU治療是近年興起的一種非侵入局部治療技術[1-2],其原理是使超聲波在目標區域聚焦,并形成局部高能量密度,組織溫度瞬間可達65℃以上,并產生凝固性壞死,從而達到治療腫瘤的目的[3-5]。HIFU治療腫瘤是基于熱機制對組織的損傷,因此治療過程中實時監測組織損傷非常重要[6-7]。通過HIFU治療中獲取的實時圖像,利用機器視覺技術自動檢測出生物組織變性的位置,可幫助臨床醫師快速、客觀定位治療損傷區域,更好地掌控療效進程和制定進一步的治療方案。現有超聲監控手段主要基于回波信號[8-9]和超聲聲像圖。相對于回波信號,超聲聲像圖更具直觀性。HIFU治療過程中獲取的超聲監控圖像可反映組織損傷情況[10-12]。馮艷玲等[13]對HIFU輻照前后圖像焦域附近進行二維亞像素級相關分析;陳華等[14]采用線性判別分析(linear discriminant analysis, LDA)方法對圖像提取的特征參數進行處理;顏佩等[15]提取減影圖像小波系數Hu矩等特征參數對組織損傷進行識別。上述方法均依賴圖像配準技術[16],且均需手動確定HIFU輻照區域,從而判別組織是否損傷。本研究根據HIFU輻照后超聲聲像圖中HIFU損傷區域的特點,采用粗定位和損傷識別相結合的方法,探討基于超聲圖像處理的HIFU所致組織損傷的自動檢測方法。
1 實驗系統與方法
實驗系統主要由HIFU源、超聲成像儀和計算機控制系統組成(圖1)。HIFU探頭為PRO2008系列(深圳普羅公司),以Philips EnVisor型超聲診斷系統獲取超聲聲像圖,并由PCI8001圖像采集卡輸入計算機。測試對象為新鮮離體豬肉。將離體豬肉置于HIFU探頭正下方,保存并分析HIFU輻照前后的超聲聲像圖。輻照后對離體豬肉切片進行肉眼觀察,記錄其損傷情況及位置,作為評價檢測結果的依據。
2 HIFU損傷區域粗定位
對HIFU輻照后超聲聲像圖進行灰度化處理后,截取ROI,使其包圍住測試樣本。①設計灰度極大區域搜索算法,定位圖像中所有亮斑;②結合數學形態學、連通域標記及Canny邊緣檢測算法提取測試對象的邊緣輪廓;③利用歐式判據篩選出HIFU損傷候選區。
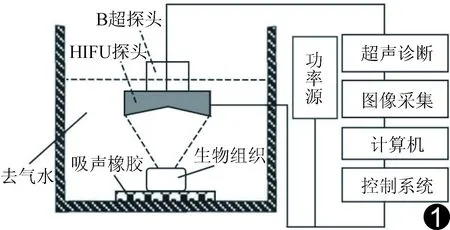
圖1 實驗系統示意圖
2.1灰度極大區域搜索 超聲聲像圖中HIFU損傷區域呈現為局部亮斑,可將其視為灰度極大區域,其灰度值在中心處最大,向四周逐漸變小。具體算法:①遍歷圖像中所有像素點,尋找灰度最大值點,如灰度最大值>灰度閾值(T),則該點可視為亮斑中心點,并保存其坐標值,以此為中心形成1個尺寸合適的矩形窗口;②將矩形窗口中所有像素灰度賦值為0后,再次遍歷圖像中所有像素點尋找灰度最大值點,以此類推,直到圖像上灰度最大值≤T為止,完成圖像上所有灰度極大區域的搜索。
由于超聲聲像圖中大部分亮斑為扁平狀,因此窗口應設計為寬大于高的矩形。通過前期實驗測試,最終認為以最大灰度值為中心,上下分別取5個像素點、左右分別取9個像素點,即矩形窗口尺寸為19×11,可較好地包圍住1個亮斑區域,同時又不影響相鄰的亮斑區域。通過分析圖像的灰度直方圖發現大部分像素分布在灰度均值(G)附近,形成1個單峰,亮斑中心點T應設在單峰右側(灰度值較大)像素數目較少處,故最終確定最優T為2G。
2.2測試對象邊緣輪廓提取 數學形態學是以形態結構元素為基礎對圖像進行分析的數學工具[17],其基本運算為膨脹和腐蝕。通過這2種基本運算可以生成許多其他的形態學運算。設f(x,y)是輸入圖像,b(x,y)是結構元素,用結構元素b對輸入圖像f進行膨脹和腐蝕的運算定義分別為:
(f⊕b)(s,t)=max{f(s-x,t-y)+b(x,y)|(s-x,t-y)∈Df,(x,y)∈Db}
(1)
(f⊙b)(s,t)=min{f(s+x,t+y)+b(x,y)|(s+x,t+y)∈Df,(x,y)∈Db}
(2)
先腐蝕后膨脹的過程為開運算,其定義為:
f·b=(f⊙b)⊕b
(3)
由于離體豬肉邊緣存在聲波反射,使其邊緣分布多個零散亮斑,如在原圖上直接提取豬肉邊緣,則這些亮斑處會明顯凹凸不平。為獲取平滑的邊緣輪廓,本研究利用開運算得到ROI背景圖,而后對背景圖進行閾值分割,并在二值圖像的正反圖像中2次使用連通域標記保留最大連通域[18],去除分離的白色和黑色干擾區域后,得到完整的目標區域二值圖像;最后利用Canny邊緣檢測算法得到目標區域的邊緣輪廓圖。
2.3篩選HIFU損傷候選區 利用灰度極大區域搜索算法定位圖像中所有亮斑后,為排除邊緣亮斑噪聲干擾,計算所有亮斑中心至邊緣線的歐式距離,篩選出HIFU損傷候選區。
設邊緣輪廓圖中灰度值為1的點橫坐標為X,縱坐標為Y,如存在n個亮斑,第i(i=1,2…n)個亮斑中心點橫坐標為m(i),縱坐標為n(i),計算第i個亮斑中心點至邊緣線的距離(d)為:
d[X,Y,m(i),n(i)]=

(4)
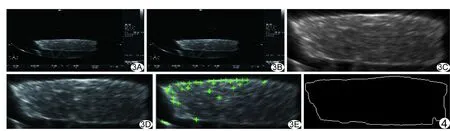
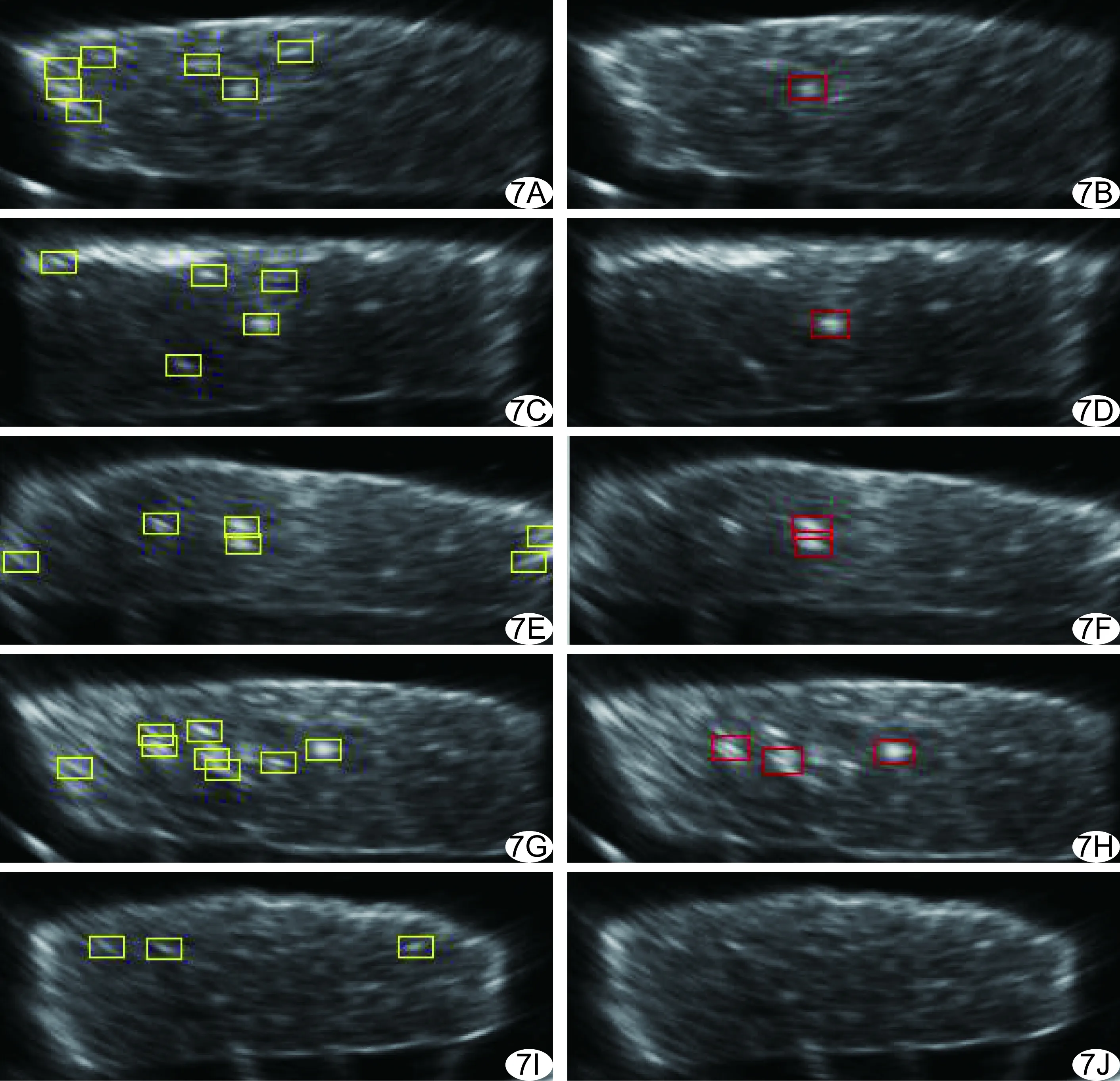
其中第i個亮斑中心點至邊緣線的最小距離記為dmin(i),設距離函數閾值為Tj。排除dmin(i) 粗定位中,根據亮斑分布位置特性,可排除大部分噪聲區。為進一步識別HIFU損傷,本研究最終選取可體現候選區HIFU損傷區和噪聲區差異的2個特征參數,即最大灰度值和掩模(MASK)圖的矩形度,并以支持向量機(support vector machine, SVM)分類器訓練和測試對其進行對比分析。 3.1特征提取 ①由于HIFU治療會導致圖像中焦點處灰度值最大,因此選取最大灰度值作為特征參數。經由粗定位得到多個HIFU損傷候選區后,截取候選區作為樣本并提取最大灰度值。將切片觀察到出現組織損傷的區域判定為HIFU損傷區,無損傷區域視為噪聲區。②矩形度特征參數的提取:由ROI原圖與其背景圖(通過數學形態學獲得)相減得到差值圖,選取其灰度直方圖右側波谷點的灰度值作為全局閾值,對其進行閾值分割,得到二值圖像為含有所有亮斑區域的MASK圖,截取其中與HIFU損傷候選區對應的部分,并提取矩形度。為證實MASK圖矩形度的有效性,利用8幅ROI原圖,分別獲取8個HIFU損傷區(圖2A)和8個噪聲區對應的MASK圖樣本(圖2B)。HIFU損傷和噪聲MASK圖樣本形狀存在差異,矩形度能夠區分不規則形狀,提示選取矩形度作為特征參數可有效區分HIFU損傷區和噪聲區。 圖2 候選區樣本 A.HIFU損傷區MASK圖; B.噪聲區MASK圖 設H為目標(灰度值為1的區域)的垂直高度,W為目標的水平寬度,A為目標的面積,矩形度(recognition rate, R)的定義為: R=A/(H×W) (5) 利用矩形度的倒數(R′)=1/R作為矩形度的數字特征。2個特征參數分別反映HIFU損傷區的灰度特性和幾何特性。截取所有由ROI原圖粗定位得到的HIFU損傷候選區和MASK圖中對應部分作為樣本,分別提取最大灰度值和矩形度用于SVM訓練和測試。為驗證這2個特征參數能否有效識別HIFU損傷區,隨機選取4個HIFU損傷區和4個噪聲區的最大灰度值和R′,在HIFU損傷和噪聲圖像中,2個特征參數均有一定差值(表1),提示可通過SVM對其進行分類識別。 表1 HIFU損傷區和噪聲區的特征參數 3.2SVM分類 SVM算法的主要任務是尋找滿足樣本分類要求的最優超平面,實現對線性可分數據的最優分類[19-20]。本研究SVM分類器選擇徑向基核函數,并采用交叉驗證的方法選取最優參數,完成對HIFU損傷區域的分類識別。以正確識別率(correct recognition rate, Rc)和總識別率(summation recognition rate, Rs)來衡量系統的識別效果: 圖3 灰度極大區域搜索 A.HIFU輻照前聲像圖; B.HIFU輻照后聲像圖; C.HIFU輻照前ROI原圖; D.HIFU輻照后ROI原圖; E.灰度極大區域搜索結果, 綠色標記處為亮斑中心 圖4 離體豬肉邊緣輪廓 圖6 HIFU損傷識別 A、B.分別為最大灰度值訓練、矩形度訓練,紅色“+”為HIFU損傷區,綠色“*”為噪聲區,“o”為訓練SVM時的支持向量; C、D.分別為最大灰度值測試、矩形度測試,紅色“+”為HIFU損傷區,綠色“*”為噪聲區,“o”表示該點判別錯誤 (6) (7) HIFU損傷區域粗定位見圖3。利用數學形態學、連通域標記和Canny邊緣檢測算法提取的離體豬肉邊緣輪廓圖見圖4。通過提取上述邊緣輪廓,根據亮斑中心至邊緣的距離篩選出HIFU損傷候選區,粗定位最終結果見圖5。 本實驗選取53張HIFU輻照后ROI原圖,通過粗定位獲得346個候選區,截取候選區和其MASK圖中對應部分作為樣本,以186個作為訓練,160個作為測試。通過Matlab 2014a軟件編程,將2個特征參數分別輸入SVM中。SVM對訓練樣本的可視化圖見圖6A、6B,圖中HIFU損傷區大致分布在噪聲區上方,說明HIFU損傷區的2組特征參數大致高于噪聲區,即2組特征參數對HIFU損傷和噪聲具有一定區分能力。SVM對測試樣本的測試結果見圖6C、6D,錯誤識別基本集中在分界地帶。最大灰度值的正確識別率和總識別率分別為83.33%和86.25%,矩形度的正確識別率和總識別率分別為91.25%和93.33%。 通過SVM訓練后的模型,以矩形度對5幅ROI原圖的HIFU損傷進行自動檢測,見圖7。與輻照后切片對比,發現圖7僅紅色標識處對應的豬肉組織呈白色亮塊,提示采用上述方法可檢測出HIFU損傷的位置,且可正確識別不存在損傷的圖像。 圖7 HIFU損傷自動檢測結果 A、B.1處HIFU損傷粗定位結果; C、D.1處HIFU損傷識別后的最終檢測結果; E、F.2處HIFU損傷粗定位結果及識別后的最終檢測結果; G、H.3處HIFU損傷粗定位結果及識別后最終檢測結果; I、J.無HIFU損傷粗定位結果及識別后最終檢測結果 黃色框為HIFU損傷候選區,紅色框中為HIFU損傷區 本研究采用先定位HIFU損傷候選區域,再通過SVM分類器進行識別的策略,同時利用灰度極大區域搜索算法實現HIFU損傷檢測的自動化過程。與傳統方法相比,本方法基于HIFU輻照后的超聲聲像圖進行研究分析,解決了HIFU輻照前后圖像必須進行配準的難題,有利于減少手動定位的誤差,為有效監控HIFU治療提供了重要方向。3 HIFU損傷識別





4 實驗結果與分析
5 結論
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15