一類非線性系統基于LS-SVM的自適應滑模控制
2018-11-21 03:55:04謝春利趙丹丹
大連民族大學學報 2018年5期
謝春利,趙丹丹
(大連民族大學 a.機電工程學院;b.計算機科學與工程學院,遼寧 大連 116605)
非線性不確定系統的滑模變結構控制一直是控制界關注的熱點,很多學者在此領域取得了研究成果[1-2]。由于非線性系統的滑模控制需要已知系統的粗略數學模型,因此增加了滑模控制對系統模型的依賴。隨著人工智能理論的發展,模糊邏輯和神經網絡被引入滑模控制設計中來,有效地減少了滑模控制對系統模型的依賴[3-4]。文獻[3]研究了基于高增益觀測器的非線性系統自適應模糊滑模控制,文獻[4]研究了基于神經網絡的非線性系統自適應滑模控制,它們主要是利用模糊邏輯或神經網絡對任意非線性逼近的能力。但是,模糊邏輯和神經網絡應用中存在算法復雜、學習速度慢等問題,而最小二乘支持向量機[5](Least Squares Support Vector Machines,LS-SVM)解決了上述問題。LS-SVM保持了標準SVM的強大泛化和全局最優能力,極大地提高了訓練效率,同時基于LS-SVM的非線性系統控制研究取得了豐富成果[6-10]。但是,將LS-SVM和滑模變結構控制相結合的非線性不確定系統分析和設計的方法則相對較少。
本文針對一類包含不確定性和未知有界外部干擾的非線性系統,提出了一種基于李雅普諾夫(Lyapunov)函數的自適應滑模控制方法。該方法充分利用LS-SVM回歸的非線性函數逼近能力設計反饋線性化控制器,引入滑模控制補償LS-SVM回歸的逼近誤差及不確定外部干擾對系統輸出的影響,利用Lyapunov函數進行LS-SVM權值參數的調整,最后通過一個仿真實例對設計方案進行了驗證。
1 問題描述
考慮非線性不確定系統

(1)

控制目標就是基于LS-SVM回歸實現狀態反饋控制u=u(x,θ),以便保證閉環系統一致有界,跟蹤誤差小。為了實現目標,給出如下假設:
假設1.2 控制增益b滿足b≥bL>0,bL為b的下界。干擾d有界,假設其上界為D,即|d|≤D,給定D>0。
如果函數f(x)已知且干擾d=0,則狀態反饋控制器為

(2)
由式(1)和式(2)計算得到
e(n)+kne(n-1)+…+k1e=0 。
(3)
式(3)表明,通過適當選擇ki(i=1,2,…,n),就能保證sn+knsn-1+…+k1=0的所有根都在復平面左半平面,即limt→∞e1(t)=0。
2 基于LS-SVM回歸的自適應律設計
LS-SVM將最小二乘線性系統引入SVM,代替傳統的支持向量采用二次規劃方法求解分類和函數估計問題,算法的推導參見文獻[5]。
用于逼近控制器的LS-SVM回歸結構參見文獻[10],其輸入輸出關系為
u(x,θ)=θTβ。
(4)


設理想的權值參數向量為

(5)

u*=u(x,θ*)+ε(x),x∈Ωx?Rn。
(6)
式中,ε(x)為LS-SVM的逼近誤差,對任意的常數Δε>0,滿足|ε(x)|≤Δε。

定義滑模面為
s=KTe。
(7)
其中kn=1,則
=b(u*-u)-d。
(8)
根據式(6),設計滑模控制器為

(9)
式中,

(10)
取
δ(t) =max|d/b|+η,η>0
=D/b+η;
(11)
取權值參數向量的自適應律為
(12)
式中,Γθ>0是設計參數。
定理對于式(1)描述的非線性不確定系統,采用文獻[10]中的LS-SVM結構逼近式(2)中的u*,控制量取為式(9),權值參數向量自適應律為式(12),則閉環系統內所有信號有界。
證明:選擇如下Lyapunov函數

(13)
令V對時間求導數有

=s[bε(x)-bδ(t)sgn(s)-d]+
(14)
由式(12)可得

(15)
取η>Δε>0,利用式(11)可得

(16)
可知閉環系統是漸近穩定的。
3 仿真研究
考慮非線性不確定系統

(17)



圖1 狀態x1及期望輸出
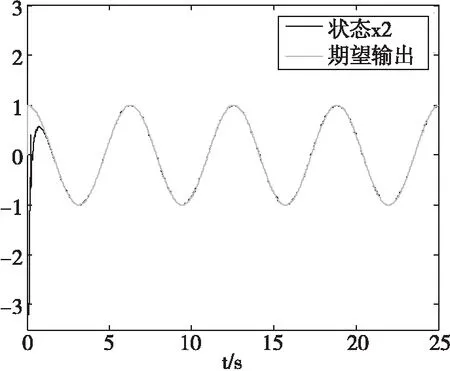
圖2 狀態x2及期望輸出
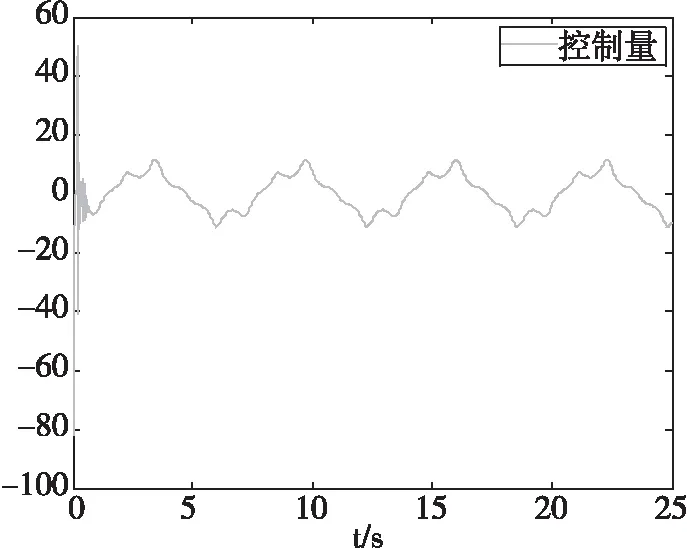
圖3 控制輸入
然后實現基于神經網絡的自適應滑模控制。神經網絡控制器結構和參數選取參考文獻[11]。基于神經網絡的自適應滑模控制的仿真結果如圖4、圖5和圖6。其中,兩種控制方法的跟蹤誤差曲線如圖7。對比跟蹤誤差曲線可知,基于LS-SVM方法的誤差平均值為-0.009 3,基于神經網絡方法的誤差平均值為-0.020 7,表明本文控制方法控制精度更高。

圖4 狀態x1及期望輸出
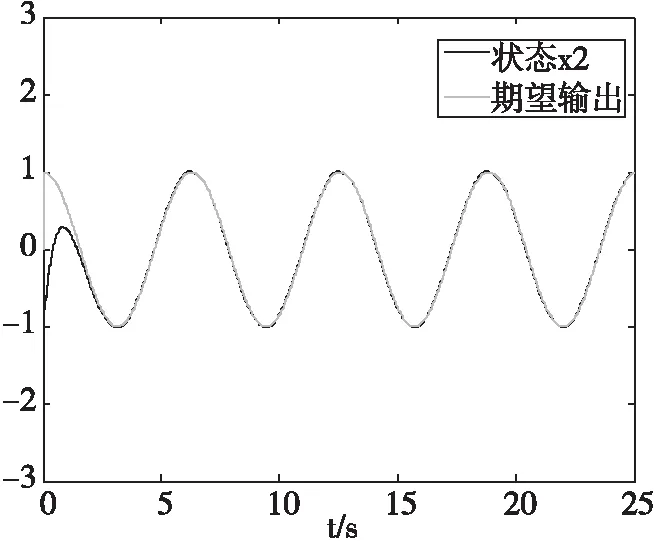
圖5 狀態x2及期望輸出

圖6 控制輸入

圖7 跟蹤誤差
4 結 論
本文研究了基于LS-SVM回歸的一類單輸入單輸出非線性不確定系統的自適應滑模控制問題。在控制系統的設計中,利用非線性系統的反饋線性化技術和LS-SVM回歸的任意非線性函數逼近能力構造反饋控制器,通過滑模控制技術來提高控制系統的魯棒性,并證明了所提控制方案可以保證閉環控制系統漸近穩定。仿真結果驗證了該方法的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12