俯視鄰近行人風險量化分析方法
2018-11-21 03:55:12黃俊達楊大偉
大連民族大學學報 2018年5期
黃俊達,楊大偉,毛 琳
(大連民族大學 機電工程學院,遼寧 大連 116605)
在人-車混行道路,分析街道中的風險行人對智能車載自主巡航系統尤為重要。本文提出一種行人風險量化分析方法,旨在為規避危險行人提供更充分的風險分析判決數據。
行人風險分析方法由多種算法模塊組成,具體包括目標檢測[1-2]、圖像分割[3-4]、目標跟蹤[5-6]和路徑檢測[7-8]等算法模塊。目前,單目視覺行人風險方法直接從單目平視視角進行風險判別,判定左右運動朝向與車行區域存在交集的行人為危險行人。此類算法具有實時性,但受到單目平視視角透視扭曲限制,難以預測行人運動軌跡,判據有失客觀性。Keller和Gavrila提出一種單目圖像行人姿態識別方法[9],以高斯動態模型和稀疏光流處理為核心,能夠有效識別行人運動朝向;文獻[10]為單目視覺行人運動姿態識別方法研究,作者對圖像進行稀疏光流分析獲取行人輪廓,通過計算行人運動姿態比獲得行人姿態和左右運動朝向判別結果。文獻[9-10]均未考慮人-車相對運動軌跡預測情況,存在判決方式簡易且缺乏客觀性問題。為使行人風險判據更加充分,針對單目圖像透視扭曲效應限制問題,Joko Hariyono等[11]在行人風險分析方法中引入了圖像逆透視映射。通過將圖像中行人坐標映射到世界坐標系,在世界坐標系中結合人-車距離、運動朝向和行人速度,分析行人預測軌跡并以此識別危險目標行人。但該方法僅實現對行人危險與否的二分類判決,沒有對不同行人的風險程度進行準確量化,判決數據不足以支撐自主巡航系統實現對行人的精確規避。王建強等[12]基于人工勢能場概念,提出了一種行人風險量化方法[13],該方法結合人-車-路三要素,在風險勢能場中使用斥力模型,獲得目標風險程度量化結果,該方法的缺陷在于風險程度量化因素主要為車輛與目標之間的相對距離,沒有考慮車輛與目標之間的預測運動情況。
為實現單目視覺人-車碰撞風險量化分析,本文提出俯視鄰近行人風險量化分析方法(Top view Risk Quantification analysis method for approach pedestrian,TRQ)。該方法引入圖像逆透視映射,將行人坐標從圖像坐標系映射至俯視二維世界坐標系,實現從圖像視角到車輛前方路面俯視視角的轉變。通過在俯視二維世界坐標系中構建車行風險場,計算行人預測軌跡坐標風險權重,量化獲得行人風險系數,并根據系數大小將行人目標判定為安全、警告和危險三種等級。該方法經實測視頻仿真驗證,能夠準確量化行人碰撞風險程度,并且行人目標風險等級的判定有助于改善無人車自主巡航能力,提高先進輔助駕駛系統危險預警性能。
1 TRQ方法
TRQ方法邏輯圖如圖1。

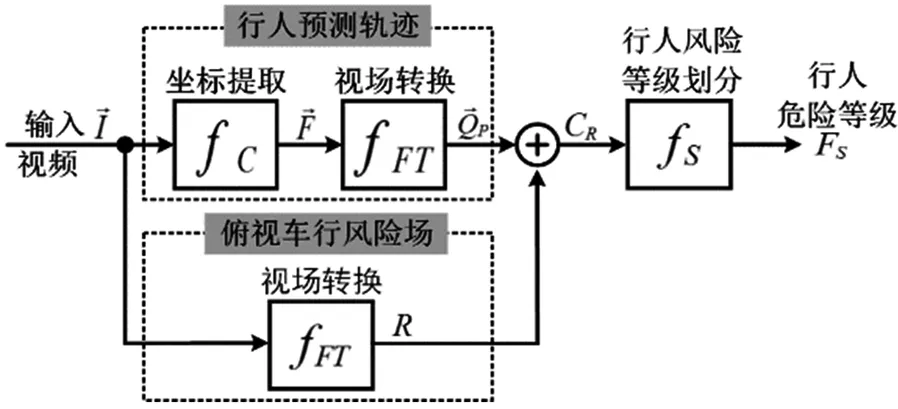
圖1 TRQ方法邏輯圖
1.1 行人預測軌跡
將車載攝像機固定裝配在汽車擋風玻璃處,鏡頭朝向與車行方向平行。平視行人軌跡如圖2(a)。OI為圖像坐標系原點,位于圖像左上角頂點;U代表圖像坐標系水平坐標軸,其正方向為水平向右;V是圖像坐標系豎直坐標軸,其正方向豎直向下。俯視二維世界坐標系即忽略高度軸的世界坐標系如圖2(b)。OW為世界坐標系原點,位于車載攝像機對地質心投影點處;YW為豎直方向坐標軸,其正方向為車行方向;XW為水平方向坐標軸,它與YW相互垂直以描述道路表面,其正方向為水平向右;四邊形ABCD包圍區域為圖像可視范圍。
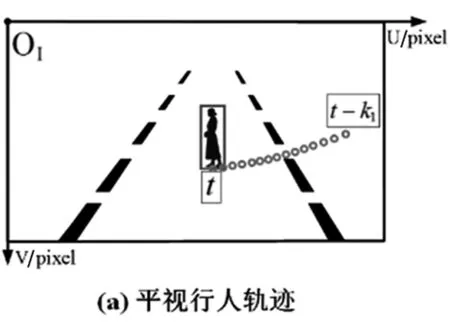
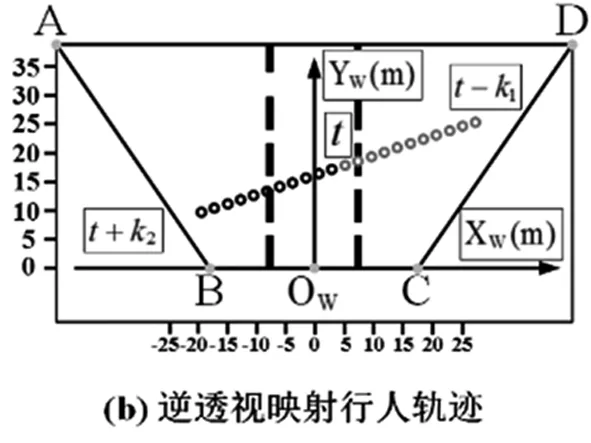
圖2 行人軌跡映射示意圖
(1)邏輯函數fC先后使用目標檢測算法[14]和目標分割算法[15],提取目標行人腳底坐標,得到平視行人軌跡坐標向量
(1)
式中,pF,i(ui,vi)為輸入視頻第i幀圖像中行人軌跡坐標;t表示輸入視頻實時幀且滿足t∈Ν+,即t可為輸入視頻中任意一幀圖像;k1為設定常數表示為預測行人軌跡所需歷史行人運動信息幀數。

(2)
式中:fFT為一種圖像逆透視映射方法[16];pT,i(xi,yi)為視頻第i幀在俯視二維世界坐標系中行人軌跡映射坐標點,i取值范圍與(1)中相同。
(3)使用最小二乘擬合方法計算俯視二維世界坐標系的線性回歸擬合直線,求取行人合速度v,并據此利用卡爾曼預報器遞推行人預測軌跡,計算俯視行人預測軌跡坐標為
(3)
式中,pP,c(xc,yc)為輸入視頻第c幀俯視行人預測軌跡坐標;k2為設定常數表示行人運動軌跡的預測幀數。
1.2 車行風險場
以俯視二維世界坐標系為參照坐標系,假定車輛相對靜止,車輛運動狀態將轉移給行人,則行人在原有速度基礎上疊加反向車速,產生對于XW軸反方向快速運動趨勢。當行人合速度方向趨近車輛防撞鋼梁位置時,人-車碰撞風險將快速上升。據此,將車行風險場R定義為車輛行駛在俯視二維世界坐標系中產生的碰撞風險影響,描述了俯視二維世界坐標系中行人相對車輛坐標位置的風險權重。車行風險場中風險權重關于YW軸對稱且沿YW軸正方向遞減,且當XW軸趨向±∞時,風險權重呈現遞減趨勢。
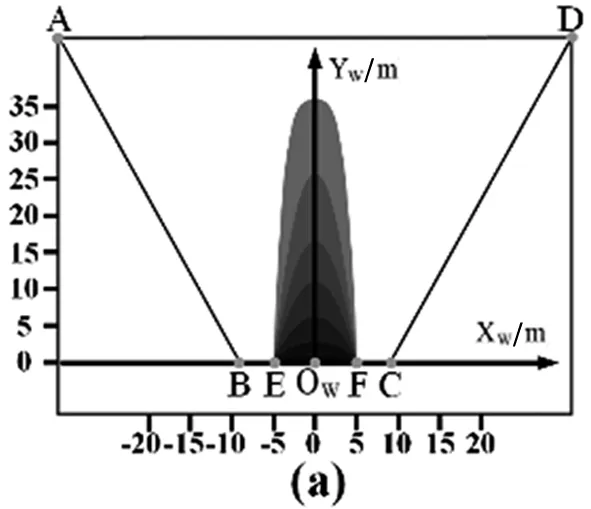
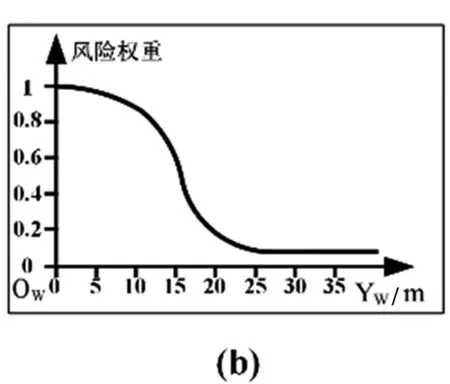
圖3 車行風險場示意圖
本文使用二階擬合函數描述俯視場中風險權重,等勢線分布如圖3(a)。四邊形ABCD所成區域為圖像可視范圍;線段EF為車頭位置。
俯視場風險權重等勢線表達式為
y=α1x2+α2x+α3。
(4)
式中:(x,y)為俯視二維世界坐標系中坐標;α1、α2和α3為擬合系數向量。在式(4)基礎上,以正態分布累積分布函數描述隨車前豎直方向距離相關的風險權重分布情況,得到YW-wr曲線如圖3(b),其式為
(5)
式中:wr為坐標對應風險權重;期望值μ和標準差σ受車速和車輛制動能力影響;C1和C2為風險權重歸一化系數。結合式(4)和式(5),計算俯視場中各坐標風險權重,以此構成風險俯視場R。
1.3 行人風險量化分析方法
(n,m)=fWM(x,y)
(6)
生成車行風險矩陣MV和行人軌跡矩陣MP,計算行人位置坐標對應風險權重,獲取歸一化行人風險系數CR。

矩陣MP可稀疏化表示為行人軌跡系數向量
(7)
式中,wp,i代表行人預測軌跡系數,且隨預測時序增加而逐漸遞減。利用矩陣內積篩選出MV矩陣中的計算向量
(8)

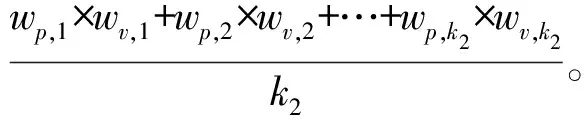
(9)
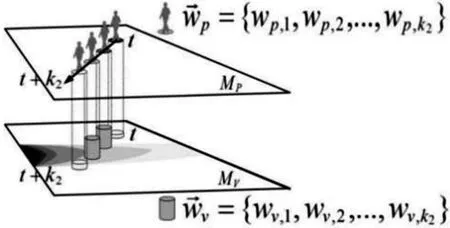
圖4 行人風險系數計算示意圖

(10)
行人風險系數實際上是風險系數向量累加的均值,且滿足CR∈[0,1]。
對歸一化行人風險系數進一步閾值劃分,實現行人目標危險等級判定。行人風險狀態閾值表達式為
{Cth,1,Cth,2|Cth,1≤Cth,2,Cth,1∈[0,1],
Cth,2∈[0,1]}。
(11)
式中,Cth,1和Cth,2代表“警告”閾值和“危險”閾值。使用式(12)可將行人目標判定為安全、警告或危險行人,并在圖像中給予相應S、W和D符號標識。
(12)
2 仿真分析
本文所提出TRQ方法在Windows 7操作系統下經Matlab R2014a軟件仿真驗證。車載單目相機裝配于距地面高度1.5 m;相機幀率設定為30幀·s-1;行車速度保持為15 km·h-1;參考歷史行人軌跡幀數k1為15幀,行人運動軌跡預測幀數k2為120幀;行人風險系數閾值參數設定Cth,1=0.20,Cth,2=0.55。
實驗數據包括3組實例場景行車視頻圖像數據組圖和行人運動狀態表。場景1行人風險量化分析結果如圖5,其中:圖(a)為視頻平視圖像的第54幀,包括行人1和行人2,二者初始位置相近,行人2速度快于行人1,忽略初始位置差距,看作兩人從相同位置出發,以不同速度橫穿馬路;圖(b)為行人運動狀態俯視示意圖,四邊形ABCD區域內為圖像成像區域,線段EF為車輛車頭部分,行人以空心點表示,箭頭方向即行人預測軌跡方向;圖(c)為行人風險系數預測曲線,其中橫坐標表示預測幀數,縱坐標則為量化風險系數。可以看出,行人2初始風險系數和整體風險曲線比行人1低。行人1風險系數持續上升至峰值為1,預測判定結果多為“危險”行人;行人2在上升至風險峰值0.40后下降為0,預測判定結果多為“警告”行人。曲線結果表明,行人1和行人2早期存在碰撞規避可能性;行人2后期成功規避行車可能性很高,行人1規避行車難度越來越高,直至無法規避行車。顯然,速度較慢而無法規避行車的行人1應該列為駕駛員或自主巡航系統的首要避碰對象。
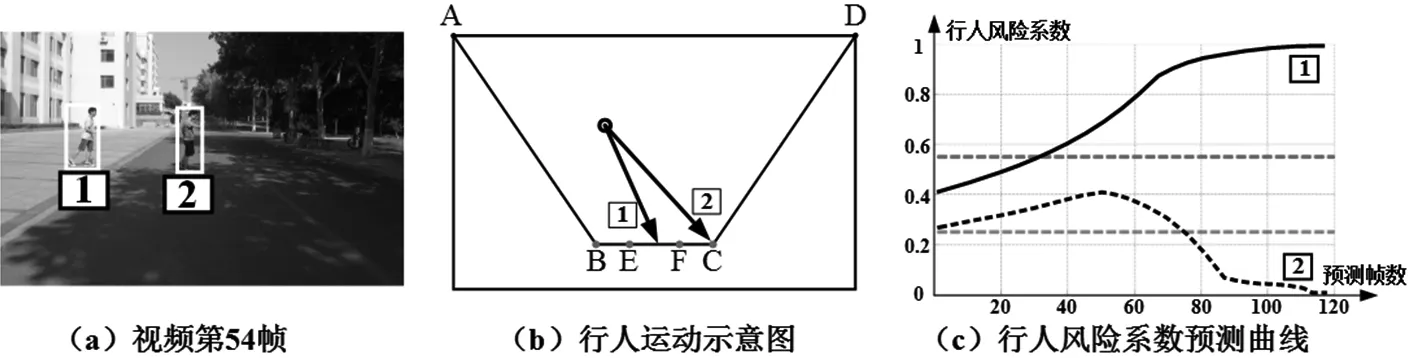
圖5 仿真場景1行人風險量化分析結果
場景2行人風險量化分析結果如圖6,其中:圖(a)為視頻第61幀圖像,包括行人3和4,二者以相同速度橫穿馬路;圖(b)預測結果顯示,兩人均成功規避車輛;圖(c)顯示行人3和4兩者風險系數變化趨勢相同,行人3整體風險系數高于行人4。行人3風險峰值為0.69,預測判定結果多為“危險”或“警告”行人;行人4風險峰值為0.33,預測判定結果多為“警告”行人。曲線結果表明,行人3和4能夠在很大程度上規避行車危險。可見,距離車輛較近的行人3比行人4更值得駕駛員或自主巡航系統警惕。
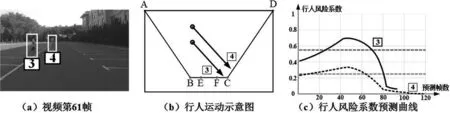
圖6 仿真場景2行人風險量化分析結果
場景3行人風險量化分析結果如圖7,其中:圖(a)為視頻第37幀圖像,行人5和6初始位置相近,視為初始位置相同行人;行人5早期速度與行人6相同,后期行人5開始加速;圖(b)顯示行人5加速后成功規避行車,而行人6則與車輛發生碰撞;由圖(c)中曲線可知,行人5風險峰值在早期與行人6相同為1,皆判定為“危險”行人;行人5加速后,其風險峰值變為0.63并下降至0,判定結果由“危險”行人轉為“安全”行人。曲線結果表明,在行人5改變運動狀態前,兩者因為無法規避行車而同樣值得關注;在行人5加速且能規避行車后,行人6變為行車首要避障目標。
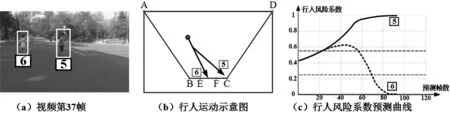
圖7 仿真場景3行人風險量化分析結果
三組實例場景中行人目標運動初始位置、速度、碰撞預測結果、風險系數峰值見表1。

表1 行人風險系數變化表
以上三組對照仿真實驗表明,對于速度、距離和運動狀態所產生不同預測軌跡的行人目標,TRQ方法所得實時行人風險系數、預測風險系數和行人預測風險系數曲線均符合實際情況,以此驗證TRQ方法的有效性。
3 結 語
針對車載單目視覺人-車碰撞風險量化問題,提出俯視鄰近行人風險量化分析方法。該方法利用圖像逆透視映射,將人-車相對運動分析平臺轉移至俯視二維世界坐標系,以此預測行人軌跡并構建車行風險場。通過進一步計算行人預測軌跡,量化行人風險系數并根據系數大小判定行人危險等級。經仿真驗證,TRQ方法針對任意運動狀態行人,能夠輸出合理行人風險系數,準確判定危險行人目標,且系數變化趨勢符合人-車相對運動情況。TRQ方法具有良好的工程價值,能夠為駕駛員以及自主汽車行車控制模塊提供數據基礎和決策,以此改善先進輔助駕駛系統數據可視化輔助性能,提高智能車載自主巡航能力。