基于ANSYS的六自由度工業機器人靜力學分析
2018-11-26 01:58:50
制造業自動化 2018年11期
(山西機電職業技術學院,長治 046011)
0 引言
工業生產中,六自由度機器人的應用非常普遍,工業機器人零部件的微小變形,會對機器人的精度產生影響,六自由度機器人的制造成本較高,開發周期較長,數值模擬能夠極大縮短開發周期,同時找到更加合理的設計方案[1~3]。使用Pro/E軟件確定機器人各個零部件的質量和相對位置,計算求得各個部分的載荷大小,在ANSYS中模擬,能夠直觀展現旋轉座、擺動臂、擺動關節、旋轉臂的應力和應變圖[4,5]。
1 六自由度機器人模型建立
1.1 建立幾何模型
六自由度機器人結構復雜,利用等效剛度代換理論,忽略線路、電位器、導線管等對計算結果影響不大的部件,將簡化后的旋轉座、擺動臂、擺動關節、旋轉臂作剛性一體化處理[6~8],得到機器人模型如圖1所示。
1.2 定義模型材料及網格劃分
六自由度機器人安裝底座使用耐磨性好的HT 250灰鑄鐵,旋轉座、擺動臂、擺動關節與旋轉臂均采用線收縮小的ZL 108,材料屬性如表1所示。使用ANSYS Workbench網格劃分工具對旋轉座、擺動臂、擺動關節、旋轉臂分別進行網格劃分,節點數和單元數如表2所示,網格劃分情況如圖2所示。
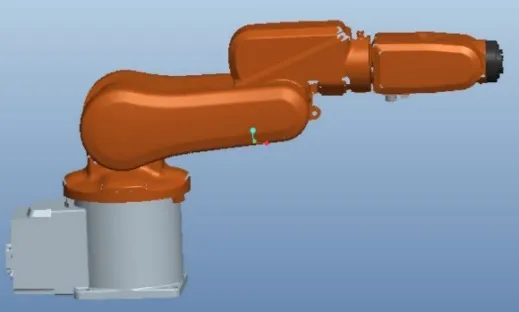
圖1 六自由度工業機器人模型
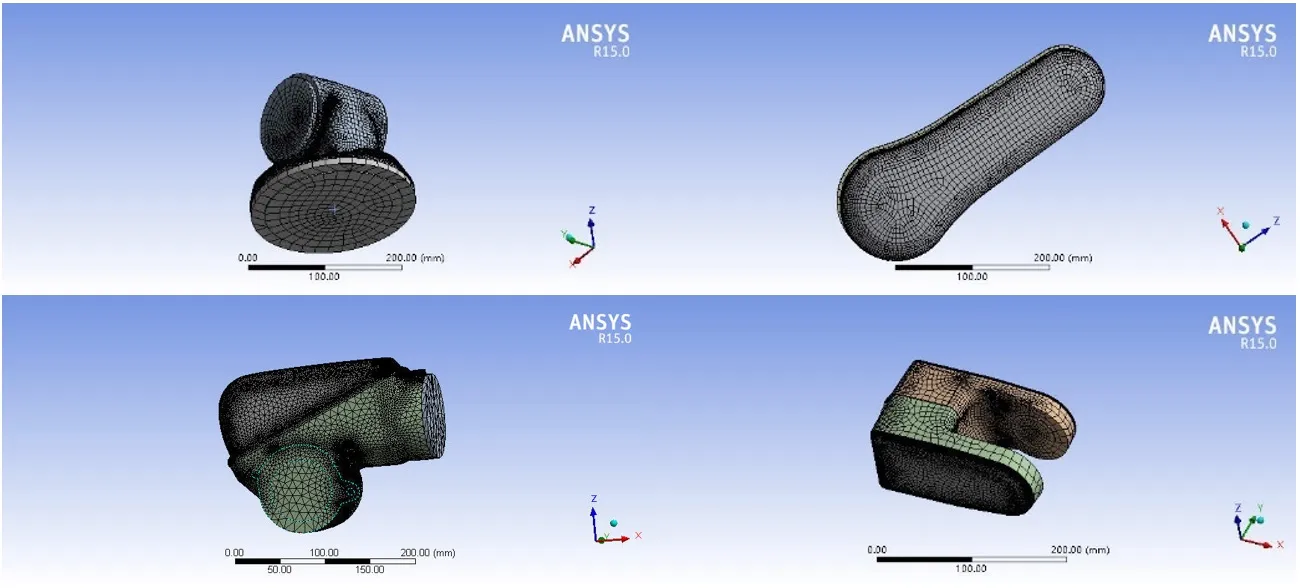
圖2 機器人零件網格劃分結果

表1 機器人零件材料屬性

表2 各零部件網格節點數與單元數
2 六自由度機器人零部件靜力學分析
2.1 施加載荷
機器人的末端執行器在水平位置的位移量最大,選取該位置進行分析。由于自身重力,機器人各部分位置不同,受力也不同。以擺動關節為例,豎直方向受到機器人旋轉臂和腕關節的作用,總質量為3.549kg,力的大小為49.490N,端面面積為0.003383m3,產生的壓力為0.01463MPa,在Pro/E中測得力的作用點距離擺動臂端部沿臂展方向的距離為98.26mm,產生4863N·mm的力矩。各部分的受力大小如下表3所示。
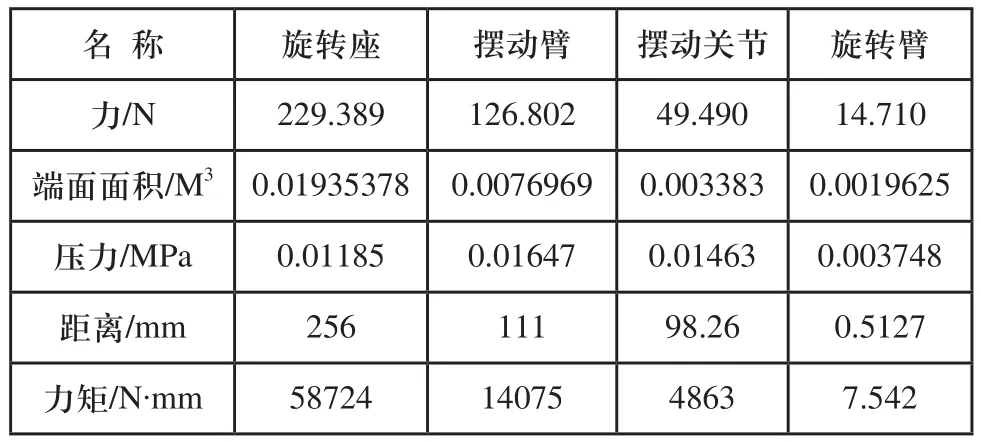
表3 機器人零件載荷大小
2.2 應力分析
無預加載荷狀態下,得到機器人零部件的應力分布云圖3和應力大小表4。
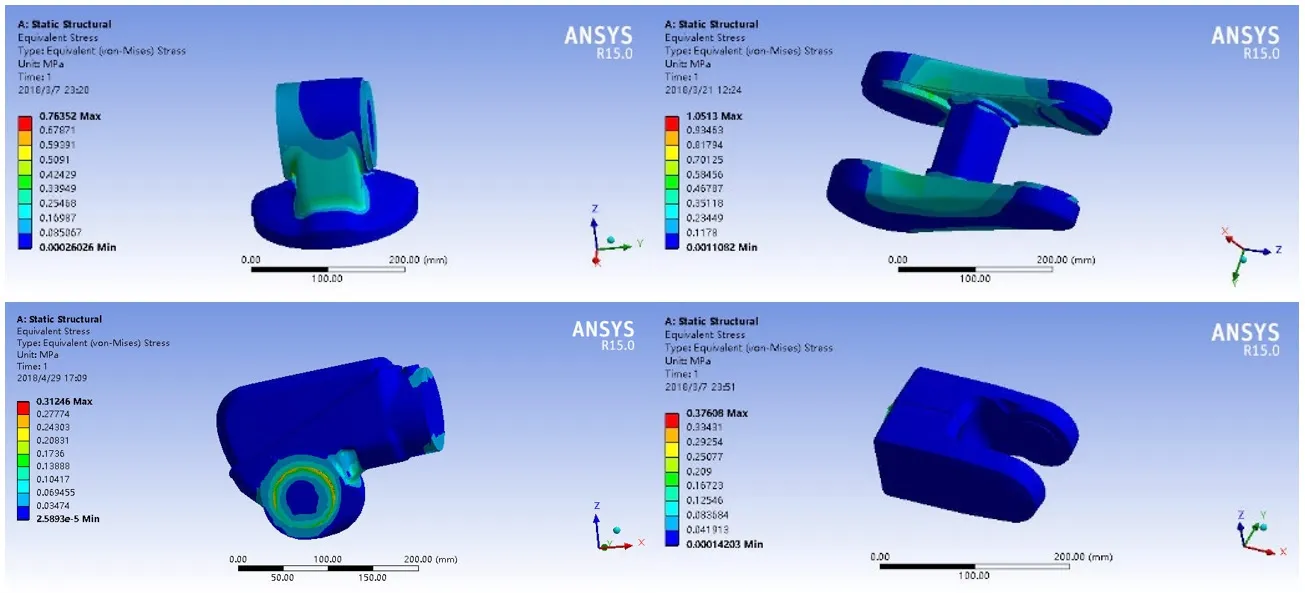
圖3 重力作用下的應力分布云圖

表4 重力作用下的應力大小
從圖3和表4可以看出,在無荷重時,機器人零部件中,旋轉座的最大應力為0.76352MPa,擺動臂的最大應力為1.0513MPa,擺動關節的最大應力為0.31246MPa,旋轉臂的最大應力為0.37608MPa,擺動臂承受的應力最大,為1.0513MPa,危險位置在與旋轉座連接處圓形端面的右側邊緣,擺動關節承受的應力最小。最大應力均遠遠小于ZL 108的許用應力。
2.3 應變分析
載荷和約束施加到擺動臂上后,進行求解,得到擺動臂無荷重下的總形變位移分布圖4和應變大小表5。
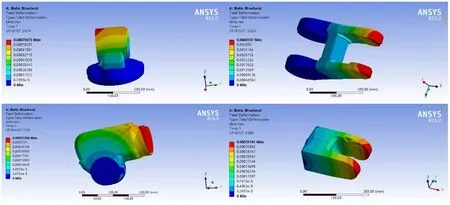
圖4 重力作用下的總應變分布云圖

表5 重力作用下的應變大小
從圖4和表5可以看出,無荷重時,機器人旋轉座的最大形變量為0.00079073mm,擺動臂的最大形變量為0.0040107mm,擺動關節的最大形變量為0.00031286 mm,旋轉臂的形變量為0.00035741mm,相比之下,擺動臂的應變最大,對于機器人精度的影響更大,應變最大的位置在擺動臂右側頂端。
3 結論
建立了六自由度工業機器人模型,使用Pro/E軟件得到機器人模型各個部分的質量、質心、坐標數據,使用ANSYS對機器人進行靜力學分析,獲得了機器人旋轉座、擺動臂、擺動關節、旋轉臂的應力和應變的變化規律。結果表明,在無荷重時,機器人零部件中擺動臂承受的應力最大,為1.0513MPa,危險位置在與旋轉座連接處圓形端面的右側邊緣,擺動關節承受的應力最小;無荷重時,六自由度機器人擺動臂的應變最大,為0.0040107mm,位于擺動臂右側頂端。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06