基于無人機影像的建筑三維模型重建方法研究
2018-11-27 09:07:42楊建強
城市道橋與防洪 2018年11期
關(guān)鍵詞:模型
楊建強
(上海市政工程設(shè)計研究總院(集團)有限公司,上海市200092)
0 引言
三維空間信息技術(shù)的發(fā)展非常迅速,傳統(tǒng)的二維平面圖對于三維空間的表達能力十分有限,難以滿足人們對三維空間信息的需求。鑒于此,國內(nèi)外眾多學者對于如何快速且有效地獲取空間三維信息并對其進行三維模型的重建展開了深入的科學研究。三維模型重建常用的方法有基于攝影測量和基于三維激光掃描技術(shù)等。其中,使用三維激光掃描儀對建筑物進行掃描獲得三維點云數(shù)據(jù),可以快速重建出建筑物的三維模型,但是對較高建筑物的屋頂卻無能為力。由于低空無人機具有成本低、操作靈活、受天氣影響小等特點,尤其適合于小區(qū)域的航空影像獲取,所以在建筑物三維重建中正發(fā)揮著越來越重要的作用。使用無人機可以充分地獲取建筑物表面豐富的顏色、紋理等信息,特別是能夠拍攝到地面三維激光掃描儀掃描不到的屋頂?shù)葏^(qū)域。同時由于影像匹配算法的發(fā)展,無人機獲取到的影像可以生成建筑物帶色彩的三維點云,使建筑物的三維重建越來越方便與逼真。因此,研究基于無人機影像的建筑物三維模型重建方法,具有現(xiàn)實意義。
目前,國內(nèi)外對建筑物的三維重建都已經(jīng)取得了一些研究成果。邵振峰提出了一種基于航空立體影像對的人工地物三維提取和重建方法,并研究開發(fā)了一體化立體影像平臺,利用該平臺,可以實現(xiàn)部分較復雜房屋的三維重建[1]。翁姝提出了一種基于雷達數(shù)據(jù)和航攝圖像的區(qū)域建筑物三維重建技術(shù),但建筑物模型并不精細[2]。張龍?zhí)岢鲆环N結(jié)合自動重建和交互建模的兩階段建模系統(tǒng),從多個視角下拍攝的建筑物圖像出發(fā),快捷有效地構(gòu)建出建筑物的三維真實感模型[3]。Pueschel等使用小型無人機拍攝的序列影像,以及地面控制點處拍攝的影像,經(jīng)過了影像處理、模型重建,以及紋理貼圖等步驟生成了帶紋理的且具有高分辨率的蘭登伯格城堡的三維模型[4]。
現(xiàn)以某建筑物為研究對象,提出了一種基于無人機影像的建筑物三維模型重建方法。首先使用無人機對建筑物進行拍攝,影像匹配后獲得密集點云;然后使用掃描儀對無人機無法拍攝的一些區(qū)域進行掃描,并將掃描點云與影像生成點云進行配準;對點云預(yù)處理,再進行Delaunay三角網(wǎng)構(gòu)建,最后使用3D Max構(gòu)建精細化模型,并對模型進行質(zhì)量評估。
1 無人機影像與激光點云匹配
所研究的對象為某中學的一幢教學樓,表面色彩鮮艷,紋理豐富。教學樓墻面遮擋一般,可使用無人機拍攝屋頂和大部分的墻壁,對無人機無法飛行拍攝區(qū)域,采用地面激光掃描儀進行掃描補充。
1.1 屋頂影像密集點云生成
使用大疆無人機自帶相機對教學樓的屋頂采用航帶法連續(xù)拍攝,相機鏡頭垂直向下,與傳統(tǒng)航攝在航向和旁向重疊度的嚴格要求相比,輕型無人機的要求可適當放寬,航向重疊度一般設(shè)置為60%~80%,最小不得小于53%;旁向重疊度一般設(shè)置為15%~60%,最小不小于8%[5]。由此拍攝到49張像素大小為4 000×3 000的屋頂序列影像,如圖1所示。然后再采用PhotoScan軟件對屋頂影像進行密集匹配生成密集點云,如圖2所示。

圖1 教學樓屋頂影像圖示
圖2 教學樓屋頂密集點云圖示
1.2 墻面影像密集點云生成
以西立面為例,同樣采用航帶法對墻面進行垂直拍攝,得到16張連續(xù)運行,如圖3所示。

圖3 教學樓西立面影像圖示
使用PhotoScan軟件對墻面影像進行密集匹配生成密集點云,但是由于無人機GPS定位并不精確,且無人機的位置難以使用全站儀進行坐標測量,因此采用外加控制點坐標的方法求得墻面密集點云,控制點坐標見表1所列。由此獲得的教學樓西墻面密集點云,以及控制點位置如圖4所示,較好地還原了墻體的特征形狀以及墻體的色彩信息。
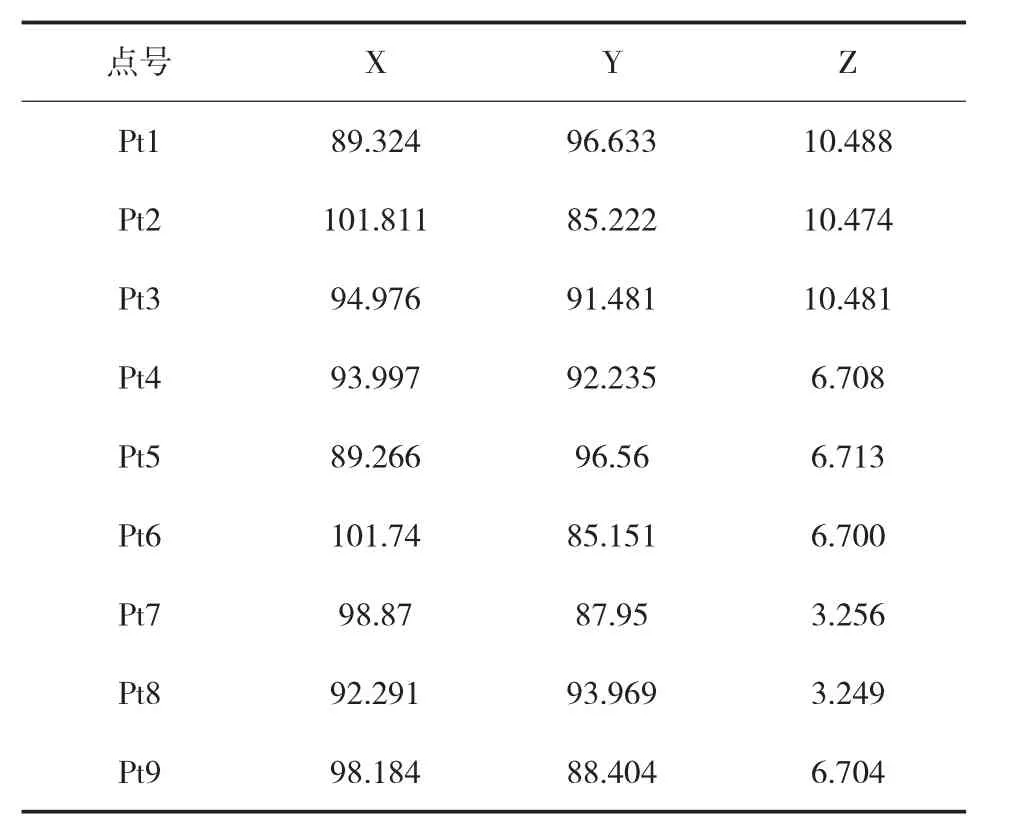
表1 建筑物表面控制點坐標表
1.3 密集點云與地面激光點云配準
1.3.1 墻面密集點云空洞修補
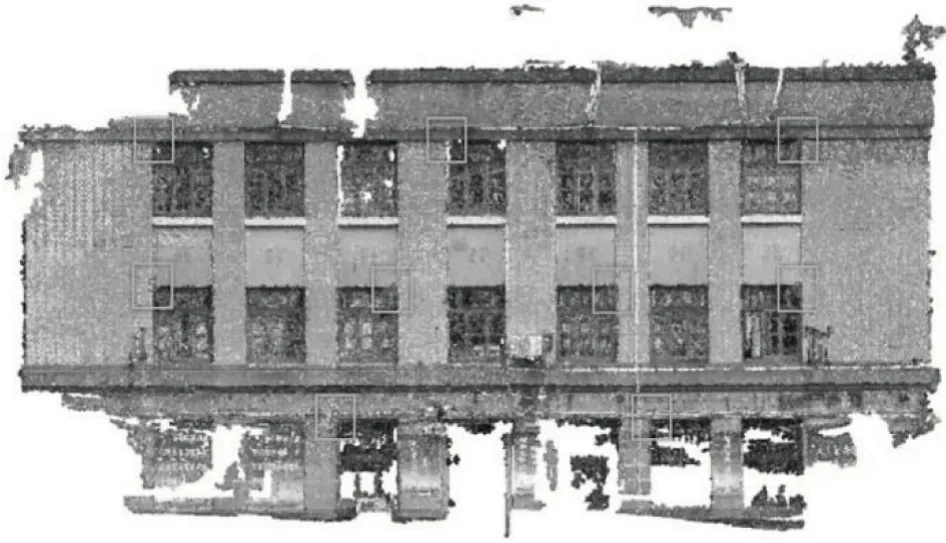
圖4 教學樓西立面密集點云圖示
墻面影像經(jīng)過軟件處理后獲得密集點云,能夠大體上反映出教學樓的形狀,但是由于遮擋,密集點云中還是存在一些空洞,給建筑物重建帶來一定困難,因此使用地面激光掃描點云來彌補空洞,并使用ICP算法進行配準。圖5的(紅)色框選范圍為點云空洞,圖6為激光掃描點云,圖7為配準后的點云。

圖5 密集三維點云空洞圖示
1.3.2 建筑物屋頂點云與墻面點云拼接
由于無人機GPS定位不精確,因此生成的屋頂點云比例尺不對,采取的解決方法是量測屋頂點云兩個角點A、B之間的水平距離DAB,并將其與前面配準后的墻面頂部角點點云A'和B'之間的水平距離DA'B'進行比較,確定放大的比例尺M為1.0165,這樣就可以得到正確的屋頂點云。其中圖8為屋頂點云圖,圖9為墻面點云俯視圖。將建筑物屋頂點云和墻面點云同時導入到Geomagic軟件中,固定墻面點云,人工移動屋頂點云,并將其與墻面點云精確拼接在一起,圖10為拼接后的某中學教學樓三維點云圖。
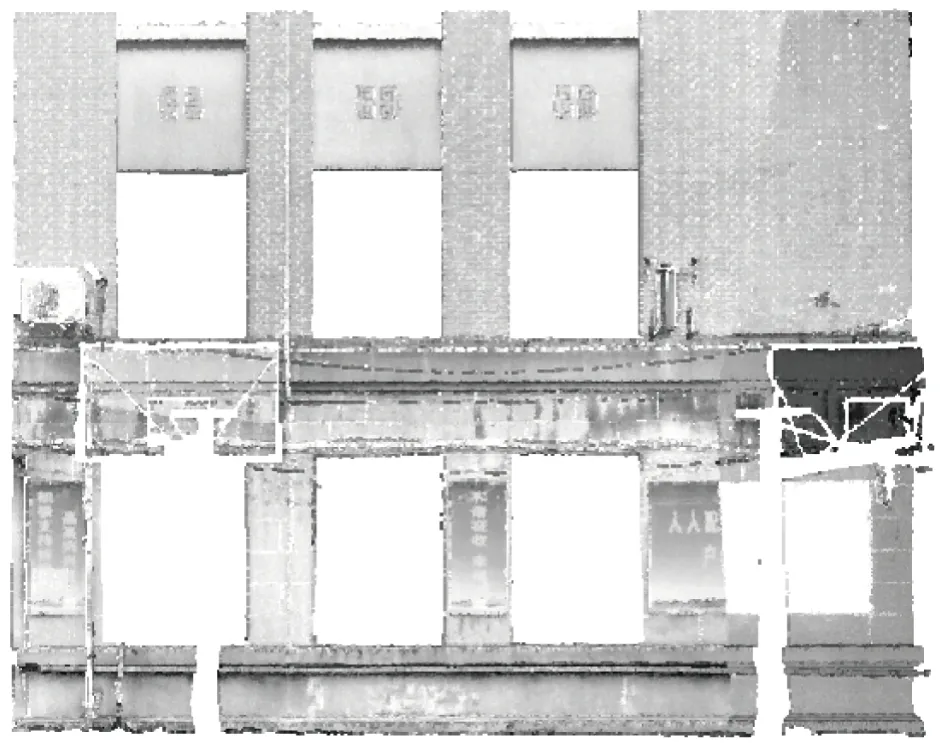
圖6 地面激光點云圖示
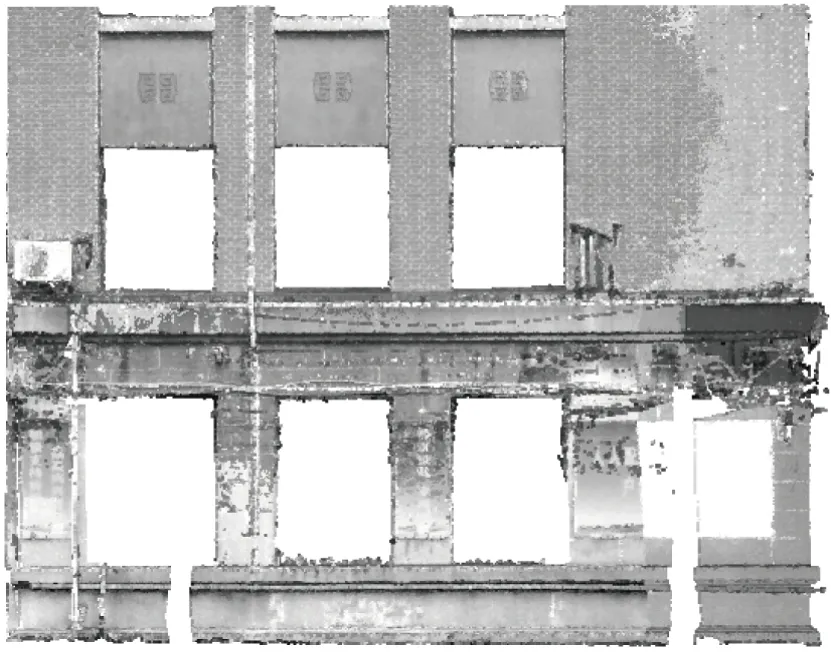
圖7 配準后的墻面點云圖示

圖8 屋頂點云圖示
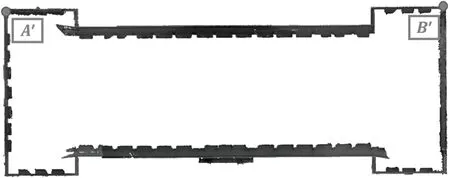
圖9 墻面點云俯視圖
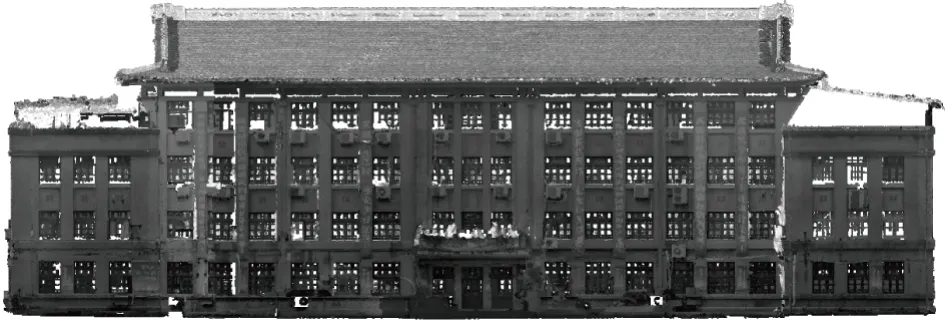
圖10 教學樓三維點云圖示
2 建筑物三維模型重建
2.1 點云數(shù)據(jù)預(yù)處理
經(jīng)過影像匹配生成密集點云,且與地面激光點云配準后獲得的建筑物表面點云數(shù)據(jù)不能直接用于建筑物三維建模,還需要進行點云數(shù)據(jù)預(yù)處理。包括點云壓縮、網(wǎng)格數(shù)據(jù)生成等[6]。點云壓縮方法有均勻采樣法、曲率估算法、平均點距值法等。本文使用Geomagic軟件提供的減少噪音和曲率法進行點云數(shù)據(jù)的去噪與壓縮,曲率采用率為60%,壓縮效果如圖11所示。再采用Delaunay三角剖分法建立的墻面網(wǎng)格,如圖12所示。
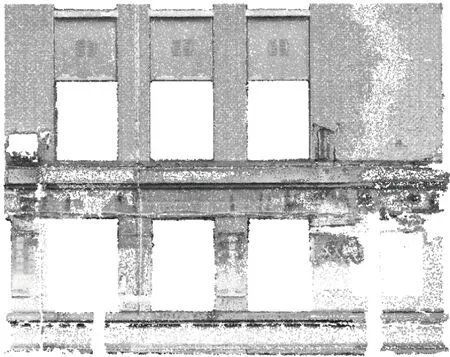
圖11 點云數(shù)據(jù)去噪與壓縮圖示
2.2 建筑物三維建模
對經(jīng)過點云預(yù)處理,以及三角網(wǎng)構(gòu)建后,得到了建筑物墻面的三角網(wǎng)格,同時建筑物的外形特征也能夠表現(xiàn)出來,但是這種方法得到的模型并不適用于有棱有角且外形規(guī)整的建筑物,因此使用3D Max對教學樓的模型進行精細化構(gòu)建,實現(xiàn)了建筑物的三維模型重建。
2.2.1 墻體建模
在對建筑物的墻體進行建模時,需要先將這一部分凍結(jié),其他不需要的部位隱藏,再從其它三個視圖對其進行建模。建模時需要開啟2.5維捕捉功能,使用“樣條線”對單墻面進行重繪,然后再使用矩形對窗戶進行繪制。在線的“修改器”面板下找到“附加”命令,將所有的窗戶和墻面附加在一起,運用“擠出”命令,擠出厚度為200 mm,再在頂部視圖中將建好的模型移動到真實的位置,對其余三面墻進行同樣的操作,并移動到合適的位置。
2.2.2 部件建模
建筑物部件主要包含了建筑物主體墻壁以外的門窗、雕花、斗拱、屋頂裝飾等部分。部件建模前需要開啟2.5維捕捉功能,并凍結(jié)需要構(gòu)建的部件。對門窗等規(guī)則的部件,使用“樣條線”里的矩形命令對其進行描繪,再使用“擠出”命令,擠出門窗的厚度即可;對雕花、斗拱、屋頂裝飾而言,則需要先使用“樣條線”里的直線命令描繪,然后使用“Bezier角點”命令來調(diào)整線條不規(guī)則的區(qū)域,使得描繪出來的線條與實際需求盡可能一致,最后再擠出實際的厚度即可。圖13為建筑物的各個部件。
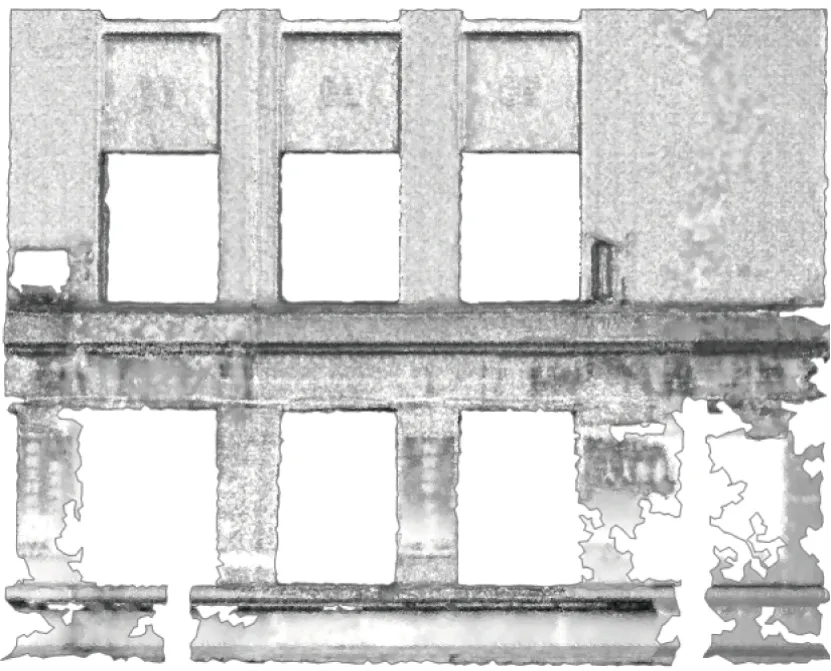
圖12 建筑物墻面點云封裝圖
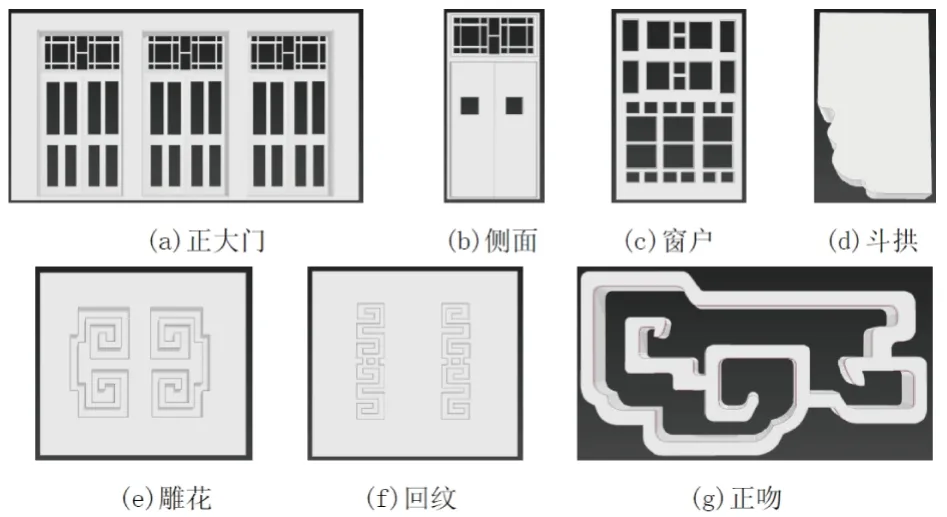
圖13 建筑物部件圖示
建筑物的所有部件建模完成后,將所有的部件都移動到正確的位置,生成建筑物的素模,再使用紋理貼圖功能將紋理貼到建筑物模型上,最后生成的建筑物模型如圖14所示。

圖14 教學樓樓體三維重建模型
2.3 建筑物模型質(zhì)量評價
建筑物的三維模型是利用影像或者點云數(shù)據(jù)進行重建得到的模型,對于客觀存在的實體,使用儀器采集的空間數(shù)據(jù)往往是不確定的,在原始數(shù)據(jù)采集、數(shù)據(jù)預(yù)處理和模型重建階段都存在著影響模型精度的因素,這往往導致了重建后模型精度的損失。因此,任何重建的建筑物三維模型實際上只能是對建筑物實際形態(tài)的近似模擬,不可能完全真實反映實際情況,重建的建筑物模型需要進行精度評價。為此,采用距離法進行精度評價,在教學樓的西立面,通過在重建后的墻面上選擇了8段特征線段,量測它們的距離。然后,使用全站儀在墻面上測量相同的點位坐標,計算其長度,將其與特征線段的長度比較,借以評定重建的精度。墻面特征點如圖15所示,特征線段的距離比較見表2所列。

圖15 墻面測距選點點位圖
由表2可知特征線的實測長度與模型量測長度存在一定的偏差,但偏差較小,最大偏差值為1.5 cm,平均誤差為10.6 mm,從距離比較結(jié)果來看,整體長度值偏差都在1.5 cm以內(nèi),能滿足一般的建筑物三維建模的要求。

表2 特征線段距離表
3 結(jié)語
本文以無人機影像為主要數(shù)據(jù)來源,以激光掃描點云數(shù)據(jù)作為補充,經(jīng)過影像匹配、密集點云生成、點云配準,以及使用3D Max建模等步驟實現(xiàn)了教學樓的精細化建模,并對其進行了質(zhì)量評價,結(jié)果表明三維重建質(zhì)量可靠,能夠滿足一般建筑物的建模要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19