四輪獨立電機驅動線控電動汽車的技術淺析
2018-11-29 02:05:10朱小春羅釗杰李穎全
汽車與駕駛維修(維修版) 2018年10期
朱小春、羅釗杰、李穎全
(深圳職業技術學院 518055)
面對能源緊缺和環境污染問題,中國已將電動汽車列為重點發展的新興戰略產業。迫切需要針對當前電動汽車發展過程中出現的共性和關鍵科學問題開展深入研究,支撐電動汽車技術和產業的發展[1]。近年來,四輪獨立電機驅動技術已經成為研究熱點,國外學者較早就開展了相關研究,比如日本慶應義塾大學Matsugaura S課題組,推出了交流同步輪轂電機獨立驅動的電動轎車KAZ,最高時速達到311 km/h[2]。國內高校近年來也加大了相關研究,比如清華大學和吉林大學等,對輪轂電機、電控及整車性能等方面進行了研究[3-4]。
四輪獨立電機驅動線控電動汽車技術,是無人駕駛汽車和智能網聯汽車的基礎,可顯著改善交通安全、實現節能減排并提高交通效率等,對促進汽車產業轉型升級具有重大戰略意義。
1 四輪獨立電機驅動技術介紹
傳統四輪驅動汽車(圖1),是將發動機產生的動力傳遞給變速器,然后利用分動器把動力分配給前后傳動軸,接著通過傳動軸將動力傳遞給前后差速器,最后傳遞給與各個差速器相連接的半軸,使4個車輪旋轉。傳統四輪驅動汽車的問題是,4個輪的驅動力受與地面摩擦力最小輪的限制,需要設置差速鎖。
四輪獨立電機驅動系統(圖2),是利用4個獨立控制的電機分別驅動汽車的4個車輪,省掉了離合器、變速器及傳動軸等傳動環節,傳動效率更高,整車質量也得到降低,更便于實現機電一體化。另外,由于動力傳動的中間環節減少,傳動系統的振動及噪聲得到改善,甚至可實現無聲行駛。
2 四輪獨立電機驅動技術特點
2.1 更方便的底盤布置,更靈活的供電系統
省去了機械傳動系統之后,四輪獨立電機驅動汽車底盤的布置將更加靈活,使得車內空間更大,底盤的設計也就具有更大的通用性。同時,電動汽車的電源供電系統也更加靈活,無論是采用燃料電池、超級電容或者動力電池,甚至是它們的組合形式,都將更加靈活而不受限制,動力傳動形式也由原來的機械硬連接變為只需要電纜就可進行供電的軟連接形式。
2.2 更好的汽車底盤主動控制性能
傳統汽車的操縱穩定性,主要是通過控制發動機和制動系統來實現對車身動態特性的調節,但發動機和制動系統電磁閥的控制存在延時性,控制會存在一定的滯后。最近,也開發出了新的底盤主動控制方法,像超級全輪驅動技術、限滑差速器技術,但是由于需要增加復雜機械和電控系統,使得成本較高,只有在高端轎車中才會采用。
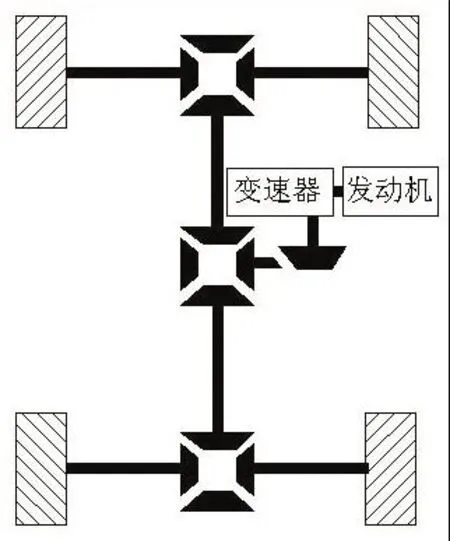
圖1 傳統四輪驅動系統結構圖
在四輪獨立電機驅動形式的電動汽車中,汽車的電動輪是可以獨立控制的,汽車底盤的主動控制通過對驅動電機的控制實現。電機控制響應快、精度高,并且每個驅動輪由各自的控制器控制,可以在不增加額外裝置的情況下,完成底盤主動控制的功能,實現最理想的控制效果。
2.3 最優的驅動力分配
傳統驅動系統中的差速器一般只能實現轉矩的平均分配,所以不具有驅動力的主動分配功能。即使是四驅系統,其前后軸的動力分配也是固定的比例,不能調節。因此,驅動力不能按照汽車的實際工況進行調整。而四輪獨立電機驅動形式的電動汽車,由于驅動輪的驅動力是可以單獨調節的,可以通過分析各輪的轉矩效率,選擇最經濟的驅動方式。同時,四輪獨立電機驅動形式的電動汽車,可以通過電液復合制動技術,實現制動能量的回收,提高能量利用效率,節能環保。
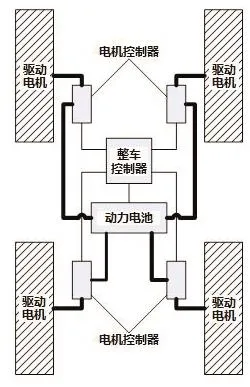
圖2 四輪獨立電機驅動系統結構圖
3 線控電動汽車研究平臺介紹
四輪獨立電機驅動線控電動汽車(圖3),每個車輪都配備輪轂驅動電機和電機驅動控制器。該線控電動汽車取消了傳統汽車的轉向機構、變速器、傳動軸和驅動橋等復雜的機械傳動部件,汽車的機械結構大大簡化[5]。
四輪獨立電機驅動線控電動汽車的整車控制系統,共有5個電子控制單元,分別是整車控制器、左前輪驅動控制器、右前輪驅動控制器、左后輪驅動控制器和右后輪驅動控制器。這5個電控單元之間通過CAN總線網絡架構實現數據通訊,從而實現真正意義的線控。

圖3 四輪獨立電機驅動線控電動汽車的實物圖
4 結束語
當然,四輪獨立電機驅動技術也有其不足之處。第一,如果驅動電機采用輪轂電機,增大了非簧載質量,這會對整車的操控產生一定的不利影響;第二,雖然電子制動可以實現能量回收,但是其制動能力有限,所以仍需要有液壓制動系統,因為沒有了內燃機,需要附加電動真空泵,這也增加了電量的消耗。但是,四輪獨立電機驅動的優勢還是比較明顯的,也被認為是電動汽車的最終驅動形式。因此,高質量的四輪獨立電機驅動產品及其控制系統,已經是國際電氣和汽車工程界研究的重要方向。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
