基于深度神經網絡的空中目標作戰意圖識別
2018-11-30 05:28:28周旺旺姚佩陽張杰勇王勛魏帥
航空學報 2018年11期
周旺旺,姚佩陽,,張杰勇,王勛,魏帥
1. 空軍工程大學 信息與導航學院,西安 710077 2. 中國人民解放軍95910部隊,酒泉 735000
敵方目標作戰意圖識別是目前態勢估計領域研究的熱點,是我方指揮員指揮決策的重要依據。信息化條件下,現代戰場的復雜性、瞬變性劇增,指揮員難以在短時間內處理大量的戰場信息,識別敵方目標作戰意圖,這就迫切需求作戰指揮系統輔助指揮員進行決策,以縮短決策時間,提升決策質量。空中作戰目標是現代戰爭中的典型作戰平臺,是奪取制空權的重要力量。對空中目標作戰意圖及時、準確的識別為我方指揮員防空作戰指揮提供有力支撐。現有的作戰意圖識別研究主要基于模板匹配[1-3]、專家系統[4-6]、貝葉斯網絡[7-9]和神經網絡[10-13]等方法對目標的意圖進行判斷。文獻[1-3]依據領域專家的軍事知識構建模板庫,從敵方目標作戰行動中提取特征,通過推理特征與模板庫的匹配程度確定目標作戰意圖。文獻[4-6]依據領域專家的作戰知識構建知識庫,并用規則的形式表示戰場態勢和作戰意圖的對應關系,最后依據所得戰場態勢用推理機推理作戰意圖。文獻[7-9]依據領域專家知識構建貝葉斯網絡,利用節點表示特征,有向弧表示轉移關系,條件概率表達關系強度,能夠較好地表達特征與意圖之間的關系。上述方法雖在一定程度上解決了目標作戰意圖識別問題,但均需要大量領域專家先驗知識對意圖識別特征權重、先驗概率等進行量化,而由于戰場環境復雜性的不斷增強,新作戰平臺和作戰樣式的不斷涌現,領域專家較難在短時間掌握目標的全面信息,其先驗知識不足以對目標屬性與作戰意圖間的關系進行精確量化。針對以上問題,文獻[10-12]利用神經網絡自適應和自學習的能力,自動從訓練特征數據中提取識別規則,并將識別規則記憶在網絡權值中以便后期意圖預測。這些基于神經網絡的方法可以在領域專家先驗知識不足情況下較好地解決目標意圖識別問題,但由于隱藏層數較淺,難以表達復雜度高的問題。文獻[13]提出了一種基于棧式自編碼器的意圖識別深度學習模型,將戰場環境信息、目標屬性和目標實時狀態信息作為輸入,識別作戰意圖。該方法能有效識別目標作戰意圖,但模型輸入包含多個時刻目標狀態信息,在模型訓練時會產生累積誤差,影響識別效果。上述方法均采用基本的反向傳播(Back Propagation, BP)算法對網絡進行訓練,收斂速度較慢,且容易陷入局部最優。
本文針對領域專家知識不足條件下,難以量化屬性特征與作戰意圖間的映射關系問題,提出了一種采用深度神經網絡對空中目標進行意圖識別的方法,通過將空中作戰目標的機動類型、速度、高度、位置等屬性特征與對應的意圖標簽作為樣本輸入到深度神經網絡模型中,調整網絡節點權值,然后用訓練好的模型預測目標的作戰意圖。深度神經網絡是多隱藏層的神經網絡,由于隱藏層數較深,后面層網絡可以在前面層網絡學習到的初步特征基礎上形成更高級別的特征[14],因此能夠對目標意圖進行更好的識別。目標狀態的改變是由于發生了機動,以目標機動類型作為模型輸入,既能降低樣本維數,減少累積誤差,又能保留目標運動信息。本文采用ReLU(Rectified Linear Unit)函數[15]作為激活函數解決梯度消失問題,同時結合自適應矩估計(Adaptive moment estimation,Adam)[16]優化算法加速模型收斂,跳出局部最優,可以得到更好的訓練模型。采用深度神經網絡方法可以更好地解決領域專家知識不足條件下的目標意圖識別問題。
1 作戰意圖特征選取
本文研究的是空中目標的作戰意圖識別過程。敵方的作戰意圖由所配置的兵力合力實現,敵方兵力會按一定的規則采取作戰行動去實現其作戰意圖,敵方作戰行動表現為目標自身狀態的改變。因此我方通過對其狀態的觀測識別其行動,進一步識別其作戰意圖,意圖層次表示及推理過程如圖1所示。
圖1 意圖的層次表示及推理過程Fig.1 Hierarchical representation and reasoning process of intention
目標作戰意圖的不同會表現為某些狀態的區別,意圖與狀態間存在某些特定關系。本文依據領域專家知識選取了與目標作戰意圖關系緊密的特征,如飛行速度、高度、航向角、方位角、距離、飛行加速度、雷達反射面積、對空雷達狀態、對海雷達狀態、干擾狀態、敵我識別應答和機動類型共12維特征。作戰意圖分為突防、攻擊、電子干擾、運輸、加油、民航飛行、預警探測和偵察等8類。本文列舉了目標飛行速度、高度、雷達狀態等3種特征與作戰意圖間的對應關系:
1) 目標飛行速度與作戰意圖
殲擊機在空戰格斗時通常采用大速度接敵,飛行速度一般為735~1 470 km/h;轟炸機和運輸機飛行速度一般為600~850 km/h;運輸機通常采用巡航速度執行運輸任務,巡航速度一般小于其最大飛行速度;預警機飛行速度為750~950 km/h。
2) 目標飛行高度與作戰意圖
突防一般分為低空突防和高空突防,對應高度分別為50~200 m和10 000~11 000 m;空戰格斗一般在1 000~6 000 m高空進行;為躲避雷達探測,偵察機一般采用低空和超高空偵察,對應高度為100~1 000 m和15 000 m以上。表1為目標高度與目標作戰意圖對應關系。
3) 目標雷達狀態與作戰意圖
民航飛機一般不裝備對空和對海雷達;轟炸機一般裝備兩款雷達,但只在轟炸攻擊時保持對空或對海雷達開機;執行偵察任務的飛機一般保持兩款雷達同時開機;空戰格斗時對空雷達通常開機;執行運輸任務時雷達一般靜默。
目標作戰意圖的顯現是一個動態的時序過程,僅依賴某一時刻目標的狀態預測其作戰意圖可能導致預測結果的片面性,本文將連續10個雷達取樣點的目標狀態進行封裝,識別其機動類型。將得到的目標機動類型及最后時刻目標飛行速度、高度、航向角、方位角、距離、飛行加速度作為目標機動特征。由于目標狀態的連續性,以最后時刻目標狀態及目標機動類型作為模型輸入即可保留較為完備的目標運動信息。表2為目標機動類型與目標作戰意圖之間的關系,表中未列出直飛、左轉彎、右轉彎3種所有作戰意圖都適用的機動類型。
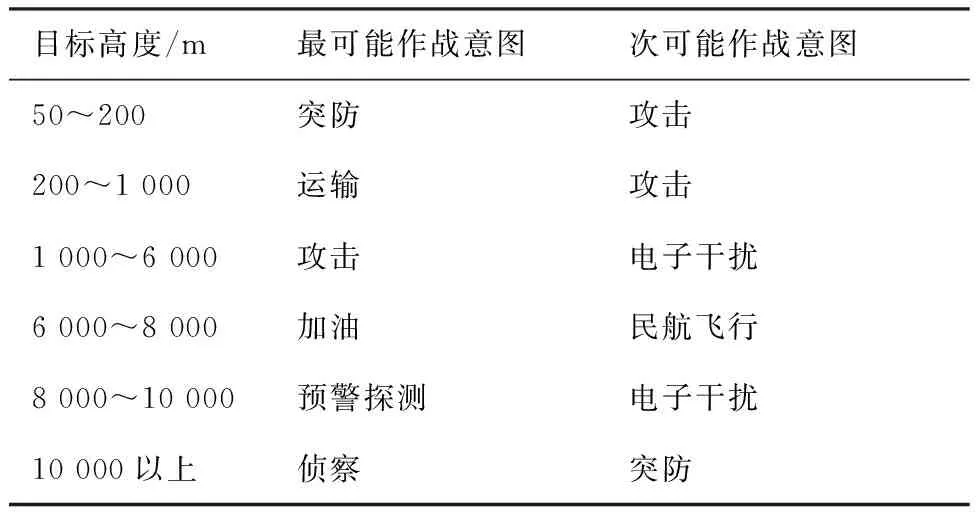
表1 目標高度與目標作戰意圖的關系
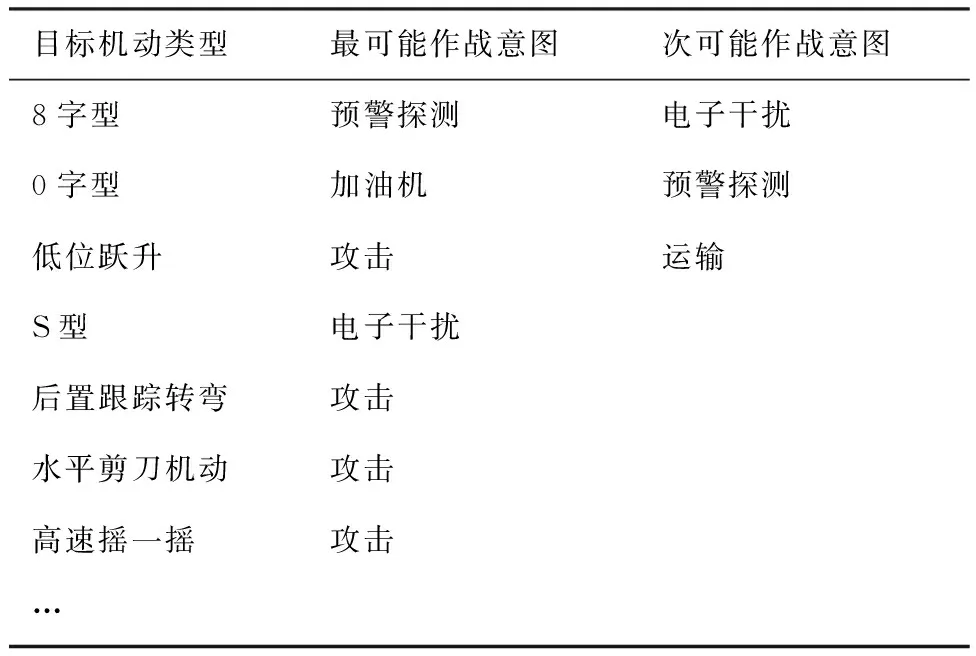
表2 目標機動類型與目標作戰意圖的關系
2 樣本數據處理
神經網絡模型只能處理數值數據,雷達等傳感器獲取的目標飛行速度、高度、航向角、方位角、距離、飛行加速度、雷達反射面積等機動數據為數值數據,但不同類別數據間量級差別較大;電子偵查設備獲取的目標對空雷達狀態、對海雷達狀態、干擾狀態、敵我識別應答結果及意圖類型、機動類型均為分類數據。為滿足模型對數據的要求,消除量綱影響,需對樣本數據和意圖標簽進行處理。
2.1 歸一化處理

(1)
式中:minAx為第x種屬性Ax的最小值;maxAx為屬性Ax的最大值。
2.2 數值化處理

(2)
生成作戰意圖標簽的方法主要有以下2種:① 由前線作戰人員反饋其觀測到的敵方目標作戰意圖,后方人員依據反饋結果確定樣本數據對應的意圖標簽;② 由領域專家通過對目標實現其作戰意圖過程的持續跟蹤觀察確定敵方目標作戰意圖。隨著戰場環境復雜性的不斷增強,新作戰平臺和作戰樣式的不斷涌現,領域專家較難在短時間掌握目標的全面信息,導致其先驗知識不足以根據目標的機動和狀態數據直接推斷目標作戰意圖,但其能夠通過對目標實現作戰意圖過程的持續跟蹤觀測,對目標作戰意圖定性,得到樣本數據對應的作戰意圖標簽。如當敵我雙方正進行空戰格斗時,領域專家能夠依據獲取的敵方目標空戰過程的視頻、圖像等信息確定敵方目標作戰意圖為攻擊。意圖識別結果為分類數據,同樣需對其進行數值化處理,作戰意圖與模型輸出對應關系如圖2所示。

圖2 作戰意圖與模型輸出的對應關系Fig.2 Correspondence between combat intention and model output
3 作戰意圖識別模型構建
神經網絡可以在無先驗知識條件下,僅通過網絡自身的訓練,自動學習輸入與輸出之間的映射關系。因此,在領域專家先驗知識不足的條件下,通過獲取到的敵方目標數據和意圖標簽對神經網絡進行訓練,得到作戰意圖識別神經網絡,然后用訓練好的網絡對目標意圖進行識別。
對于多隱藏層的神經網絡,后面層網絡可以在前面層網絡學習到的初步特征基礎上形成更高級別的特征[14],因此可以更好地刻畫數據特征,同時,相對于單隱藏層、多節點的神經網絡可以用較少的參數表征相同復雜度的函數。基本的BP神經網絡隨著網絡復雜度的提高,其越容易陷入局部極值,導致網絡無法得到很好的訓練。深度學習是機器學習中的一個分支,其目標是建立能夠模擬人腦進行分析、學習的神經網絡,現已廣泛應用于圖像識別[17-18]、語音識別[19-20]、行為識別[21-22]等領域。本文基于深度神經網絡模型對目標作戰意圖識別問題進行研究。
3.1 ReLU激活函數

激活函數ReLU的表達式為σ(z)=max(0,z),即當z≥0時保持不變;當z<0時為0,其求導簡單;當z≥0時,導數為1;當z<0時,導數為0。因此不會隨著遞推的進行發生梯度衰減,可以解決部分梯度消失問題。
3.2 基于Adam算法的模型訓練過程
傳統的梯度下降方法的學習率η保持不變,且隨著損失函數復雜度的提高,越容易陷入“鞍點”,即所有方向上梯度值為零。而Adam算法結合了Momentum優化算法和RMSprop(Root Mean Square prop)優化算法的優點,當梯度在連續朝同一個方向更新時會增大權重變化量,當梯度更新方向變化時會減小權重變化量,如同石頭下落過程中的慣性一樣,利用這個“慣性”,避免網絡訓練時陷入局部最優點,加速網絡收斂。同時,Adam算法可以讓參數自適應地更新學習率,更新頻率高的參數學習率較小,更新頻率低的參數學習率較大,可以提高梯度優化算法的魯棒性。
(3)
式中:gt為對于參數θ在迭代次數t時目標函數的梯度;參數θ指代網絡中所有參數。
(4)
式中:mt為梯度的一階力矩;vt為梯度的二階力矩。通過計算偏差修正一階和二階力矩估計來減少偏差
(5)
式中:β1、β2為超參數,用于修正一階和二階力矩估計。
Adam算法的參數更新公式為
(6)
式中:ε為平滑項,防止被零除。
4 目標作戰意圖識別流程
基于深度神經網絡模型對目標作戰意圖進行識別,步驟為:
步驟1從各類傳感器中提取目標特征數據,并根據實際作戰結果和領域專家判斷對其標記意圖標簽。利用獲取的目標特征數據和意圖標簽構建數據庫,將數據庫中數據抽取一部分作為測試數據庫,其他部分作為訓練數據庫,從訓練數據庫中隨機抽取部分數據作為驗證數據庫。
步驟2調整網絡結構,確定隱藏層數和節點數。
步驟3將訓練數據庫中所有數據輸入到構建好的深度神經網絡中,調整網絡權值,將輸出的意圖識別結果與標簽對比,計算識別精度,若識別精度達到模型既定標準則轉步驟4,否則轉步驟2。
步驟4將驗證數據庫中的數據輸入到訓練好的深度神經網絡中,計算識別精度,若識別精度達到模型既定標準則轉步驟5,否則轉步驟2。
步驟5將測試數據庫中的目標特征數據輸入到訓練好的深度神經網絡中,計算識別精度,判定模型識別效果。
步驟6將待識別作戰意圖的目標特征數據輸入模型,預測出其作戰意圖。
5 仿真實驗分析
實驗采用作戰意圖數據集Data,數據集Data為不同空中目標作戰意圖對應特征狀態量測值,包含飛行速度、高度、航向角、方位角、距離、飛行加速度、雷達反射面積、對空雷達狀態、對海雷達狀態、干擾狀態、敵我識別應答和機動動作共12維特征數據,分為8種作戰意圖,數據占比情況為突防13.6%、攻擊22.7%、電子干擾9.1%、運輸13.6%、加油4.5%、民航飛行13.6%、預警探測9.1%、偵察13.6%,樣本規模為8 000。分別隨機抽取90%數據構成訓練數據庫,剩余10%構成測試數據庫。實驗迭代步長均為10 000,神經網絡學習率η=0.01,超參數β1=0.9,β2=0.999,平滑項ε=10-8。
5.1 模型結構確定實驗
不同網絡結構的深度神經網絡識別效果不同,因此需確定深度神經網絡模型隱藏層層數和節點數。模型輸入層、輸出層節點數分別設定為數據維數和分類數。雖然模型效果是由測試數據來評判的,但在實驗中不能利用測試數據來調整模型結構。使用測試數據來調整網絡結構可能會導致模型過擬合,失去對未知數據的判別能力。本文從訓練數據庫中隨機抽取10%建立驗證數據庫,用驗證數據庫評判模型的效果,調整模型結構。圖3為Data數據集在不同網絡結構下識別效果對比圖,識別率均為數據集整體識別率。
由圖3可知,驗證數據集與測試數據集的曲線趨勢基本一致,因此可以用驗證數據集來判斷模型的好壞,調整模型結構。由圖3(c)可見,隱藏層數為4層,節點數依次為10、20、20、10時模型識別準確度較高,確定其為深度神經網絡模型的結構。
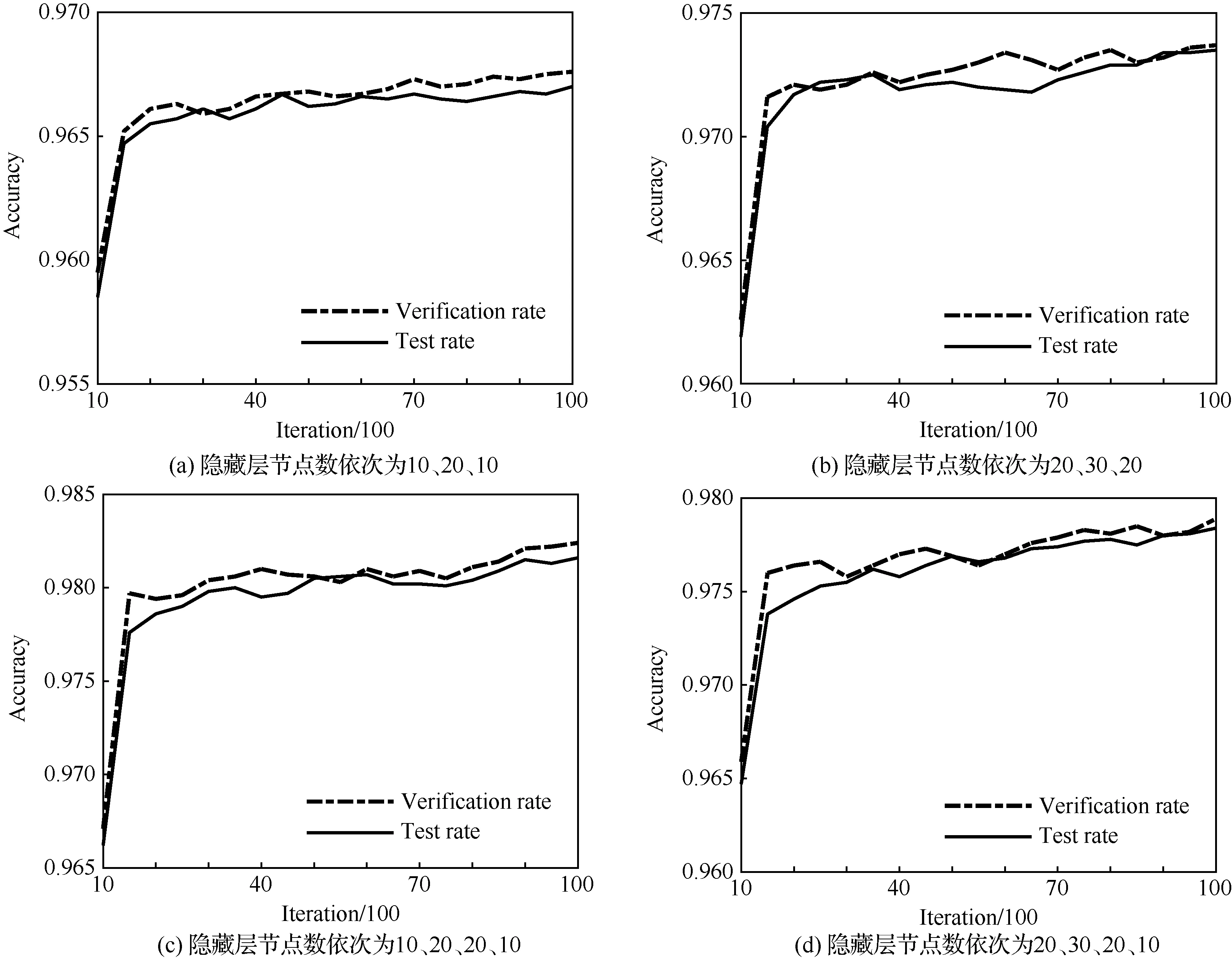
圖3 4種不同網絡結構下驗證數據庫和測試數據庫的識別率對比Fig.3 Comparison of recognition rate of verification database and test database under four different network structures
5.2 模型可靠性驗證實驗
為驗證所提模型的可靠性,分8次從數據庫中抽取90%的數據構成訓練樣本,剩余10%的數據構成測試樣本,將訓練樣本輸入到模型調整節點參數,用測試樣本判斷模型識別效果。圖4為
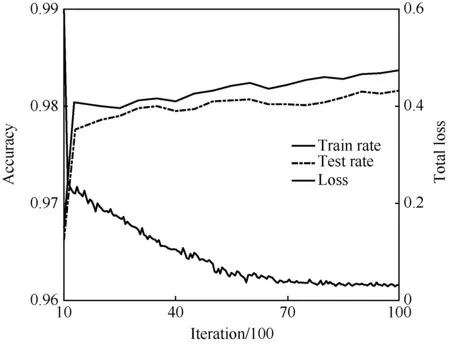
圖4 訓練識別率、測試識別率和損失值變化曲線Fig.4 Curves of training recognition rate, test recognition rate and loss value
不同迭代次數下模型的識別效果圖,表3為8個不同數據庫下模型識別效果對比。
通過8次相同規模、不同訓練樣本的識別結果可以看出,深度神經網絡模型在不同訓練樣本條件下可以有效地識別空中目標作戰意圖,平均識別率達0.981 7,驗證了所提模型的可靠性。

表3 不同數據庫模型識別效果對比
5.3 模型準確性驗證實驗
為驗證所提模型的準確性,實驗中對比基于單層BP神經網絡模型、深度BP (Deep BP, DBP)神經網絡模型和Adam+Sigmiod深度神經網絡模型、文獻[13]所提棧式自編碼器(Stacked Auto-Ecoder, SAE)模型和Adam+RuLU深度神經網絡模型的識別效果,如圖5和圖6所示。
由圖5和圖6可知,Adam+RuLU深度神經網絡模型在Data數據集上能得到更好的識別效果。對比圖5所示的5種模型對空中目標作戰意圖識別準確率變化曲線可以看出,SAE模型收斂速度更快,在迭代1 200次左右即收斂,但Adam+RuLU深度神經網絡模型較其他4種模型識別準確率更高。
圖5 5種模型識別效果對比圖Fig.5 Comparison of recognition effects of five models
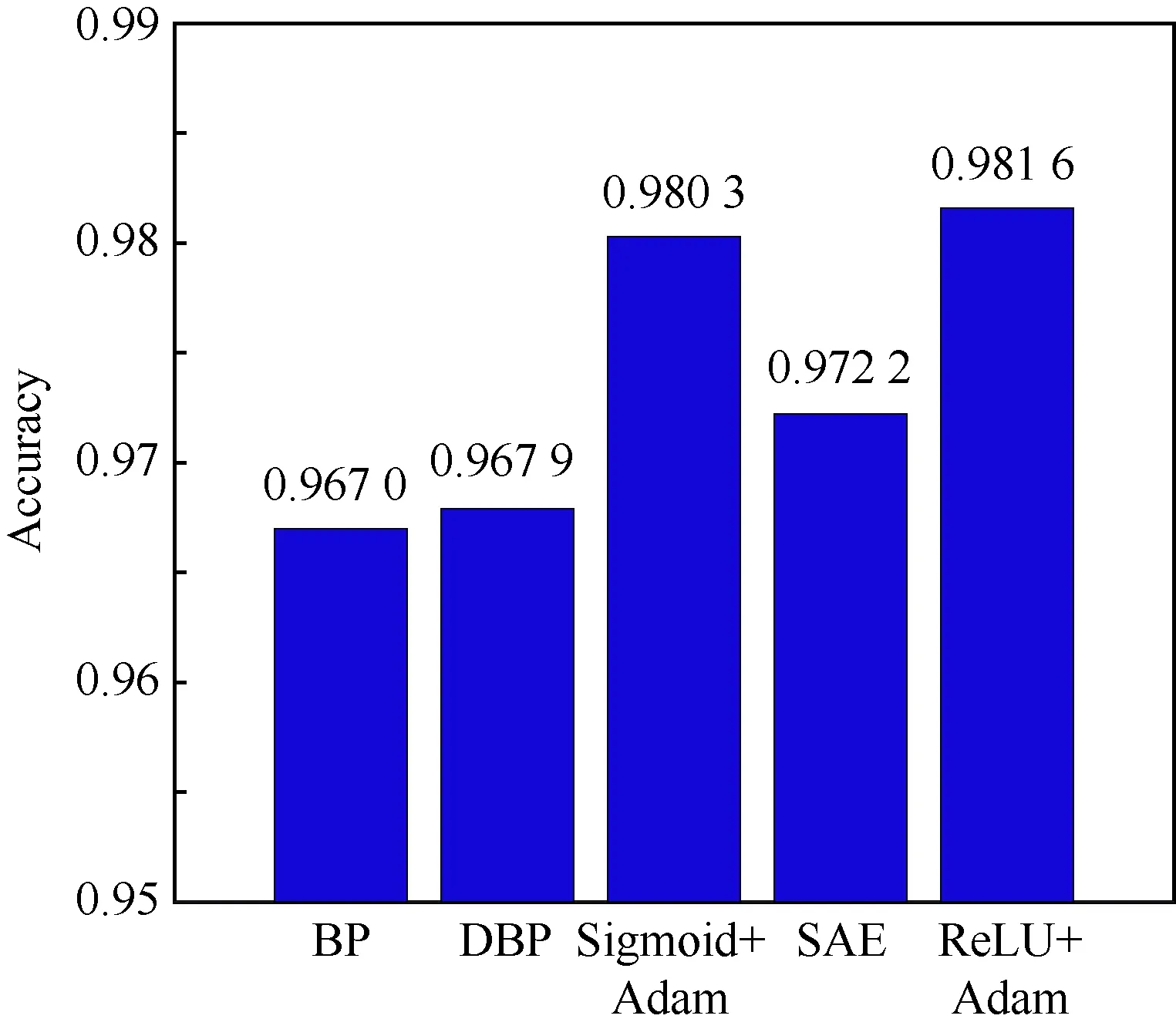
圖6 不同模型識別效果對比Fig.6 Comparison of recognition effects of different models
6 結 論
1) 本文分析了作戰意圖識別問題特點,采用監督學習的方法解決領域專家知識不足條件下的作戰意圖識別問題。
2) 設計了一種基于深度神經網絡的空中目標作戰意圖識別模型,利用ReLU函數和Adam算法優化模型,提高了模型識別效果。
3) 深度神經網絡模型能夠對空中目標作戰意圖進行識別,有著良好的可靠性和準確性;對比實驗結果顯示,該模型收斂速度更快且識別效果更好。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
財經(2017年2期)2017-03-10 14:35:35
財經(2016年15期)2016-06-03 07:38:02
財經(2016年3期)2016-03-07 07:44:46
