基于改進(jìn)布谷鳥搜索的Benchmark框架損傷識(shí)別
2018-11-30 00:51:24黃民水乾超越程紹熙盧海林
振動(dòng)與沖擊 2018年22期
關(guān)鍵詞:模型
黃民水, 乾超越, 程紹熙, 盧海林
(武漢工程大學(xué) 土木工程與建筑學(xué)院, 武漢 430073)
群智能算法是一種新興的演化計(jì)算技術(shù),已成為越來(lái)越多研究者的關(guān)注焦點(diǎn),它與人工生命,特別是進(jìn)化策略以及遺傳算法有著極為特殊的聯(lián)系。群智能算法,不僅在函數(shù)優(yōu)化問(wèn)題上應(yīng)用廣泛,在結(jié)構(gòu)的損傷識(shí)別領(lǐng)域也備受青睞。王延偉等[1]介紹了群智能算法在結(jié)構(gòu)損傷識(shí)別中的應(yīng)用。劉仁云等[2]提出了灰色多粒子群協(xié)同的多目標(biāo)優(yōu)化算法,并應(yīng)用于結(jié)構(gòu)的損傷識(shí)別,結(jié)果表明,該方法能夠有效的處理結(jié)構(gòu)損傷識(shí)別問(wèn)題。丁政豪等[3]利用改進(jìn)的蜂群算法對(duì)耦合雙梁進(jìn)行了損傷識(shí)別,結(jié)果表明,改進(jìn)的蜂群算法較原算法能有效地識(shí)別出局部損傷,并且抗噪聲能力更強(qiáng)。
布谷鳥搜索[4]是受布谷鳥在某一區(qū)域內(nèi)搜索宿主鳥窩產(chǎn)卵行為啟發(fā)編寫的群智能算法。此算法參數(shù)設(shè)置簡(jiǎn)單,計(jì)算速度快,但該算法存在收斂精度不高、收斂速度不夠快等問(wèn)題[5]。本文采用自適應(yīng)發(fā)現(xiàn)策略和自適應(yīng)步長(zhǎng)對(duì)算法進(jìn)行改進(jìn),并對(duì)英屬哥倫比亞大學(xué)實(shí)驗(yàn)室ASCE Benchmark框架模型進(jìn)行損傷識(shí)別。識(shí)別結(jié)果表明,改進(jìn)后的算法在結(jié)構(gòu)損傷識(shí)別方面,具有更高效、更準(zhǔn)確的識(shí)別能力,對(duì)于實(shí)際工程的損傷識(shí)別具有一定的指導(dǎo)性意義。
1 布谷鳥搜素
1.1 基本布谷鳥搜索(CS)
布谷鳥搜索是將鳥巢中的蛋作為解,每個(gè)巢中有一個(gè)蛋,代表了一種新的解,其目的是用產(chǎn)生的新的、更好的解來(lái)取代較差的解。該算法基于3個(gè)理想化的規(guī)則:①每只布谷鳥下一個(gè)蛋,隨機(jī)選擇放在一個(gè)巢中;②最高品質(zhì)的鳥巢將保留到下一代;③鳥巢的總數(shù)不變,布谷鳥的蛋被宿主踢出鳥巢的發(fā)現(xiàn)概率為pa=0.25。
基于上述3個(gè)規(guī)則,布谷鳥孵化方式如下;
xk+1,i=xk,i+α?Levy(λ)
(1)
式中:xk,i表示第k代第i個(gè)鳥窩的位置,?為點(diǎn)乘,α為算法決定步長(zhǎng)向量,Levy(λ)為飛行路徑,采用丟棄概率淘汰部分解后,采用公式(2)生成相同數(shù)目的新解:
xk+1,j=xk,i+λ(xk,i-xk,e)
(2)
式中:γ是服從(0,1)均勻分布的隨機(jī)數(shù);xk,i和xk,e第k代的兩個(gè)隨機(jī)解。
1.2 改進(jìn)布谷鳥搜索(ICS)
1.2.1 自適應(yīng)發(fā)現(xiàn)概率
布谷鳥搜索在全局搜索方面具有較好的能力,但是如果發(fā)現(xiàn)概率pa=0.25固定不變[6-7],易導(dǎo)致后期收斂時(shí),大部分解會(huì)變異;若將其變小,會(huì)使前期較差解收斂較慢。文中發(fā)現(xiàn)概率自適應(yīng)變化,實(shí)現(xiàn)了算法的全局收斂和局部收斂的平衡。
(3)
式中:f為當(dāng)前解的適應(yīng)度值;favg為所有解的適應(yīng)度值平均值;f1是種群中f
1.2.2 自適應(yīng)步長(zhǎng)
布谷鳥搜索根據(jù)隨機(jī)游走策略調(diào)整步長(zhǎng),大小隨機(jī)變化[8-9],步長(zhǎng)較大時(shí),全局搜索能力增強(qiáng),收斂精度降低;步長(zhǎng)較小時(shí),收斂精度會(huì)提高,但全局搜索能力較弱。文中,步長(zhǎng)自適應(yīng)變化,初期取較大步長(zhǎng)以提高全局搜索能力;后期取較小步長(zhǎng)來(lái)提高精度。步長(zhǎng)控制向量的分量α0可表示為:
(4)
式中:i表示當(dāng)前迭代次數(shù);N表示總迭代次數(shù),本文設(shè)置指數(shù)t=3.5,步長(zhǎng)控制向量的分量最大值為αmax=3,步長(zhǎng)控制向量的分量最小值為αmin=0.01。
2 損傷識(shí)別因子
2.1 頻率因子
結(jié)構(gòu)動(dòng)力學(xué)中,如忽略阻尼影響,自由度體系特征方程可表示為:
([K]-ω2[M])[φ]=0
(5)
式中:[M]為整體質(zhì)量矩陣,[K]為整體剛度矩陣,ω為自振頻率,[φ]為振型向量。
頻率因子是指理論頻率和試驗(yàn)頻率之間的差值或差值和試驗(yàn)頻率的比值,表示為[10]:
(6)
式中:N表示提取的頻率階數(shù);fai和fei則分別是第i階理論頻率值和試驗(yàn)頻率值。
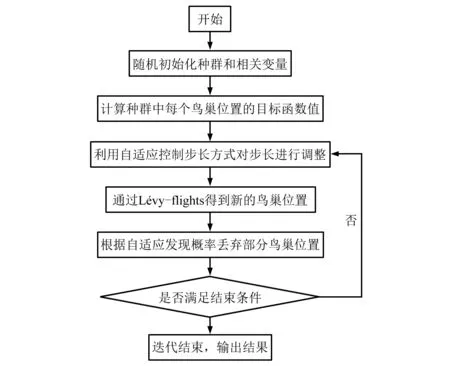
圖1 改進(jìn)布谷鳥搜索(ICS)流程圖Fig.1 Flow chart of improved cuckoo search (ICS)
2.2 振型因子
基于模態(tài)置信度建立的振型因子表示為[11]:
(7)
式中:N表示振型總階數(shù),MAC為模態(tài)置信度。
(8)
式中:φai為理論振型;φei為試驗(yàn)振型。
2.3 綜合因子
采用頻率因子和振型因子構(gòu)成一個(gè)綜合因子時(shí),每個(gè)因子要賦予不同的權(quán)重系數(shù),在前期研究的基礎(chǔ)上,根據(jù)文獻(xiàn)[12]取a=10、b=1。
R=a·Rf+b·Rs
(9)
3 ASCE Benchmark框架模型
3.1 模型參數(shù)介紹
ASCE Benchmark框架模型位于加拿大英屬哥倫比亞大學(xué)(University of British Columbia)的地震工程研究實(shí)驗(yàn)室。該結(jié)構(gòu)為一個(gè)4層、2跨×2跨的鋼結(jié)構(gòu)框架,其截面性質(zhì)如表1。

表1 Benchmark框架的構(gòu)件參數(shù)
梁與柱采用鉚釘固接,斜撐與梁柱鉸接。第一、二和三層板的質(zhì)量是800、600和400 kg。結(jié)構(gòu)模型如圖2[13],每層有8個(gè)斜撐,斜撐采用鋼筋。
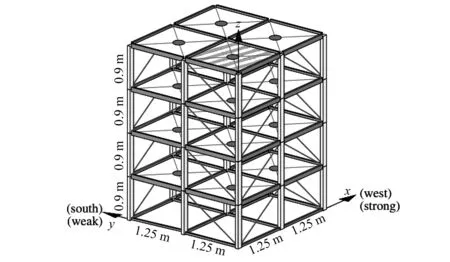
圖2 ASCE Benchmark框架結(jié)構(gòu)模型圖Fig.2 Structural model of ASCE Benchmark frame
3.2 有限元模擬
基于Matlab建立了框架的三維有限元模型,如圖3。框架柱采用3D梁?jiǎn)卧瑔卧?hào)為1-36單元,斜撐采用3D梁?jiǎn)卧瑯前宀捎?D殼單元建模, 共分為84個(gè)單元,其中1-36單元為柱單元,37-68為斜撐單元,69-84為樓板單元。
前8階理論頻率如表2,并與Ansys的理論分析結(jié)果進(jìn)行了對(duì)比。從Ansys與Matlab計(jì)算頻率識(shí)別結(jié)果來(lái)看,最大誤差為-0.18%,證明了ASCE Benchmark框架結(jié)構(gòu)的Matlab數(shù)學(xué)建模的正確性,為后續(xù)損傷識(shí)別奠定了基礎(chǔ)。

圖3 ASCE Benchmark框架結(jié)構(gòu)有限元模型Fig.3 Finite element model of ASCE Benchmark frame
在考慮自由度(12-dof或120-dof)、質(zhì)量分布(對(duì)稱或反對(duì)稱)、激勵(lì)類型(環(huán)境激勵(lì)或加載)和數(shù)據(jù)采集(已知或未知輸入)等因素影響的基礎(chǔ)上,Benchmark框架模型研究小組5種模型,每種模型設(shè)置6種損傷工況(圖4):
工況1:拆除第一層所有斜撐;
工況2:拆除第一、三層所有斜撐;
工況3:拆除第一層的38號(hào)單元斜撐;
本文運(yùn)用語(yǔ)料庫(kù)檢索工具對(duì)魯迅小說(shuō)《離婚》的五個(gè)英譯本進(jìn)行了譯文對(duì)比分析。研究發(fā)現(xiàn)五個(gè)譯本都較好地再現(xiàn)了原文的內(nèi)容。五個(gè)譯本中,藍(lán)譯本的譯文詞匯變化性最大,其用詞最豐富;從常用詞匯使用的比較看,王譯本使用的二到四個(gè)字母的常用詞匯最多,也就是說(shuō)他的譯文最通俗易懂;從譯文的平均句長(zhǎng)考察,筆者發(fā)現(xiàn)萊譯本的譯文平均句長(zhǎng)最長(zhǎng),說(shuō)明萊譯本在句子結(jié)構(gòu)是五個(gè)譯本中最復(fù)雜的。這一現(xiàn)象表明,萊譯本在翻譯時(shí)對(duì)一些文化現(xiàn)象進(jìn)行了顯化處理,為的是使讀者更容易理解。當(dāng)然這些異同與譯者的語(yǔ)言習(xí)慣和翻譯風(fēng)格有一定關(guān)系,筆者將另文討論,不在此贅述。
工況4:分別拆除第一、三層的38、55號(hào)單元斜撐;
工況5:在工況4上,松動(dòng)25號(hào)柱頂端螺栓(使該連接處由固接變成鉸接);
工況6:第一層的37號(hào)單元斜撐截面面積減小1/3。
3.3 振動(dòng)試驗(yàn)
實(shí)驗(yàn)過(guò)程中,結(jié)構(gòu)每層布置四個(gè)傳感器,位于每層四邊中間節(jié)點(diǎn),采集了x、y方向的加速度數(shù)據(jù),采樣頻率為1 000 Hz,采樣時(shí)間為40 s。采用Origin軟件對(duì)加速度時(shí)程數(shù)據(jù)進(jìn)行傅里葉變換,得到各工況頻率如表3,振型歸一化后如圖5和圖6。

表2 ASCE Benchmark框架結(jié)構(gòu)理論頻率

表3 x, y方向前8階頻率
4 損傷識(shí)別
基于基本布谷鳥搜索(CS)與改進(jìn)布谷鳥搜索(ICS)進(jìn)行了不同工況的損傷識(shí)別,損傷識(shí)別結(jié)果如圖7。由于實(shí)驗(yàn)給出了各工況的描述,損傷單元全為斜撐單元,因此,在本文識(shí)別結(jié)果圖中,沒(méi)有給出柱單元 (1-36號(hào))和板單元(69-84號(hào))的識(shí)別結(jié)果,只給出了斜撐單元(37-68號(hào))的識(shí)別結(jié)果。

圖4 ASCE Benchmark框架結(jié)構(gòu)6種損傷工況Fig.4 Six damage cases of ASCE Benchmark frame
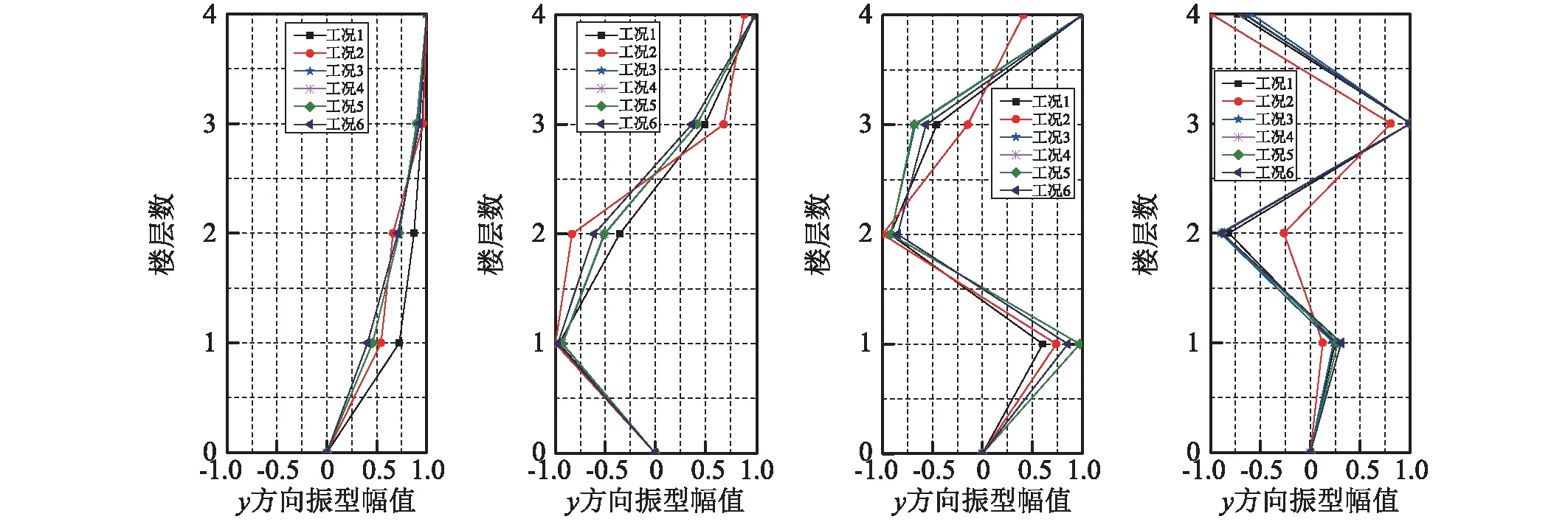
圖5 方向前4階振型Fig.5 The first four mode shapes in y direction
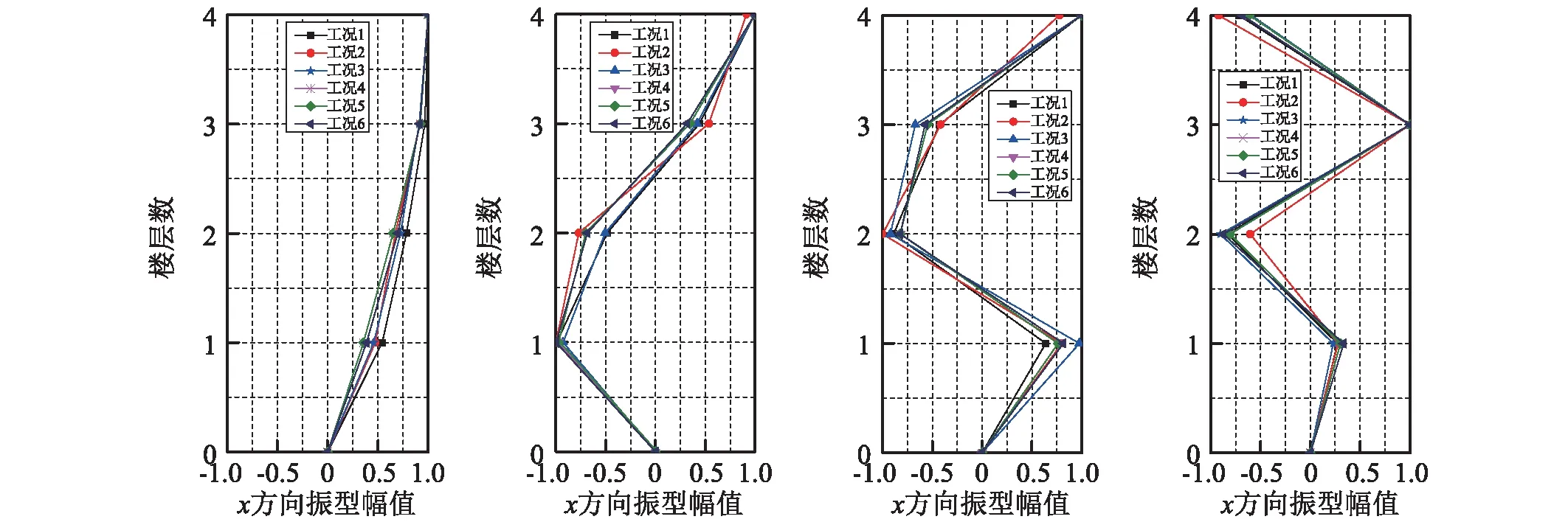
圖6 方向前4階振型Fig.6 The first four mode shapes in x direction

圖7 不同工況損傷識(shí)別結(jié)果Fig.7 Damage identification results of different cases
由識(shí)別結(jié)果可知:
(1) 對(duì)于工況1,ICS能十分準(zhǔn)確識(shí)別出37-44號(hào)單元的損傷程度,CS識(shí)別結(jié)果存在一定的誤差,最大識(shí)別誤差為8.2%。
(3) 對(duì)于工況3,ICS識(shí)別出了第一層38號(hào)單元拆除,CS識(shí)別出了37號(hào)和41號(hào)單元存在損傷,損傷程度為72.3%和19.7%。實(shí)驗(yàn)過(guò)程中拆除的是第一層中的38號(hào)單元,ICS算法能夠正確識(shí)別出拆除單元,而CS識(shí)別結(jié)果存在誤判。
(4) 對(duì)于工況4,該工況拆除的第一層的38號(hào)和第三層的55號(hào)單元,ICS和CS識(shí)別出弱軸平面內(nèi)的37號(hào)單元存在11.6%和13.5%的損傷,38號(hào)單元存在72.9%和67.4%的損傷。對(duì)于第三層拆除的斜撐單元,ICS識(shí)別為55號(hào)單元,損傷程度為75.3%,而CS無(wú)法具體判斷出拆除的單元。可以看出,ICS尋優(yōu)能力優(yōu)于CS。
(5) 工況5是在工況4的基礎(chǔ)上松掉25號(hào)柱頂端的螺栓,從表3中可以看出,工況4和工況5的頻率和振型完全一樣,因此,在進(jìn)行損傷識(shí)別時(shí),與工況4的識(shí)別結(jié)果相似,無(wú)法識(shí)別出松動(dòng)的鉸接點(diǎn);ICS識(shí)別出對(duì)第一層的38號(hào)單元和第三層的55號(hào)單元存在83.0%和71.7%的損傷,而CS無(wú)法確定損傷的單元。
(6)工況6中,將第一層37號(hào)單元截面面積減小1/3,即剛度減小33%,CS識(shí)別出38、45號(hào)單元的損傷程度分別為10.1%、14.5%,兩根斜撐單元均在第一層弱軸平面內(nèi),出現(xiàn)誤判,由此結(jié)果,CS算法不能精確的識(shí)別出損傷的桿件。ICS算法識(shí)別出37、38號(hào)單元損傷程度分別為18.5%、7.8%,38號(hào)單元損傷值明顯小于37號(hào)單元的損傷,由此可以判斷識(shí)別出損傷單元是37號(hào)單元,但損傷值存在一定偏差。CS無(wú)法判斷損傷位置和程度,ICS基本能判斷損傷位置,因此,ICS尋優(yōu)能力優(yōu)于CS。
5 結(jié) 論
(1) 針對(duì)基本布谷鳥搜索收斂精度不高、收斂速度慢的缺點(diǎn),本文根據(jù)布谷鳥搜索的變異過(guò)程,對(duì)主要控制參數(shù)搜索步長(zhǎng)和選擇概率進(jìn)行了改進(jìn),采用自適應(yīng)步長(zhǎng)和自適應(yīng)概率提高了布谷鳥搜索的損傷識(shí)別精度。
(2)基于Matlab建立了Benchmark框架的三維有限元模型,并與Ansys模型的模態(tài)分析結(jié)果進(jìn)行了對(duì)比,最大誤差僅為-0.18%,驗(yàn)證了Matlab分析模型的正確性。
(3) 以Benchmark框架模型為損傷識(shí)別研究對(duì)象,在振動(dòng)試驗(yàn)的基礎(chǔ)上進(jìn)行了6種工況下的損傷識(shí)別,分別采用改進(jìn)布谷鳥搜索和基本布谷鳥搜索進(jìn)行了損傷識(shí)別。結(jié)果表明,改進(jìn)布谷鳥搜索6種工況的尋優(yōu)效果均優(yōu)于基本布谷鳥搜索。本文的方法具有重要工程意義和一定的科學(xué)研究?jī)r(jià)值,可應(yīng)用與工程結(jié)構(gòu)的損傷識(shí)別。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19