利用最小冗余對稱陣列的近場源定位算法
2018-12-07 09:08:12倪萌鈺倪柳柳張佳佳
西安電子科技大學學報 2018年6期
關鍵詞:信號
校 松,陳 輝,倪萌鈺,倪柳柳,張佳佳
(空軍預警學院 重點實驗室,湖北 武漢 430019)
信號源定位問題是陣列信號處理中的一個重要的熱點研究內容,廣泛應用于雷達、聲吶、通信等領域.在遠場情況下入射到陣列的信號為平面波,所以只能對信號源進行測向,而不能定位.在國內外有大量的學者提出了眾多的方法,例如多重信號分類(MUltiple SIgnal Classification, MUSIC)[1]算法、旋轉不變子空間(Estimation of Signal Parameters via Rotational Invariance Techniques, ESPRIT)[2]算法等.當信號源位于近場條件時(即信源與陣列距離處于菲涅爾區域),平面波的假設不再成立,信號以球面波的形式傳播,此時需要對信號的波達方向(Direction Of Arrival,DOA)和距離兩個參數進行估計,從而實現近場源定位.
近10年來,國內外學者對于近場源定位問題進行了大量研究,各種方法相繼提出.最初階段主要集中在等距均勻陣列的研究上[3-8],但為了避免方位和距離模糊,均勻線陣的間距由半波長縮小至 1/4 波長.文獻[3]的MUSIC算法將遠場對角度一維估計的方法變成近場方位和距離二維估計方法,這類算法的精度高、性能穩健,但需要進行多維搜索,運算量非常大.為了克服這個缺點,人們利用等距均勻線陣的對稱特點和高階累積量來重構數據矩陣,從而將二維處理轉化為一維的級聯處理,減少了運算量.如文獻[4]通過構造高階累積量的ESPRIT算法來進行參數估計,文獻[5-6]利用對稱的陣列模型來進行DOA估計,這類算法的缺點是,重構后的虛擬陣列陣元數小于真實陣列,通常能估計的信源數不足陣元數目的一半.文獻[7]構造高階累積量矩陣進行參數估計,減小了孔徑損失.文獻[8]研究了陣元間距大于 1/4 波長時產生的模糊問題.這些算法都受到均勻陣列孔徑的限制,估計精度和空間分辨率不高.
為了突破均勻陣列孔徑的限制,很多學者針對非均勻線陣進行了一些研究[9-14].文獻[9]采用對稱稀疏陣列基于降秩的思想估計方位角,但這種方法會造成一半陣列孔徑的損失.為了避免陣列孔徑的損失,提高陣列的利用率,文獻[10-11]分別采用互素陣列和對稱嵌套陣列,構造高階累積量矩陣對方位進行估計.文獻[12]討論了遠場參數估計的稀疏嵌套陣列模型,大大提高了陣列自由度.文獻[13]研究了近場中非均勻陣列的設計思路.筆者提出了基于最小冗余對稱陣列[14]的協方差矩陣重構算法.該算法通過構造一個只與方位角有關的四階累積量矩陣重構出陣列接收數據協方差矩陣,利用MUSIC算法進行信號DOA的估計;然后在估計出的角度的距離維上進行搜索,得到距離參數,從而實現定位.該算法既擴展了陣列的孔徑,提高了估計性能和空間分辨率,又提高了陣列自由度,可以估計更多的信源數目,且只須進行一維搜索,無需進行參數配對.
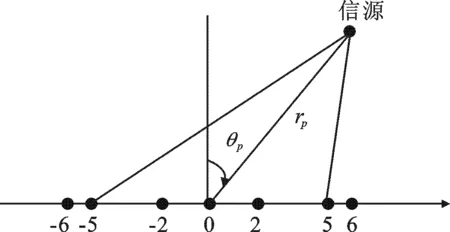
圖1 對稱最小冗余陣列模型
1 近場信號模型
文中采用的陣列模型是最小冗余對稱陣列,陣元數為2M+1,陣元位置以d為單位,陣元的坐標為l-Md,l-M+1d,…,lMd.如圖1所示,以M=3 為例,即是一個7元陣構成的最小冗余對稱陣列.
假設有P個窄帶近場信號,以中心陣元0為參考陣元,則陣元m接收到的信號可表示為
(1)
其中,sp(t)為陣元接收到的第p個信號源,nm(t)是陣元m接收到的噪聲,τpm為第p個信源在陣元m和陣元0之間的時延差,其可表示為
(2)
其中,λ為信源的波長,θp為第p個信源的入射角,rp表示第p個信源與參考陣元之間的距離.式(2)由菲涅爾近似可表示為

(3)
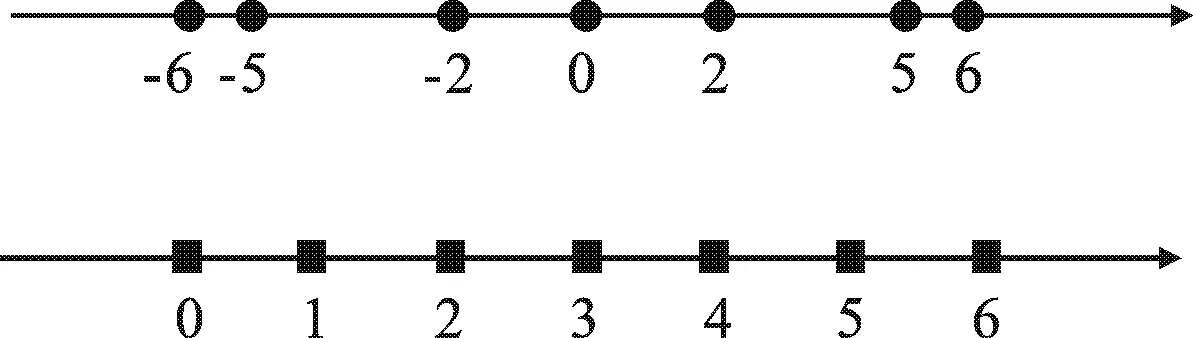
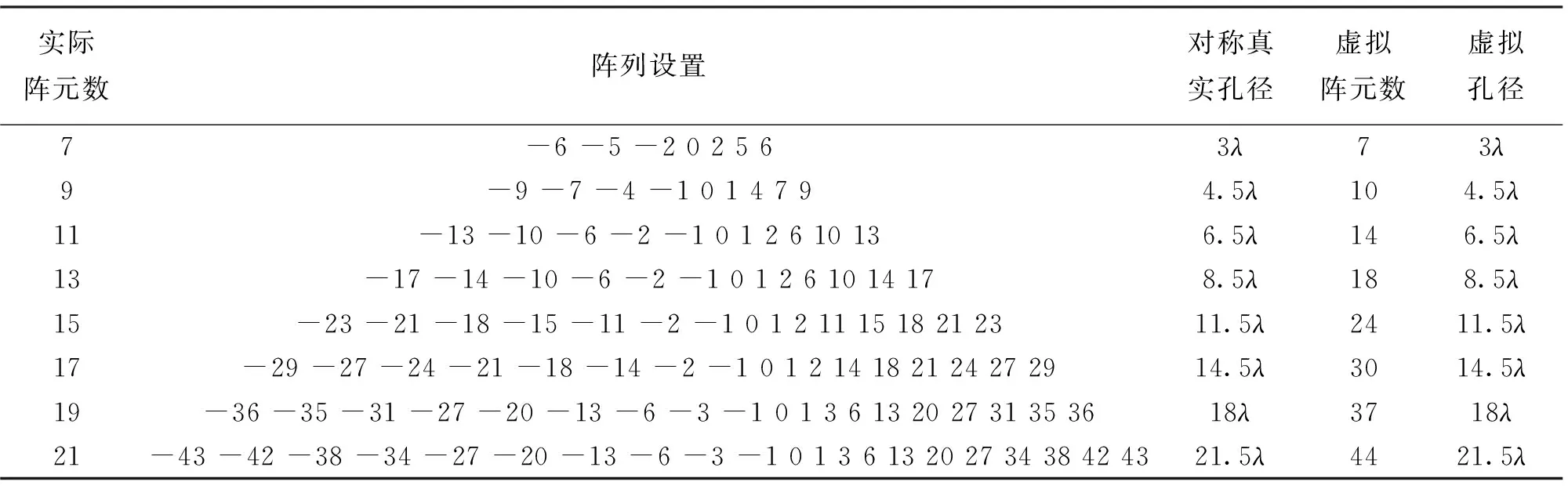
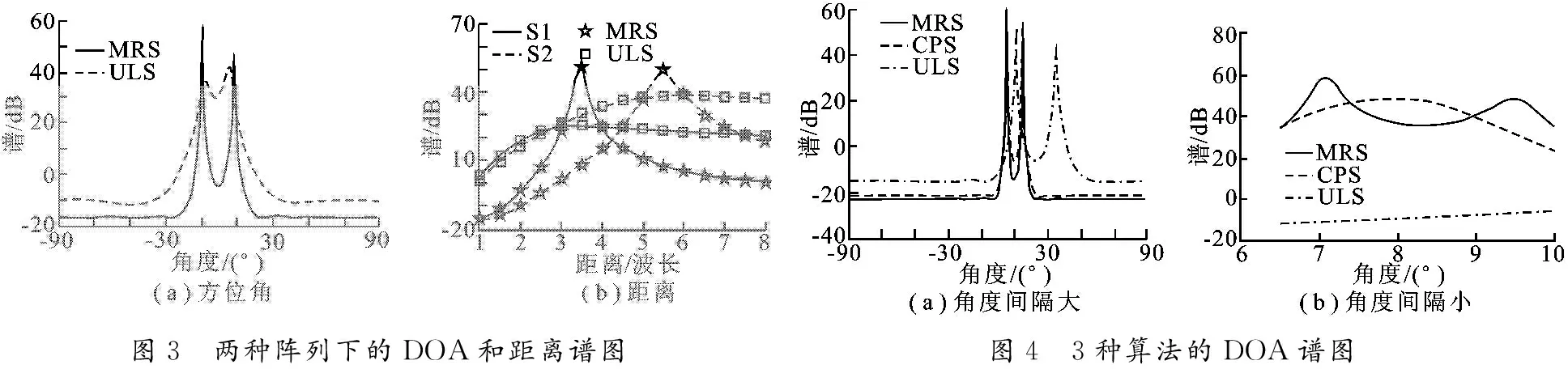
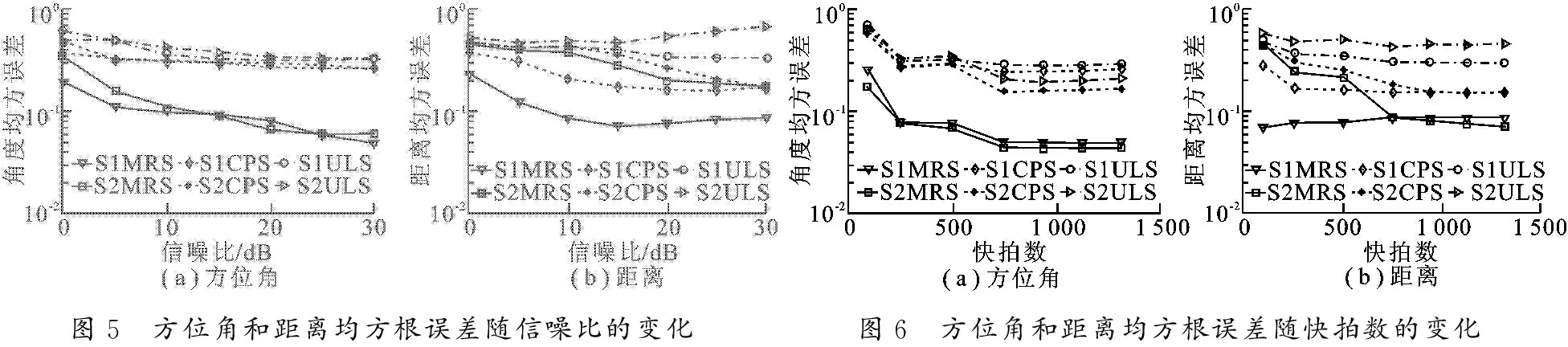
其中,μp=(-2πd/λ) sinθp,φp=[πd2/(λrp)] cos2θp,rp滿足 0.62(D3/λ)1/2 (4) 則陣列接收信號用矩陣形式表示為 不失一般性,進行如下假設: (1) 各信源為零均值、獨立的非高斯窄帶平穩隨機過程,具有非零峰度. (2) 陣元噪聲為零均值的高斯噪聲,各陣元噪聲獨立,且與信源不相關. (3)d=λ/4,λ為信源波長,信源個數P≤2M. 根據對稱陣列和高階累積量的性質,構建只與信源方位角有關的四階累積量: (11) 其中,m,n∈[0,M],xm為第m個陣元的接收數據.由高階累積量的性質可以簡單推導得到 (14) z=[Rx(-6),Rx(-5),…,Rx(0),…,Rx(5),Rx(6)]T. (15) 根據列向量z構造7×7維Toeplitz矩陣Z,可表示為 (16) 在高斯噪聲的假設下,矩陣Z為重構的陣列接收數據的協方差矩陣,其可表示為 根據式(17)~式(20)得到,矩陣Z等效于遠場虛擬陣元數為7的等距均勻線陣(間距為λ/2) 所接收到的陣列協方差矩陣,對其進行特征分解得到: (21) 其中,US是由P個大特征值對應的特征矢量張成的信號子空間,ΣS是P個大特征值組成的對角矩陣,UN是由 7-P個小特征值對應的特征矢量張成的噪聲子空間,ΣN是 7-P個小特征值組成的對角矩陣.根據MUSIC算法的譜可以得到信源方位角的估計值: (22) 圖2 實際陣列與虛擬陣列 圖2為實際陣列與虛擬均勻線陣陣列結構圖,其中“●”代表實際對稱最優最小冗余陣列,“■”為等效的虛擬均勻線陣. 由上述過程可知,利用以d=λ/4為單位的最小冗余對稱陣列模型來構建高階累積量矩陣,其可以等效為陣元數目更多的間距為半波長的虛擬等距均勻線陣.該陣列模型相比于同陣元數的均勻線陣,擴展了陣列的孔徑,增加了陣列的自由度,可以估計更多的信源角度,且不會產生模糊. R=E[X(t)X(t)H] , (23) (24) 上述估計方法只需對譜函數進行P次一維搜索就得到信源距離的估計值,避免二維搜索,無須參數配對,減少了計算量,僅需P+1 次搜索就可得到信源的角度與距離參數,實現定位. 由文獻[14]可知,最優的最小冗余陣列其陣元數為4,即最優的最小冗余對稱陣列陣元數為7,當陣元數大于7時,則采用非最優最小冗余陣列模型進行估計(除了零之外,其余位置也可以有冗余性).表1給出了部分不同陣元數的非最優最小冗余對稱陣列所能等效均勻線陣的虛擬陣元數目和孔徑. 表1 不同陣元數的非最優最小冗余對稱陣列 可以看出,當實際冗余對稱陣列模型陣元數大于7時,其等效的均勻線陣虛擬陣元數大于實際陣元數,并且隨著實際陣元數的增大,所等效的數目也越來越多,陣列自由度也隨之增大.由于在距離估計中利用實際陣列接收數據協方差矩陣,因此當實際陣元數為Q(Q≥7) 時,文中最小冗余對稱協方差矩陣重構(Minimum Redundant Symmetric covariance matrix reconstruction,MRS)算法可估計Q-1 個信源,而文獻[5,9]算法只能達到MRS算法估計信源數的一半. 當陣元數相同時,以實際陣元數11為例,表2給出了MRS算法與等距均勻陣列(Uniform Linear Symmetric,ULS)以及文獻[10]基于互素陣列(Co-Prime Symmetric,CPS)算法的陣列孔徑比較.可以看到,MRS算法相比ULS算法和CPS算法,可等效更多的虛擬陣元數,擴展了陣列孔徑,并且隨著陣元數的不斷增大,獲得的孔徑越來越大. 表2 3種陣列孔徑比較 3種算法的計算量對比,差距主要來自于構造的高階累積量矩陣,當陣元數為Q時,MRS算法與ULS算法同樣都是構造一個[(Q+1)/2]×[(Q+1)/2]維的累積量矩陣,CPS算法構造一個 [(Q+1)(Q+5)/ 8-1]×1 維向量.由此可見,MRS算法與ULS算法計算量相當,CPS算法計算量較小,但其孔徑和估計精度不如MRS算法的. 在仿真試驗中,考慮如圖1所示的7陣元最優最小冗余對稱陣列以及表1中11陣元的非最優最小冗余對稱陣列,其位置矢量Y= (-13,-10,-6,-2,-1,0,1,2,6,10,13)d.為了驗證算法的性能,在相同陣元數情況下,將MRS算法與ULS算法以及CPS算法進行比較.在算法統計特性比較中,采用均方根誤差(Root Mean Square Error,RMSE)作為評價指標,即 (25) 實驗1 角度和距離譜圖.兩個相互獨立等功率的近場窄帶信號分別入射到圖1最優最小冗余對稱陣列和與其陣元數相同的等距均勻線陣(陣元間距λ/4) 上.信源位置參數分別為(-10°,3.5λ)和(8°,3.5λ),快拍數設為500,信噪比為 10 dB,仿真結果如圖3所示.圖3中S1代表第1個信源,S2代表第2個信源. 從圖3中可以看出,兩種陣列模型都可以在DOA估計中形成譜峰,并且沒有偽峰.但MRS算法譜峰更加尖銳,估計更為精確,更加接近真實角度.同時在距離估計中,MRS算法形成的譜峰遠遠好于ULS算法的.這說明,在陣元數較少的情況下,MRS算法相比于ULS算法,擴展了陣列孔徑,估計性能更好. 實驗2 多陣元DOA譜圖及空間分辨率.兩個相互獨立等功率的近場窄帶信號,分別入射到11陣元的非最優最小冗余對稱陣列和與其陣元數相同的等距均勻線陣以及文獻[10]互素陣列上.信源位置參數分別為(5°,10λ)和(15°,20λ),快拍數設為500,信噪比為 10 dB,分別畫出其DOA譜圖.縮小角度間隔,當信源位置參數變為(7°,10λ)和(9.5°,20λ)時,畫出DOA譜圖,結果如圖4所示. 從圖4可以看出,在角度間隔比較大時,MRS算法和CPS算法都可以在真實角度處形成比較尖銳的譜峰,可以分辨出兩個信號方向,而ULS算法則出現偽峰,無法分辨出兩個信號角度.而當角度非常接近時,MRS算法所形成的譜峰更接近真實角度,而CPS算法偏離了真實角度.這說明MRS算法相比于CPS算法有著更好的角度分辨率. 實驗3 算法統計特性仿真.兩個信源位置參數同實驗2的第1次仿真參數,仿真結果采用200次蒙特卡羅統計實驗.圖5給出了不同信噪比下3種算法方位和距離估計的均方根誤差圖,快拍數設為500.由于3種算法均采用高階累積量,算法精度受快拍數影響比較大.圖6給出了不同快拍數下3種算法的DOA和距離估計的均方根誤差圖,信噪比為 10 dB. 從圖5可以看出,3種算法的均方根誤差均隨著信噪比的增大而減小,MRS算法的估計性能明顯好于CPS算法以及ULS算法的,這是因為在同陣元數的情況下,MRS算法基于對稱最小冗余陣列模型,利用四階累積量重構陣列接收數據協方差矩陣,有著更大的陣列孔徑.而在距離估計中,3種算法對信源1的距離估計精度明顯大于信源2的,這表明信源距離越近,距離的估計就更加準確,定位精度更高,這與文獻[4]中的理論分析一致.從圖6可以看出,3種算法的均方根誤差均隨著快拍數的增大而減小,而MRS算法的估計精度明顯高于CPS算法以及ULS算法的. 文中提出了一種基于最小冗余對稱陣列的近場源角度和距離估計的協方差矩陣重構算法.該算法首先構造一個僅與信號角度有關的四階累積量矩陣,從而重構出陣列接收數據協方差矩陣,利用MUSIC算法進行信號DOA的估計,然后在估計出的角度方向的距離維上進行搜索,估計出信號的距離.該算法克服了傳統的基于均勻線陣方法造成孔徑和陣元數損失,陣列自由度不足陣元數一半的缺點,擴展了陣列的孔徑,擁有更好的估計精度和分辨概率,并且增加了陣列的自由度,可估計出更多的信源數目.2 最小冗余對稱陣列的定位算法
2.1 信號DOA估計




2.2 信號距離估計
2.3 虛擬陣元數分析

3 計算機仿真

4 結 束 語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
