基于模糊PID復(fù)合控制的醫(yī)用控溫毯控制系統(tǒng)設(shè)計(jì)
2018-12-21 07:12:00張?jiān)?/span>勾萬(wàn)強(qiáng)
機(jī)械工程與自動(dòng)化 2018年6期
關(guān)鍵詞:實(shí)驗(yàn)
張?jiān)迹慈f(wàn)強(qiáng),張 敏
(大連理工大學(xué) 機(jī)械工程學(xué)院,遼寧 大連 116024)
0 引言
隨著現(xiàn)代醫(yī)療技術(shù)的發(fā)展,醫(yī)用控溫毯在臨床醫(yī)療中被廣泛使用。最初醫(yī)用控溫毯采用壓縮機(jī)制冷、電熱絲加熱的方式對(duì)毯內(nèi)循環(huán)流動(dòng)的熱質(zhì)進(jìn)行溫度控制。傳統(tǒng)控溫毯制冷、加熱模式不統(tǒng)一直接導(dǎo)致冷熱毯不能在一臺(tái)主機(jī)上實(shí)現(xiàn),且效率低、體積較大,這些弊端大幅限制了控溫毯的使用范圍[1]。隨著半導(dǎo)體制冷/制熱技術(shù)的發(fā)展,基于半導(dǎo)體制冷技術(shù)的醫(yī)用控溫毯大大拓展了醫(yī)用控溫毯的使用場(chǎng)合,其原理是利用帕爾貼效應(yīng)[2]。半導(dǎo)體制冷/制熱技術(shù)簡(jiǎn)單可靠,效率較高,大大減小了設(shè)備體積。制冷/制熱模式的切換,可以通過(guò)改變半導(dǎo)體制冷器的電流方向?qū)崿F(xiàn)。功率大小可通過(guò)控制半導(dǎo)體制冷器兩端電壓高低進(jìn)行調(diào)節(jié)[3]。常用的溫控方式有PID控制和模糊控制,由于醫(yī)用控溫毯控溫過(guò)程屬于大慣性環(huán)節(jié),采用獨(dú)立的模糊或者PID控制,很難達(dá)到理想的控制效果,為此,本文設(shè)計(jì)了一種基于模糊PID復(fù)合控制的控溫毯控制系統(tǒng)。
1 醫(yī)用控溫毯控制系統(tǒng)硬件設(shè)計(jì)
設(shè)計(jì)的控制系統(tǒng)能夠?qū)崿F(xiàn)以下功能:①采集控溫毯各工作部分的溫度信號(hào)(因醫(yī)療儀器行業(yè)國(guó)家標(biāo)準(zhǔn)規(guī)定[4-5],此部分應(yīng)注意加入電器隔離設(shè)計(jì)),采集實(shí)時(shí)水位報(bào)警信號(hào);②通過(guò)觸摸屏與用戶進(jìn)行人機(jī)交互;③將各項(xiàng)數(shù)據(jù)處理后輸出相應(yīng)控制信號(hào),對(duì)半導(dǎo)體制冷制熱器進(jìn)行功率控制。
控制系統(tǒng)硬件包括主控板及驅(qū)動(dòng)板兩部分。主控板通過(guò)采集數(shù)據(jù)并進(jìn)行運(yùn)算,最終產(chǎn)生PWM控制信號(hào)給驅(qū)動(dòng)板;驅(qū)動(dòng)板采用大功率MOSFET陣列實(shí)現(xiàn)功率控制,采用兩個(gè)單刀雙擲繼電器實(shí)現(xiàn)電流換向。
2 系統(tǒng)控制方法設(shè)計(jì)
2.1 系統(tǒng)模型
國(guó)家標(biāo)準(zhǔn)規(guī)定:醫(yī)用控溫毯在加熱模式中,最高溫度不能超過(guò)42 ℃;制冷模式中,最低溫不能低于4 ℃。常用的溫度控制方式有PID控制和模糊控制,但是這兩種方式也有一定的局限性,PID控制容易產(chǎn)生超調(diào)、調(diào)節(jié)時(shí)間長(zhǎng)的現(xiàn)象;模糊控制雖然調(diào)節(jié)時(shí)間短,但是容易產(chǎn)生穩(wěn)態(tài)精度不高的現(xiàn)象。使用模糊PID復(fù)合控制方法不僅能使調(diào)節(jié)時(shí)間變短,而且能夠?qū)崿F(xiàn)較好的穩(wěn)態(tài)精度。因此本文設(shè)計(jì)出一種用于控溫毯的模糊PID復(fù)合控制方案。
圖1為醫(yī)用控溫毯控制系統(tǒng)模型,主要由模糊控制器和PID控制器構(gòu)成。兩個(gè)控制器與被控對(duì)象之間設(shè)置一個(gè)切換開關(guān),通過(guò)判斷偏差e與設(shè)定閾值ε的大小來(lái)選擇控制方式。當(dāng)e>ε時(shí),認(rèn)為系統(tǒng)處于動(dòng)態(tài)運(yùn)行過(guò)程,選擇模糊控制,可以發(fā)揮其調(diào)節(jié)時(shí)間短,沒有超調(diào)的特點(diǎn);當(dāng)e≤ε時(shí),認(rèn)為系統(tǒng)處于穩(wěn)態(tài)運(yùn)行的過(guò)程,選擇PID控制,可以發(fā)揮其穩(wěn)態(tài)精度高的特點(diǎn)。
2.2 模糊控制器設(shè)計(jì)
系統(tǒng)選擇雙輸入單輸出模糊控制器,主要有3個(gè)功能:①模糊化,即把確定量轉(zhuǎn)換為對(duì)應(yīng)的模糊量;②模糊推理,即根據(jù)操作者的控制經(jīng)驗(yàn)指定模糊控制規(guī)則,并進(jìn)行模糊推理得到一個(gè)模糊輸出量;③模糊判決,即把模糊量轉(zhuǎn)換成對(duì)應(yīng)的確定量。
模糊控制器的設(shè)計(jì)主要包括下面4個(gè)步驟:
(1) 輸入輸出語(yǔ)言變量選擇:輸入語(yǔ)言變量選擇實(shí)際溫度和給定溫度的偏差e以及偏差變化率ec,輸出語(yǔ)言變量選擇控制驅(qū)動(dòng)模塊的PWM占空比u。

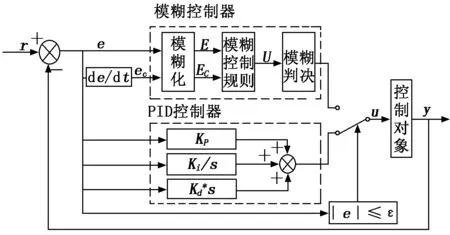
圖1 醫(yī)用控溫毯控制系統(tǒng)模型
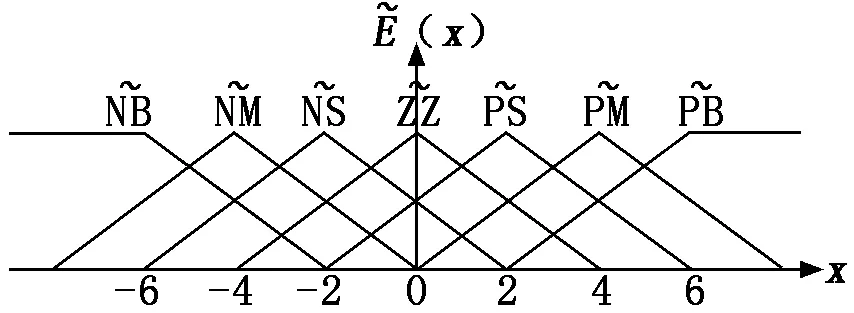
圖2 隸屬度函數(shù)

(3) 建立模糊控制規(guī)則表:雙輸入單輸出的模糊推理規(guī)則為:


其中:°為模糊集的合成運(yùn)算符。整體模糊控制規(guī)則如表1所示。
(4) 模糊決策:模糊控制器輸出的是一個(gè)模糊集合,模糊決策可以根據(jù)一個(gè)模糊集判決出一個(gè)確定的控制量作用于被控對(duì)象。這里采用加權(quán)平均法,輸出量計(jì)算公式為:
其中:l為單點(diǎn)集數(shù)目;yi為離散論域的點(diǎn);μ(yi)為相應(yīng)點(diǎn)的隸屬度函數(shù)值。
2.3 系統(tǒng)PID控制器設(shè)計(jì)
單片機(jī)屬于數(shù)字控制系統(tǒng)[6],所以PID控制器應(yīng)該選擇數(shù)字PID控制器,本系統(tǒng)選擇位置式PID控制器。位置式PID控制器表達(dá)式為:

其中:u(k)為第k個(gè)采樣時(shí)刻需要作用于被控對(duì)象的輸出量;Kp為比例環(huán)節(jié)系數(shù);e(j)為j時(shí)刻的偏差;e(k)為第k個(gè)采樣時(shí)刻的偏差;Ki為積分環(huán)節(jié)系數(shù);Kd為微分環(huán)節(jié)系數(shù)。
PID控制器設(shè)計(jì)的關(guān)鍵在于三個(gè)參數(shù)的整定調(diào)試。首先確定比例系數(shù)Kp,將積分系數(shù)和微分系數(shù)設(shè)為零,采用二分法逐漸增大,查看輸出響應(yīng),從中選取一個(gè)較為合適的Kp;然后保持Kp不變,將積分系數(shù)設(shè)為零,用同樣的方法調(diào)試微分系數(shù)Kd;最后調(diào)試積分系數(shù)Ki。這樣得到的三個(gè)系數(shù)并不一定是最優(yōu)系數(shù),還需要仔細(xì)微調(diào),從而得到較為滿意的控制效果。

表1 模糊控制規(guī)則表
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)使用uC/OS-Ⅱ嵌入式實(shí)時(shí)操作系統(tǒng),將整個(gè)系統(tǒng)劃分為6個(gè)任務(wù)[7]:時(shí)基任務(wù)、存儲(chǔ)任務(wù)、傳感器任務(wù)、控制任務(wù)、液晶任務(wù)、報(bào)警任務(wù)。時(shí)基任務(wù)主要作用是為其他任務(wù)提供計(jì)時(shí)服務(wù);存儲(chǔ)任務(wù)通過(guò)控制EEPROM芯片[8]對(duì)系統(tǒng)的一些重要數(shù)據(jù)進(jìn)行讀取、寫入,使系統(tǒng)斷電后仍可以存儲(chǔ)相關(guān)信息;傳感器任務(wù)負(fù)責(zé)采集各個(gè)傳感器的信號(hào)及狀態(tài);液晶任務(wù)負(fù)責(zé)與用戶進(jìn)行交互;報(bào)警任務(wù)實(shí)時(shí)監(jiān)測(cè)傳感器任務(wù)發(fā)送的信號(hào)量,對(duì)系統(tǒng)的運(yùn)行狀態(tài)進(jìn)行報(bào)警提醒;控制任務(wù)是整個(gè)控制系統(tǒng)最為核心的內(nèi)容,它決定了溫度的控制效果能否達(dá)到控制要求。控制任務(wù)的算法流程如圖3所示。首先進(jìn)行定時(shí)器通道和PWM輸出管腳的初始化,再設(shè)定模糊控制器和PID控制器的相關(guān)參數(shù),然后判斷定時(shí)采樣時(shí)刻是否到來(lái),如果到了采樣時(shí)刻則計(jì)算偏差和偏差變化率,將偏差同偏差閾值進(jìn)行對(duì)比,從而選擇模糊控制還是PID控制,最后輸出PWM控制信號(hào)。
4 實(shí)驗(yàn)
系統(tǒng)調(diào)試模擬用戶實(shí)際操作進(jìn)行,對(duì)系統(tǒng)分別進(jìn)行升溫及降溫兩項(xiàng)實(shí)驗(yàn),每項(xiàng)實(shí)驗(yàn)分三組進(jìn)行,分別為模糊控制、PID控制、模糊PID復(fù)合控制。
4.1 升溫實(shí)驗(yàn)
(1) 模糊控制升溫實(shí)驗(yàn):測(cè)試環(huán)境溫度為22.7 ℃,循環(huán)液體初始溫度為21.3 ℃,設(shè)置溫度為37.0 ℃,實(shí)驗(yàn)結(jié)果如圖4所示。
(2) PID控制升溫實(shí)驗(yàn):測(cè)試環(huán)境溫度為24.8 ℃,循環(huán)液體初始溫度為24.3 ℃,設(shè)置溫度為38.5 ℃,實(shí)驗(yàn)結(jié)果如圖5所示。
(3) 模糊PID復(fù)合控制升溫實(shí)驗(yàn):測(cè)試環(huán)境溫度為28.0 ℃,循環(huán)液體初始溫度為25.2 ℃,設(shè)置溫度為40.0 ℃,實(shí)驗(yàn)結(jié)果如圖6所示。
4.2 降溫實(shí)驗(yàn)
(1) 模糊控制降溫實(shí)驗(yàn):測(cè)試環(huán)境溫度為27.6 ℃,循環(huán)液體初始溫度為21.5 ℃,設(shè)置溫度為15.0 ℃,實(shí)驗(yàn)結(jié)果如圖7所示。
(2) PID控制降溫實(shí)驗(yàn):測(cè)試環(huán)境溫度為25.1 ℃,循環(huán)液體初始溫度為18.8 ℃,設(shè)置溫度為10.0 ℃,實(shí)驗(yàn)結(jié)果如圖8所示。
(3) 模糊PID復(fù)合控制降溫實(shí)驗(yàn):測(cè)試環(huán)境溫度為22.0 ℃,循環(huán)液體初始溫度為20.3 ℃,設(shè)置溫度為5.0 ℃,實(shí)驗(yàn)結(jié)果如圖9所示。
實(shí)驗(yàn)結(jié)果表明:獨(dú)立的模糊控制不論是升溫還是降溫都會(huì)有穩(wěn)態(tài)偏差較大的現(xiàn)象出現(xiàn)。獨(dú)立的PID控制不論是升溫還是降溫都會(huì)有溫度超調(diào)的現(xiàn)象出現(xiàn)。采用模糊PID復(fù)合控制不僅能很好地避免超調(diào)現(xiàn)象出現(xiàn),同時(shí)穩(wěn)態(tài)精度得到了很好的改善,系統(tǒng)達(dá)到穩(wěn)態(tài)時(shí),控制精度可達(dá)±0.2 ℃,系統(tǒng)采用的數(shù)字式溫度傳感器DS18B20[9]測(cè)量精度為±0.5 ℃,因此做誤差累計(jì),系統(tǒng)最終可將實(shí)際水溫控制在設(shè)定水溫的±0.7 ℃的范圍內(nèi),符合國(guó)家標(biāo)準(zhǔn)及設(shè)計(jì)要求。
5 結(jié)論
本文介紹了一種高精度醫(yī)用控溫毯控制系統(tǒng),創(chuàng)新性地采用了模糊PID復(fù)合控制方法,在設(shè)備可設(shè)定溫度范圍內(nèi),均可實(shí)現(xiàn)高精度的控溫調(diào)節(jié)。實(shí)驗(yàn)結(jié)果表明:該方法相比于傳統(tǒng)模糊控制及PID控制有魯棒性強(qiáng)、超調(diào)小、控溫精度高、調(diào)節(jié)時(shí)間短等特點(diǎn);在設(shè)定溫度范圍內(nèi),超調(diào)均不超過(guò)±0.7 ℃。在接下來(lái)的工作中,將對(duì)設(shè)備進(jìn)行電磁兼容測(cè)試。
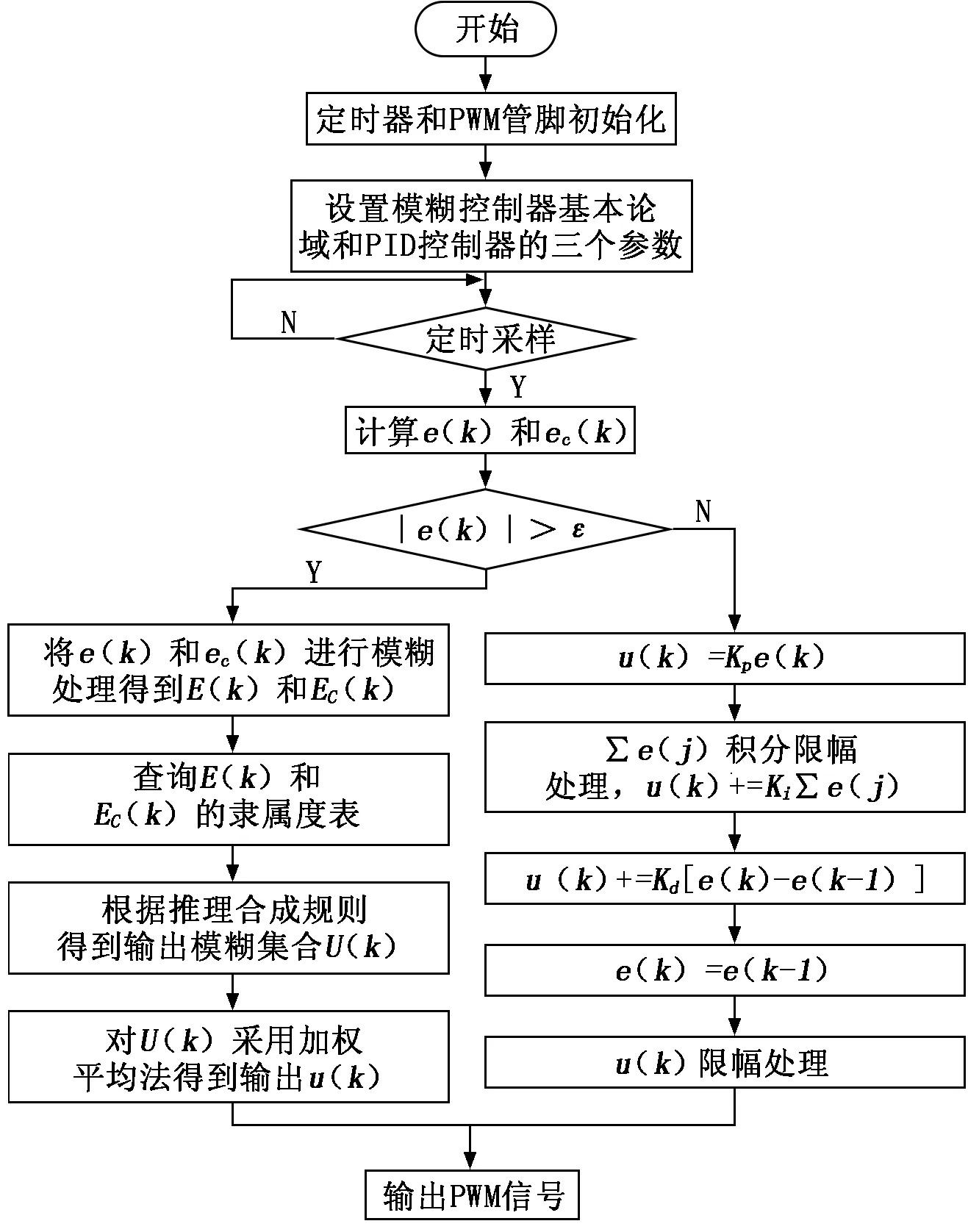
圖3 控制任務(wù)算法流程

圖4模糊控制升溫曲線圖5 PID控制升溫曲線圖6模糊PID復(fù)合控制升溫曲線

圖7模糊控制降溫曲線圖8 PID控制降溫曲線圖9模糊PID復(fù)合控制降溫曲線
猜你喜歡
作文·小學(xué)低年級(jí)(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(jí)(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(jí)(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
