汽車穩態回轉試驗中方向盤對試驗一致性影響研究
2018-12-28 11:54:16曾柯何大軍王倩
汽車實用技術 2018年23期
關鍵詞:一致性
曾柯,何大軍,王倩
(重慶車輛檢測研究院有限公司,國家客車質量監督檢驗中心,重慶 401122)
關鍵字:汽車穩態回轉試驗;試驗重復性;數據一致性
引言
汽車的操縱穩定性是決定汽車在高速行駛下安全性的重要因素之一[1]。有的文獻定義, 汽車的操縱穩定性是指駕駛員在正常行駛過程中,當遇到外界干擾時,車輛能夠有效抵抗干擾而恢復初始行駛狀態的能力[2]。隨著我國經濟的快速發展,人們的出行需求日益凸顯,因此這就對車輛本身的操縱穩定性提出了更高要求[3]。影響汽車操縱穩定性的因素包括:重心位置、車輪側偏剛度、轉向系剛度、轉向系傳動比、后軸側傾轉向系數及整車繞垂直軸的轉動慣量等[4]。
穩態回轉試驗是整個操穩試驗類型中一個重要權重占比很大的試驗,具有一票否決權[5],但是在實際的過程應用中經常會出現同一臺車在相同工況下試驗重復性和數據分析結果一致性差的問題,已有文獻[1]指出,操穩試驗中試驗數據處理是較大的難點,也有文獻[5]指出,對于試驗條件、試驗方法、及數據處理方法的微小差別,結果往往相差很大。但是還鮮有文獻提出切實有效的方法來解決操穩試驗中試驗數據的重復性及一致性問題,因此本文將操縱穩定性試驗中穩態回轉試驗作為研究對象,研究車輛在相同工況下方向盤控制這一因素對試驗重復性和數據結果一致性的影響,并提出改進方法,以提高重復性和一致性。
1 試驗方法及影響因素
穩態回轉試驗是操縱穩定性試驗集中一種非常經典的測試汽車操縱穩定性的試驗方法,現行試驗標準可參考[6]GB/T 6323-2014。根據標準在試驗之前需要對被試汽車及試驗場地環境進行確認,例如試驗之前需要測定車輪定位參數及輪胎狀態,若使用新輪胎則需進行200km行駛距離的磨合,若使用舊輪胎則試驗結束時輪胎花紋深度應大于等于1.6mm,同時應通過以下兩者之一的方法時輪胎升溫,分別為直線行駛10km或繞15m半徑圓周以3m/s2的側向加速度行駛500m;檢查底盤懸架及轉向系,若有異常或松動需進行調整和緊固,并同時檢查廠家規定的技術條件與實際是否相符。另外試驗場的場地與氣象條件也格外重要,要求場地干燥、平坦,為瀝青路面,坡度在2%以內,風速5m/s以內,溫度范圍為0℃~40℃。
試驗中應控制車輛轉彎半徑,使其轉彎半徑為不小于15m的圓周,并同時記錄下此時的方向盤轉角,作為重復試驗回轉圓半徑大小的量化指標。在加速過程中應保持緩慢且均勻地加速,其縱向加速度應控制在0.25m/s2以內。左右方向各進行3組試驗。
本次試驗所用到的儀器,待測物理量,分析方法及評價指標如下表1所示。

表1 穩態回轉試驗使用儀器、測試物理量及分析方法
試驗數據后處理過程除了實測物理量之外,還需要計算一些中間過程物理量,例如轉彎半徑、轉彎半徑比和前后軸側偏角差值。轉彎半徑的計算公式如下式(1)。

式中,Rk為第k點轉彎半徑;vk為第k點實測速度;γk為第k點實測橫擺角速度;通過轉彎半徑Rk與側向加速度擬合之后的曲線中找到側向加速度為0m/s2時所對應的Rk值定義為初始半徑R0。
汽車前后軸側偏角差值δ1-δ2計算方法如下:

式中,δ1為前軸側偏角,δ2為后軸側偏角,L為車輛軸距。前后軸側偏角差是一個很重要的中間過程物理量,因為最終的中性轉向點的側向加速度與不足轉向度都是通過前后軸側偏角差與側向加速度關系曲線處理得到,而前后軸側偏角差又與R0和Rk有緊密的聯系,R0的計算跟Rk曲線的走勢以及和截取的時間段有關,Rk最終和汽車的加速度過程和加速策略緊密相關的速度vk和橫擺角速度γk有關。
2 軟硬件平臺搭建
考慮到試驗過程中復雜的工況,狹小的空間位置,較多的不確定因素以及試驗人員儀器操作中防錯性,需要搭建一整套高精度,高可靠性,高模塊化程度和高防錯性的硬件試驗平臺。本文試驗中硬件平臺采用了陀螺儀作為動態傳感器,測力方向盤作為方向盤扭矩和轉角傳感器,GPS天線作為定位數據傳感器,集成的數據采集器以及適應嚴酷環境的高性能PC上位機。硬件平臺搭建邏輯如下圖1所示。
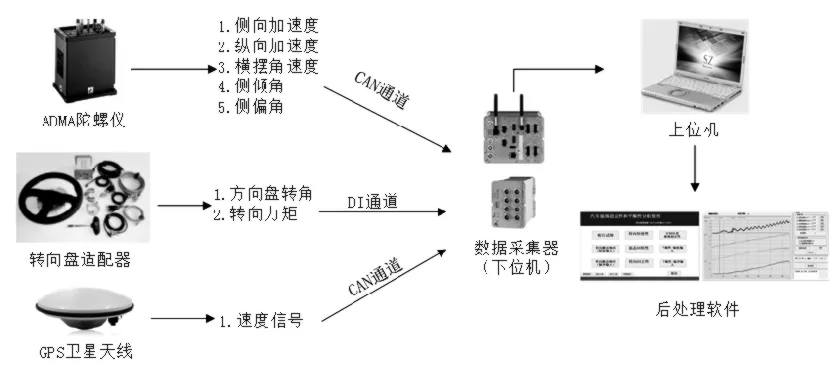
圖1 硬件平臺邏輯關系圖
其中陀螺儀采用的是 ADMA整車動態性能分析儀,是帶 DGPS(差分全球定位系統)的高精度陀螺測量系統。使用 ADMA還可以持續不間斷地測量俯仰角、側傾角和軌跡切線角,同時還能測定偏轉角和偏轉率。同樣也能精確測定側偏角。測力方向盤采用奇石樂公司開發的KiMSW 測量方向盤專為乘用車和多功能車型測試而設計。數據采集系統采用 imc公司開發的 CRONOSflex,其基本單元提供了 imc CRONOSflex數據采集系統的核心功能。軟件平臺包括兩部分,一部分是實時數據采集軟件,一部分是數據后處理軟件,都安裝在上位機里;實時數據采集軟件用來配置硬件模塊參數,車輛配置參數,數據采集和實時分析等。數據后處理軟件是用來對采集到的數據進行后處理分析,基于 imcFamos開發平臺開發的穩態回轉試驗數據后處理軟件交互性強,操作簡單,省去了中間計算過程,能夠快速得出分析結果,能夠有效地提高數據處理效率,讓研究人員能夠將更多的精力用到試驗研究本身上來。
3 穩態回轉試驗分析
3.1 試驗車輛
在長期的試驗工作中發現穩態回轉試驗的重復性和數據結果一致性很難得到保證,為了解決該問題,本課題開展了大量的試驗工作積累了大量的試驗數據,從試驗數據結果初步分析來看發現方向盤對試驗結果有很大的影響。為了研究車輛穩態回轉試驗中方向盤 波動性的影響,選擇某款城市客車作為研究對象如圖2,車型具體技術條件如下表2所示,在前文介紹的軟硬件平臺基礎之上,進行穩態回轉試驗,試驗地點為國家客車質量監督檢驗中心-重慶機動車強檢試驗場。

圖2 試驗車輛

表2 試驗車輛參數
某次穩態回轉試驗如下,車輛的質心位置在距車前軸1836mm,距車縱向中心線左側26mm,離車地板246mm處,將 ADMA陀螺儀通過支架安裝在質心位置處,加速策略采用 1-2-3檔逐級增加的策略,試驗之初通過駕駛員肉眼和經驗尋找回轉圓半徑,針對左側進行回轉試驗,將得到的數據分析結果如下表3所示。從數據結果可以看出,三次重復性試驗,計算得到的初始半徑R0,不足轉向度U和側傾剛度K都有不同程度的差別,通過方向盤轉角測量儀測得的三次試驗,方向盤轉角均值分別為-231.0度,-226.2度和-230.7度,對比7-18-1和7-18-2兩次試驗,在方向盤轉角波動性即方向盤轉角標準差一致時,研究方向盤轉角不同對試驗結果的影響,從表中可以看出方向盤轉角不同,計算得到的轉彎半徑也不同,因為車輛方向盤轉角的大小決定了回轉圓半徑的大小,所以方向盤轉角可以作為回轉圓半徑的量化指標。
同時不同的方向盤轉角對不足轉向度U,中性轉向點的側向加速度an和側傾剛度K均有較大的影響,這是由于采用駕駛員肉眼和經驗來尋找回轉圓半徑的結果,這樣尋找的回轉圓半徑會有很大的誤差,如表3,7-8-1和7-8-2兩組數據所示,反應到方向盤轉角可以看出兩次試驗,方向盤轉角差了 4.8度,如果尋找的回轉圓半徑不同,那么通過轉彎半徑與側向加速度擬合曲線取側向加速度為0km/h時的轉彎半徑為初始半徑 R0值就不同,進而汽車前后軸側偏角差值計算就會受到 R0值的影響,那么汽車前后軸側偏角差與側向加速度擬合曲線取側向加速度為 2m/s2時的斜率即不足轉向度U就會受到影響,因此若通過駕駛員的肉眼和經驗選擇回轉圓半徑就很難保證2次重復試驗的試驗結果一致性。
因此本文提出采用方向盤轉角作為度量回轉圓半徑的指標,GB/T 6323-2014規定回轉圓半徑不得小于15m,因此在試驗之初可以嘗試不同的方向盤轉角使得在正式試驗開始時固定某一初始方向盤轉角下回轉圓半徑不小于15m,并記錄下此時方向盤轉角,在進行重復試驗時只需將方向盤轉到該角度進行試驗,就能保證每次試驗的回轉圓半徑基本一致。

表3 第一次試驗數據統計表
采用了方向盤轉角作為量化回轉圓半徑大小的指標后,就可以在確定回轉圓半徑大小一致性情況下研究駕駛員控制方向盤在確定角度下的波動性即標準差對試驗結果的影響,從表3中7-18-1和7-18-5可以看出在方向盤轉角一致情況下,在整個試驗過程中方向盤轉角標準差不同對初始半徑R0和不足轉向度U均有較大影響,從圖3(a)、(b)、(c)可以直觀地看出3次重復試驗的整個試驗過程中方向盤轉角隨時間變化曲線,方向盤的波動一般在幾度和十幾度之間。這主要是由于在試驗的過程中車身隨路面的隨機振動疊加上駕駛員手臂的隨機抖動,就會使方向盤轉角試驗過程中并不是完全固定的,而是波動的,這種隨機波動會直接對車輛的速度和橫擺角速度產生直接的影響,由公式可知轉彎半徑 Rk是跟速度和橫擺角速度直接相關的,這種隨機波動進而會影響到Rk使初始半徑 R0的計算結果增加了一定的隨機性,再由公式可知R0的隨機性和Rk的隨機性會傳遞到前后軸側偏角差值使得側偏角差與側向加速度擬合曲線橫軸為 2m/s2處的平均斜率測不準。
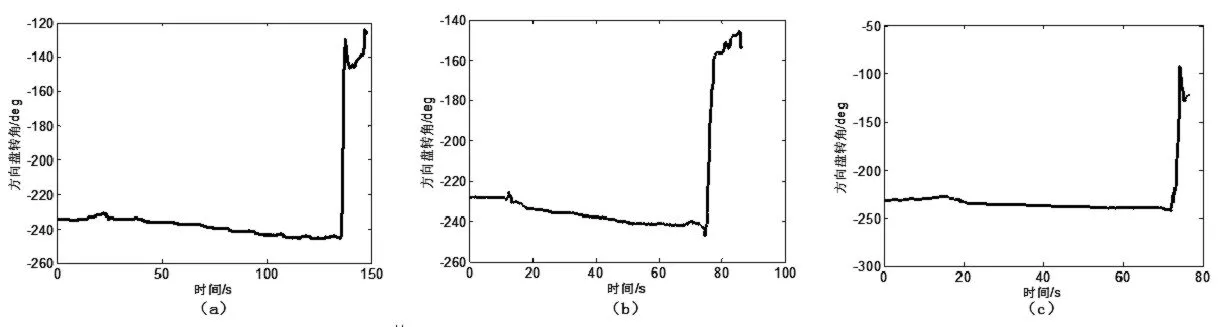
圖3 第一次試驗方向盤轉角曲線
為了解決方向盤波動性的影響,本文采用方向盤固定裝置在每次試驗中固定方向盤轉角。
采用上述方法進行試驗,同樣將 ADMA陀螺儀通過支架安裝在質心位置處,加速策略采用 1-2-3檔逐級增加的策略,參考地面半徑15m圓線尋找回轉半徑使得回轉半徑不低于15m,確定當方向盤轉角為297度時回轉半徑大于15m,采用本文設計的方向盤卡緊機構固定方向盤進行試驗,右轉方向進行3次重復試驗得到如下表4所示結果。從表中可以看出三次試驗方向盤角度均值基本吻合,并且方向盤轉角標準差控制在了0.6以內,得到的數據結果三次實驗R0,an,U,K的一致性均很好,進一步印證了方向盤的波動性對試驗結果一致性有很大的影響。

表4 第二次試驗數據統計表
8-14-10,8-14-11和8-14-12三次試驗方向盤轉角隨時間變化如下圖4所示,從圖中可以看出在試驗中將方向盤固定后方向盤的隨機波動變得很小,基本控制在了1度以內。

圖4 第二次試驗方向盤轉角曲線
4 總結與討論
本文針對汽車操縱穩定性試驗中數據結果重復性及一致性差的問題從方向盤轉角度方向展開了較為深入的研究,找到了控制方向盤轉角的方法并提高了試驗數據結果的重復性及一致性。可以得到如下結論:
(1)采用方向盤轉角作為量化回轉圓半徑大小的指標能夠解決憑駕駛員肉眼和經驗尋找回轉圓半徑的誤差,每次重復試驗只需確保方向盤轉角一致而無需重新找回轉圓半徑,這樣可以解決因為回轉圓半徑的不同對試驗數據重復性及一致性的影響。
(2)本文設計了一套方向盤卡緊機構,使方向盤轉角在每次試驗過程中角度能保持一致并且波動性達到最低,能有效地解決因為方向盤轉角波動性對試驗數據重復性及一致性的影響。
猜你喜歡
遼寧教育(2022年19期)2022-11-18 07:20:42
公民與法治(2022年5期)2022-07-29 00:47:28
汽車實用技術(2022年9期)2022-05-20 05:51:26
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
裝備制造技術(2020年11期)2021-01-26 00:39:12
中國公共安全(2017年11期)2017-02-06 05:28:08
電測與儀表(2016年7期)2016-04-12 00:22:18
燕山大學學報(2015年4期)2015-12-25 02:19:49
