兩個復雜網絡的指數同步的最優牽制控制
2018-12-29 01:04:00楊占英唐小云
中南民族大學學報(自然科學版) 2018年4期
楊占英,唐小云
(中南民族大學 數學與統計學學院,武漢 430074)
復雜網絡的同步是指網絡中各個相互作用節點趨于一致的行為,它在物理學、生物學、化學、經濟學和社會學都有廣泛的應用. 在現實中,許多網絡的同步通過自身的耦合是難以實現的,即使可以也需要付出很大的代價,這時就需要利用一些控制方法.對于復雜的大規模網絡來說,牽制控制是一個簡單有效的方法. 牽制控制的基本思想是通過控制網絡中的部分節點,來達到有效控制整個網絡的目的.
在以往的一些牽制方法[1-4]中,有的需要耦合強度充分大,有的需要反饋增益很大,還有的計算量會非常大,這在復雜網絡控制應用中都是難以實現的, 對于控制方法而言,我們總是希望用較小的控制代價來實現控制目標.Li R, et al[5]利用耦合強度和反饋增益定義控制代價,發現牽制網絡中牽制度小的節點可能會比牽制度大的節點所需的代價小.隨后,Wang L, et al[6]利用此代價函數研究了牽制節點數目的估計,完成了基于線性矩陣不等式的牽制控制策略分析. 在文獻[7]中,Zhao J C, et al研究了復雜網絡在弱耦合強度下的優化線性反饋牽制控制問題,通過選取與牽制比和反饋增益比相關的代價函數,找出受控節點和反饋增益間的平衡.此外,Porfiri M, et al為避免同時控制網絡中所有節點,提出了點對點優化牽制控制策略[8].
在本文中,我們考慮了兩個線性耦合復雜動態網絡的指數同步問題.基于線性反饋牽制控制,給出了兩層網絡達到全局指數同步的條件.對于滿足條件的牽制節點數和反饋增益,它們二者中的一個減小通常會引起另一個的增大,因此,我們需要找到二者的最優組合.這里,通過具體例子,展示了牽制節點數和反饋增益這一可行組合的確定步驟.同時,受文[7]中的評價函數的啟發,我們定義一個評價函數并找出最優組合. 此外,通過仿真,分析了最優牽制比(最優組合中的牽制節點數目與總節點數目之比)與耦合強度、網絡稠密程度的相關性.最后,給出兩個例子驗證了該最優控制方法的有效性.
1 模型描述和預備知識
考慮N個不同節點線性耦合的復雜動態網絡,其中每個節點都是n維的動力系統,具體模型如下:
(1)

考慮另一個具有N個節點方程(1)同構的復雜動態網絡,模型如下:
(2)
其中,yi=(yi1,yi2,…,yin)T∈Rn是第i個節點的狀態變量,ui是待設計的控制器. 通常方程(1)被稱為驅動網絡,方程(2)被稱為響應網絡.
定義1 假設存在常數M和α>0,使得:
則稱驅動網絡(1)與響應網絡(2)達到全局指數同步.
假設1 對于fi(x)∈C(Rn,Rn),i=1,2,…,N,存在常數δi,對任意的x,y∈Rn有:
(x-y)T(fi(x)-fi(y))≤δi(x-y)T(x-y),
上述條件通常稱為全局Lipschitz條件,δi稱為Lipschitz常數.容易驗證,一些混沌系統,如Chua′s電路和R?ssler-like系統都滿足此條件.
引理1[1]假設
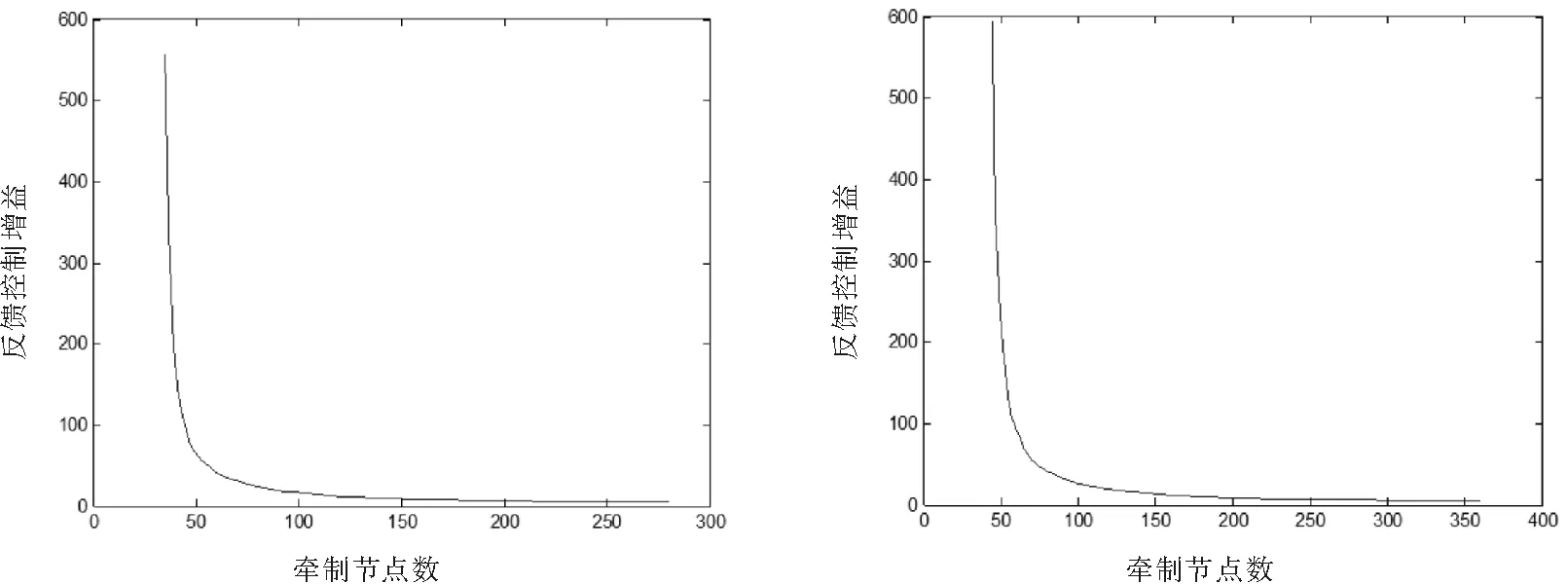
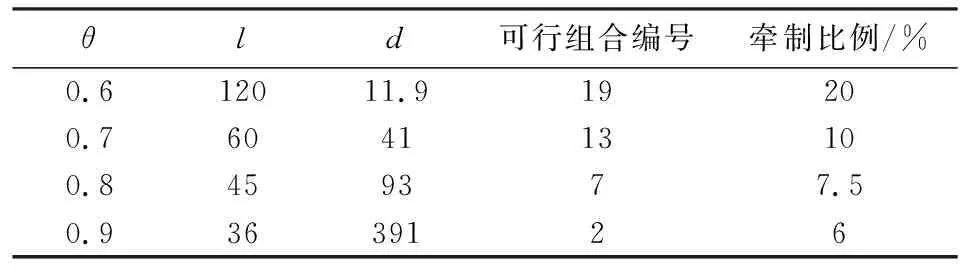
其中H,D∈RN×N,H1,D1∈Rr×r(1≤r 要使引理1成立,di必須是無窮大,這使得實際中其應用非常受限. 為解決這一問題時,Zhao J C, et al在文[7]中引入了一個松弛因子ε0,進一步分析了引理1的結果. 引理2[7]若λmax(H2)<0,則對某個0<ε0< |λmax(H2)|,一定存在d>0,使得當di≥d(1≤i 先引入驅動網絡和響應網絡達到全局指數同步的一個線性反饋牽制準則. 不失一般性,假設響應系統的前l個節點為牽制節點,控制器具體如下: 其中d>0為反饋控制增益. 記ei=yi-xi,i=1,2,…,N,則誤差系統為: (3) 證明構造一個Lyapunov函數 沿著誤差動態系統(3)計算V(t)對t的導數可得: [δ+cγ(λl+1+ε0)]eTe, 注:如果牽制節點數目l確定,根據定理1,我們可以找到一個最小的反饋增益d使得網絡(1)和(2)達到全局指數同步,同樣如果反饋增益d確定,根據定理1牽制節點的數目也有一個最小值,達到這個值,網絡(1)和(2)可以達到全局指數同步. 一般來說,牽制節點數目越多,反饋增益就越小,反之亦然.根據定理1,我們可以得到一系列的(l,d)組合,使得網絡(1)和(2)達到全局指數同步.在實際應用中,為降低控制代價,自然希望牽制節點數目l和反饋增益d最好都比較小.為此,我們嘗試在所得的可行的(l,d)組合中找出一個最優的組合. 在本節中,驅動和響應網絡均采用400個節點的無標度網絡(其中m0=12,m=10),在下面的討論和仿真中,我們取內耦合矩陣P是一個單位矩陣,對于3種牽制方式:牽制度大的節點、牽制度小的節點和隨機牽制節點,發現3種牽制方式的矩陣Mi最大特征值曲線有一個交點(此時l=180). 當l不超過180時,牽制度大的節點這一方式的矩陣Mi的最大特征值比其他兩種方式的遞減速度要快些,如圖1所示. 根據定理1,在給定l和δ后,牽制度大的節點的方式需要的牽制節點數要少,因此選擇牽制度大的節點;同理,當l大于180時,就要選擇牽制度小的節點. 這里,假定仿真中的l不超過180,并且選擇牽制度大的節點. 圖1 Mi的最大特征值相對于牽制節點數的變化Fig.1 The maximum eigenvalue of Miwith respect to the number of pinned nodes 對于驅動和響應網絡,我們取每個節點都是3-D的R?ssler-like系統,節點的動力學方程描述為: 其中x=(x1,x2,x3)T∈R3,α=0.05,β=1.5,γ=0.2,μ=1.5,ε=0.75,ρ=21.43,?=0.0075. 圖2 無牽制時E(t)的變化Fig.2 Evolution of E(t) without pinning 表1 可行組合(l,d) Tab.1 Feasible combination (l,d) 圖相對于可行組合編號的變化趨勢Fig.3 The trend of with respect to the number of feasible combination 表2 不同評價函數下的最優解Tab.2 The optimal solution with different evaluation functions 圖4 E(t)在l=27,d=134時的變化趨勢Fig.4 Evolution of E(t) with l=27,d=134 圖5 最優牽制比相對于c的變化趨勢Fig.5 The trend of the optimal pinning ratio with respect to c 此外,通過數值仿真發現,當網絡結構和節點動力學固定時,網絡耦合強度c的變化對最優牽制比是有影響的,具體如圖5所示. 可以看出,隨著c的增加,最優牽制比總體上是遞減的,除了個別位置(如c=1處)呈現微增. 當c=0.1~0.48時,遞減趨勢比較明顯,之后的遞減比較緩慢,說明c比較小時,其較小的擾動都會對最優牽制比有很大的影響,c較大時,其較小的擾動對最優牽制比的影響不是很明顯. 同時,當節點動力學、耦合強度和內耦合矩陣固定時,最優牽制比也依賴于網絡的稀疏程度. 給定m0,當m逐漸增加時(網絡越來越密),最優牽制比逐漸減小,具體如表3所示. 表3 m0=12時,不同m下的最優牽制比 另外,為了驗證評價函數模型的可行性,選擇N=600和N=800兩種不同規模的無標度網絡進行仿真,耦合強度c同樣取0.32,得到兩種情況下的可行組合(l,d),見圖6、圖7,表4、表5. 結合圖7(a)和(b),發現它們與N=400時的情形一樣,參數θ取0.8時評價函數仍是最優的.根據表4和表5,發現耦合強度為0.32時,這3種規模網絡的最優牽制比均在7%左右. (a) N=600 (b) N=800圖6 N=600和N=800時的可行組合(l,d) Fig.6 Feasible combination (l,d) with N=600 and N=800 (a) N=600 (b) N=800圖7 N=600和N=800時,相對于可行組合編號的變化趨勢Fig.7 The trend of with respect to the number of feasible combination when N=600 and N=800 Tab.4 The optimal solution with different evaluation functions whenN=600 θld可行組合編號牽制比例/%0.612011.919200.7604113100.8459377.50.93639126 表5N=800時不同評價函數下的最優解 Tab.5 The optimal solution with different evaluation functions whenN=800 θld可行組合編號牽制比例/%0.616011.921200.77050138.750.85711087.1250.94735435.875 本文研究了兩個同構的線性耦合復雜動態網絡的指數同步的最優牽制問題. 基于線性反饋牽制控制,給出了兩個網絡達到全局指數同步的條件.對于滿足條件的牽制節點數和反饋增益的組合,通過具體例子展示它的計算方法,并利用定義的評價函數給出了它們的最優組合,同時還給出了兩個例子驗證了該方法的有效性. 此外,仿真結果表明了網絡的耦合強度和稠密程度對最優牽制比有一定的影響.這些結果將為工程技術工作提供一些參考.2 全局指數同步的牽制準則與優化





3 數值仿真














4 結論
