繩驅動機器人被動解耦模塊的設計及驗證研究*
2019-01-02 02:20:56華達人王堯堯李彬彬
機電工程 2018年12期
華達人,王堯堯,2,李彬彬,鞠 鋒,2,陳 柏*
(1.南京航空航天大學 機電學院,江蘇 南京 210016; 2.浙江大學流體動力與機電系統國家重點實驗室,浙江 杭州 310027)
0 引 言
目前,繩索驅動的機器人在相關研究和應用領域受到了廣泛關注。繩驅動關節型串聯機器人采用繩索作為驅動介質,使得驅動單元后置于底部基座處,大大減小了機器人的運動質量與慣量,一方面大幅度提高了機器人的負載自重比,另一方面降低了機器人的功耗。同時,由于繩索自身的柔順性,使機器人在緩沖、吸振等方面有較好的性能,提高了交互安全性。然而,在采用繩索對機械臂關節進行驅動時,由于關節的驅動單元置于基座位置,繩索的走線纏繞常常會導致多關節間發生運動耦合,使得關節驅動精度發生退化。
為了實現各個關節間運動的獨立,解決繩驅關節運動耦合問題成為學者們的研究熱點。MIT大學的TOWNSEND W T等人[1-2]設計出了WAM繩驅動七自由度擬人機械臂,采用差速繩索驅動關節,使得4個繩索驅動關節不發生耦合,目前已成功應用在醫療、服務、科研等多個領域;韓國燃料循環系統技術研究院的LEE J K等人[3-4]研制了基于滑輪-繩索驅動的BTSM關節型主從機械手,設計了由動滑輪組和連桿組成的解耦模塊,實現了相鄰關節間的運動解耦[5];Nebraska-Lincoln大學的ZHAO Bao-liang等人[6]提出了一種基于行星齒輪的旋轉關節的繩索解耦機構,并提出了一種與行星齒輪等價的繩驅動機構;德國Igus公司設計了模塊化的繩驅動機器人Robolink,采用自行設計的“Bowden cable segment”套管,通過繩索-滑輪和套索兩種形式相結合進行走線實現運動解耦,目前已做成模塊化產品。除此之外,也有一部分學者采用主動解耦的方式,在算法上實現各關節的運動獨立。Stanford大學QUIGLEY M[7-8]的柔順7自由度機械臂采用軟件補償,在肩肘關節間、肩關節俯仰、偏航兩自由度方面實現了主動解耦;在國內,北京航空航天大學陳偉海教授等[9-10]研制了擁有冗余機器人靈活性的擬人臂機器人,通過分析運動學分析耦合關系進行算法補償,并通過仿真驗證了其正確性;東南大學王興松教授團隊[11-12]設計了一種重力平衡的上肢外骨骼繩驅機器人,采用類似剎車線構型的繩索-套筒方式驅動,避免了繩驅關節耦合問題。
針對繩驅動機器人存在的關節運動耦合問題,本文將提出一種繩驅動被動解耦機構。
1 繩驅動關節運動耦合分析
基于繩驅動的機械臂關節,其關節運動常常與驅動繩索走線穿過的前端關節運動相耦合。繩驅動關節耦合因前端關節的類型不同而有著不同形式的耦合,最常見的繩驅動串聯機器人關節形式主要是俯仰關節和回轉關節。
俯仰關節運動耦合分析示意如圖1所示。

圖1 俯仰關節繩索走線示意圖
由于繩索受拉不受壓,每個關節需要有兩股繩索驅動其正反向運動。初始位姿下,后端關節左右驅動繩索均在前端關節中心導向滑輪纏繞θ角度。
回轉關節運動耦合分析示意如圖2所示。

(a)初始位姿

(b)旋轉后位姿圖2 回轉關節繩索走線示意圖
當前端關節按如圖2所示方向旋轉θ1后,導致后端關節左、右驅動繩索將沿著前端關節中心導向滑輪分別脫離/纏繞θ1角度的繩長段,繩長變化為:
(1)
式中:l1,l2—左右驅動繩索與后端關節連接的末端的位移變化;r—繩槽半徑。
后端關節因此產生相對應繩長的關節旋轉,也即關節運動耦合現象,耦合的運動轉角為:
(2)
式中:r1—后端關節的繩索驅動半徑;θ2—后端關節耦合轉角。
因此可知,當前端關節為俯仰關節時,前、后關節運動存在線性耦合。
當前端關節為回轉關節,后端關節驅動繩索經過前端關節時走線方式如圖2(a)所示。前端關節運動帶動連桿2繞當前關節中心軸旋轉θ1角度。后端關節左右驅動繩索由于連桿2上導線滑輪的作用,兩股繩索經過前端回轉關節時將發生扭轉纏繞,如圖2(b)所示。由于后端關節驅動繩索下側末端與基座處的驅動單元固連,此時兩股繩索的上側末端均產生向下的位移,且末端位移大小隨著前端關節的旋轉呈非線性變化。由此可知:當前端關節為回轉關節時,前、后關節運動存在非線性耦合。
另外,回轉關節運動會導致后端關節驅動繩索扭轉纏繞,當機器人關節較多時,多股后端關節驅動繩索間的纏繞將對機器人本身的可靠性帶來不利影響。同時,隨著前端關節的轉動,扭轉纏繞的繩索內部張力將逐漸增大,使得驅動后端關節變得困難,一方面加劇繩索本身損耗,另一方面制約了繩驅動關節型機器人驅動控制的可靠性和穩定性。
由上述分析可知:當前端關節為俯仰關節時,即前后關節軸線平行時,前、后關節間存在運動線性耦合;當前端關節為其他關節形式,即前、后關節軸線不平行(上述回轉關節為關節軸線垂直呈90°)時,前、后關節間存在運動非線性耦合。當耦合現象存在時,后端關節將不能穩定、可靠地驅動控制。
為此,研究人員需要尋求一種新型的繩索走線方式,在能夠對關節的穩定可靠地驅動的基礎上,實現前端關節與后端關節間的運動被動解耦。
2 繩驅動被動解耦模塊設計
2.1 被動解耦模塊結構設計
針對上述繩驅動關節運動耦合問題,本文提出了一種模塊化的被動解耦機構。該被動解耦模塊的結構如圖3所示。

圖3 被動解耦模塊結構示意圖
從左往右依次是:固定輪、驅動繩索導線盤(前側)、解耦繩索導線盤(前側)、隨動輪、解耦繩索導線盤(后側)、驅動繩索導線盤(后側)、主動輪。主動輪與中心軸由螺釘固定在一起,其余輪盤均通過法蘭軸承安裝在中心軸上,且軸向位移均被固定。其中,隨動輪徑向兩側分別安裝有驅動繩索轉向滑輪、解耦繩索轉向滑輪,用于后端關節驅動繩索和解耦繩索在解耦模塊中的走線換向。固定輪和主動輪盤面上加工有通孔,用于解耦繩索固定和后端關節驅動繩索導線滑輪的布置。圖中兩股解耦繩索繩長相等且固定,解耦繩索前端與固定輪固定,經過固定輪上通孔后穿過前側驅動繩索導線盤上的通孔,然后由解耦繩索導線盤的小孔進入并沿前側解耦繩索導線盤上的繩槽自上而下纏繞,到達隨動輪上與解耦繩索導線盤切合的解耦繩索轉向滑輪處,沿滑輪走線到隨動輪的后側,隨后按對稱的方式沿著后側解耦繩索導線盤繩槽,穿過驅動繩索導線盤,最后到達主動輪上與主動輪固定連接。
驅動繩索在被動解耦模塊中走線方式與驅動繩索類似,進入模塊沿驅動繩索導線盤和轉向滑輪正反纏繞后出模塊。
2.2 解耦原理分析
被動解耦模塊的工作示意如圖4所示。

圖4 解耦模塊工作示意圖
固定輪與關節基座固定,主動輪與前端關節連桿固連。前端關節由置于基座處的驅動單元驅動,通過前端關節驅動繩索傳遞運動和力。后端關節通過后端關節驅動繩索驅動,該繩索從基座處的電機出發,走線穿過運動解耦模塊后,與后端關節處的連桿固定。
解耦模塊解耦效果示意如圖5所示。

圖5 解耦模塊解耦效果示意圖
從繩索本身纏繞變化來看,當主動輪以圖5中所示方向轉動時,后端關節左驅動繩索將沿驅動繩索導線盤(后側)繩槽脫離,與此同時,后端關節右驅動繩索將沿繩槽纏繞,因此原因造成左、右驅動繩索后側末端將產生位移,位移大小為:
(3)

然而因解耦繩索帶動隨動輪旋轉,導致左右驅動繩索后側末端的速率與隨動輪角速率的關系為:
(4)
左、右繩索因隨動輪帶動末端位移大小為:
(5)
式中:v1,v2—左、右驅動繩索后側末端速度;s1,s2—左、右驅動繩索因解耦模塊而產生的末端位移。
綜上以上不同類型的繩驅動關節型機器人的運動耦合問題,可見后端關節驅動繩索在經過該被動解耦模塊后,繩索的末端不再有相對位移,實現了運動量的被動補償,且多股繩索間不會出現擰繩等不可靠的驅動狀態,從而實現了繩驅動機器人多關節間的運動被動解耦。
3 運動解耦性能驗證
3.1 被動解耦模塊驗證平臺
為驗證該被動解耦模塊的解耦效果,筆者搭建了解耦驗證實驗平臺,實驗平臺結構示意如圖6所示。

圖6 解耦驗證平臺示意圖
所涉及兩個關節軸線呈90°夾角,后端關節驅動繩索從解耦模塊出來后直接驅動后端關節。編碼器1讀取前端關節運動轉角,編碼器2讀取后端關節運動轉角。基座處安裝有前端關節的驅動單元,電機驅動基座上的同步帶組件運動,由同步帶帶動末端固定在在同步帶上的驅動繩索,前端關節驅動繩索經導向滑輪導向走線后直接驅動前端關節正反轉。
由于驗證解耦效果需要保證前后關節運動獨立,本研究將后端關節驅動繩索的前側末端與基座固連,等效于后端關節驅動單元抱閘,隨后后端關節兩股驅動繩索經過被動解耦模塊纏繞走線,從解耦模塊出來后直接驅動后端關節。
解耦驗證實驗平臺整體樣機如圖7所示。
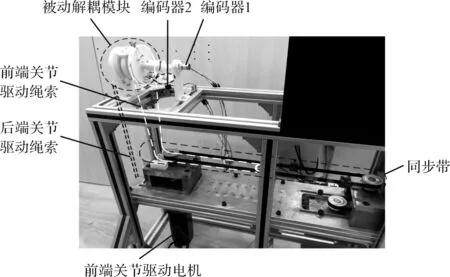
圖7 解耦驗證實驗平臺樣機
為驗證該繩驅動解耦模塊的運動解耦效果,本文設計實驗對該機構的運動解耦性能進行評價分析。對繩驅動系統的兩驅動繩索進行初始預張緊,實驗中,前端關節的驅動電機工作在位置模式,對前端關節電機施加位置控制命令,驅動前端關節作正弦往復轉動;通過讀取兩伺服驅動器的外部編碼器寄存器實時獲取關節編碼器1、2的脈沖數據信息,從而得到兩關節間的運動的獨立關系。
3.2 實驗及結果分析
驗證實驗結果如圖8所示。

圖8 解耦效果驗證結果虛線—前端關節運動轉角隨時間變化的曲線;實線—實驗中編碼器2所得后端關節在經過解耦模塊后的關節角變化曲線
電機驅動前端關節作正弦往復運動,運動范圍在-90°~90°。根據前述關節運動耦合關系分析可知:若無被動解耦模塊,后端關節由于驅動繩索末端受前端關節運動影響,將會產生相應的耦合運動,其關節運動轉角的跟隨耦合關系如圖中點畫線所示;從實驗數據曲線可知:經過被動解耦模塊解耦后的后端關節驅動繩索帶動后端關節運動并未出現關節間的運動耦合,關節轉角近似一條水平線,也即前、后關節間的運動獨立性好,說明了該被動解耦機構具有良好的解耦效果。
但從實驗結果曲線中也不難發現,后端關節轉角在t=0 s、t=4 s、t=8 s、t=12 s等位置出現了關節轉角偏移,偏移范圍在±2.9°。
后端關節轉角兩個往復運動周期內的實驗數據變化趨勢放大觀察如圖9所示。

圖9 后端關節轉角變化曲線
每個周期大致可分為A、B、C、D 4個變化階段。以第一個周期為例,在A1階段,前端關節開始正向運動,后端關節轉角向前端關節運動方向的反向偏移了2.9°;在B1階段,后端關節轉角保持不變;到C1階段,前端關節換向,后端關節向前端關節運動方向的反向偏移了2.6°;在D1階段,后端關節轉角不變,維持在-0.3°。對于A1、C1兩次轉角偏移,主要由于前端關節驅動方向發生變化,換向過程中,后端關節左右驅動繩索和解耦模塊兩股解耦繩索發生松緊狀態切換,由于繩索本身有一定的伸縮性,導致解耦機構的隨動輪有一定的滯后轉動,同時后端關節也發生一定的滯后轉動,兩者綜合造成A1、C1兩處的轉角偏移。對于D1階段,后端關節最終在一個周期后保持在-0.3°的轉角偏移,主要是由于制造、裝配誤差導致左、右兩驅動繩索在解耦模塊中的走線存在輕微的不對稱。
實驗中,為減小A、C階段由于繩索本身伸縮性導致的轉角偏移,本研究先對解耦繩索加強預張緊,然后對解耦繩索和驅動繩索同時加強預張緊,并將3次實驗結果進行對比,對比實驗結果如圖10所示。

圖10 加強預張緊力后后端關節轉角曲線
圖10中:曲線1—原始數據;曲線2—加強解耦繩索預張緊后后端關節轉角變化曲線;曲線3—同時加強解耦繩索和驅動繩索預張緊后后端關節轉角變化曲線。
對比曲線1和曲線2可以發現:在加強兩股解耦繩索的預張緊后,后端關節轉角換向滯后時間更短,但轉角偏移增大,這主要是由于在解耦繩索張緊后,解耦繩索換向時松緊切換更快,從而能更早地驅動解耦模塊中隨動輪跟隨轉動,從而消除前、后關節運動耦合,但也正是因此,減弱了后端關節跟隨前端關節運動耦合的同向轉動變化量,由于后端關節驅動繩索伸縮性帶來的相對前端關節運動反向的偏移沒有變化,相對于曲線1總體角度偏移增大;對比曲線2和曲線3可以發現:在加強解耦繩索預張緊后,再對驅動繩索加強預張緊,后端關節轉角換向滯后時間不變,轉角偏移減小,顯然,由于后端關節驅動繩索伸縮性帶來的相對前端關節運動反向的偏移減小,最后轉角偏移減小;而對比3條變化曲線可以發現:由于加工裝配帶來的不對稱誤差無法通過張緊措施來消除。
綜上實驗分析可知:為改善被動解耦模塊的解耦效果:(1)要適當加強繩驅動系統各股繩索的預張緊力,以加快換向時繩索松緊邊的切換,從而減小運動滯后;(2)提高機構的加工制造裝配的精度,減小由此帶來的不對稱誤差。
4 結束語
本文詳細分析了繩驅動關節型機器人存在的前后關節運動耦合問題,針對繩驅關節耦合問題,創新設計了一種被動解耦機構,通過一種新型的繩索走線方式消除了繩驅動關節型機器人前后關節的運動耦合;搭建了被動解耦模塊的實驗平臺驗證了解耦模塊具有不錯的解耦效果,并對實驗數據中所表現出來的轉角偏移問題進行原因分析,針對預張緊力的影響效果進行改進對比實驗,由對比實驗結果得到了改善解耦效果的方式方法。
對于本文所設計的被動解耦模塊,后續將進行不同拉伸剛度的繩索進行對比實驗,從而對繩驅動關節型機器人的整體結構進行優化;同時,未來將對解耦模塊的力位傳遞特性進行建模,為被動解耦的繩驅動機器人精確力位控制奠定基礎。
