基于Simulink的汽車ABS仿真分析
2019-01-02 05:08:18趙垚森徐小東
機電工程 2018年12期
趙垚森,朱 勇,徐小東
(重慶交通大學 機電與車輛工程學院,重慶 400074)
0 引 言
我國ABS技術的研究開始于20世紀80年代初。近年來,我國參考聯合國歐洲經濟委員會的汽車制動法規R13的附件13《采用制動防抱裝置的車輛的試驗要求》,也相應制定了強制安裝ABS系統的國家標準GB13594-92[1]。
本文將通過軟件搭建ABS的仿真模型[2],模擬驗證汽車的制動工況,探討汽車安裝ABS的必要性。
1 汽車ABS數學模型
1.1 車輛動力學模型
本文采用最簡便的單輪車輛模型,并且假定車輪載荷為固定值[3],忽略風阻和車輪滾動阻力。由此可得車輛動力學方程:
(1)
(2)
車輛縱向摩檫力:F=μN
(3)
式中:M—車輛總質量的1/4;υ—車輛行駛速度;F—縱向摩擦力;I—車輪的轉動慣量;ω—車輪角速度;R—車輪行駛半徑;Tb—制動器制動力矩;μ—縱向附著系數;N—地面支持力。
根據上面的車輛動力學方程,筆者建立對應的仿真模型。將車輪轉速、車輛速度以及制動距離這3個指標作為輸出結果,將縱向附著系數和制動力這2個參數作為該模型的輸入。
1.2 汽車輪胎模型
常用的輪胎模型有魔術公式模型、雙線性模型等[4],本文采用魔術公式模型。縱向附著系數與滑移率之間存在如下關系:
μ(S)=
f+Dsin{Carctan[BS-E(BS-arctan(BS))]}
(4)
式中:μ—縱向附著系數;f—輪胎的靜摩擦系數;B—剛度因子;C—曲線形狀因子;D—峰值因子;E—曲線曲率因子;S—滑移率。
其中,輪胎的靜摩擦系數f相當于車輪在純滾動時的附著系數,通常認定為0[5]。B、C、D、E這4個參數均為常數,其與路面息息相關,仿真模型中的地面附著系數可以通過這4個參數值的變化而變化,進而模擬不同狀況的實際路面。對于干燥瀝青路面,利用Simulink多次驗證,此處取B=16,C=1.65,D=0.85,E=0.9[6]。
1.3 制動系統模型
制動系統主要包括傳動機構和制動器。其中傳動機構主要指液壓傳動系統,通常主要是考慮制動力調節器的制動壓力與電磁閥電流變化的關系[7]。此處選擇性地忽略壓力傳送的延遲和電磁閥彈簧的非線性因素,將制動系統中的傳動機構簡化為一個電磁閥和一個積分環節[8]。傳遞函數表示為:
(5)
式中:K—系統增益,取100;T—時間常數,通常取0.01[9]。
即有:
(6)
制動器的建模主要考慮到制動氣液壓力的變化對制動器力矩改變的影響。假設制動器為理想元件,忽略滯后性帶來的影響。因此,制動器方程為[10]:
Tb=Kf·P
(7)
式中:Tb—制動器制動力矩;Kf—制動器制動系數;P—制動器氣液壓力。
1.4 滑移率模型
滑移率是指在車輪運動中滑動成分所占的比例,常用S來表示,其表達形式如下:
(8)
式中:υ—車速;ω—車輪滾動角速度;R—車輪半徑。
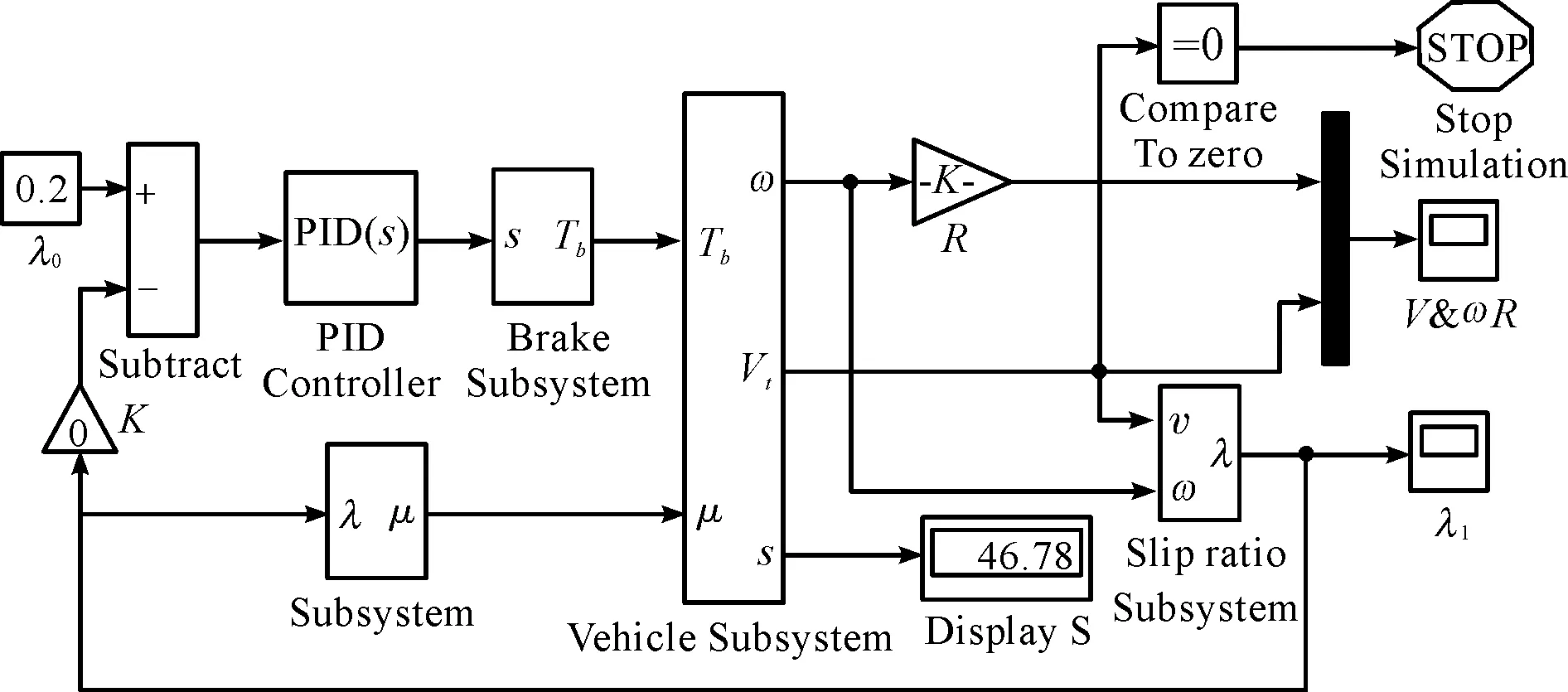
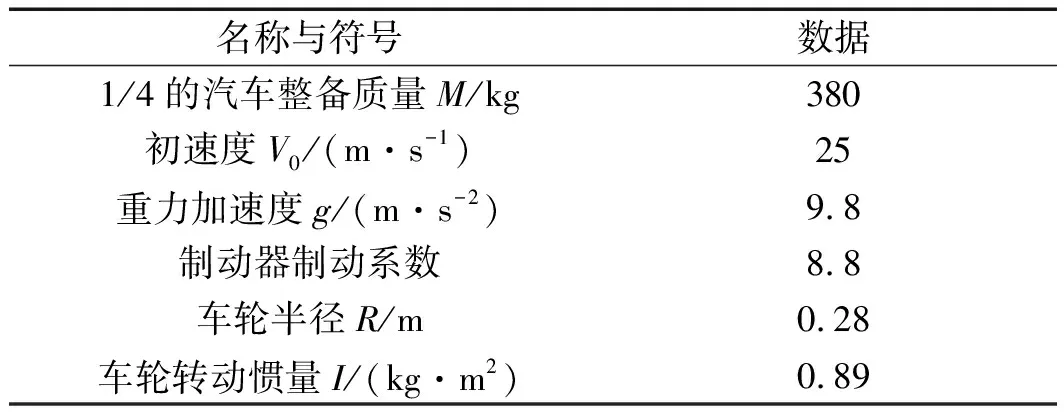
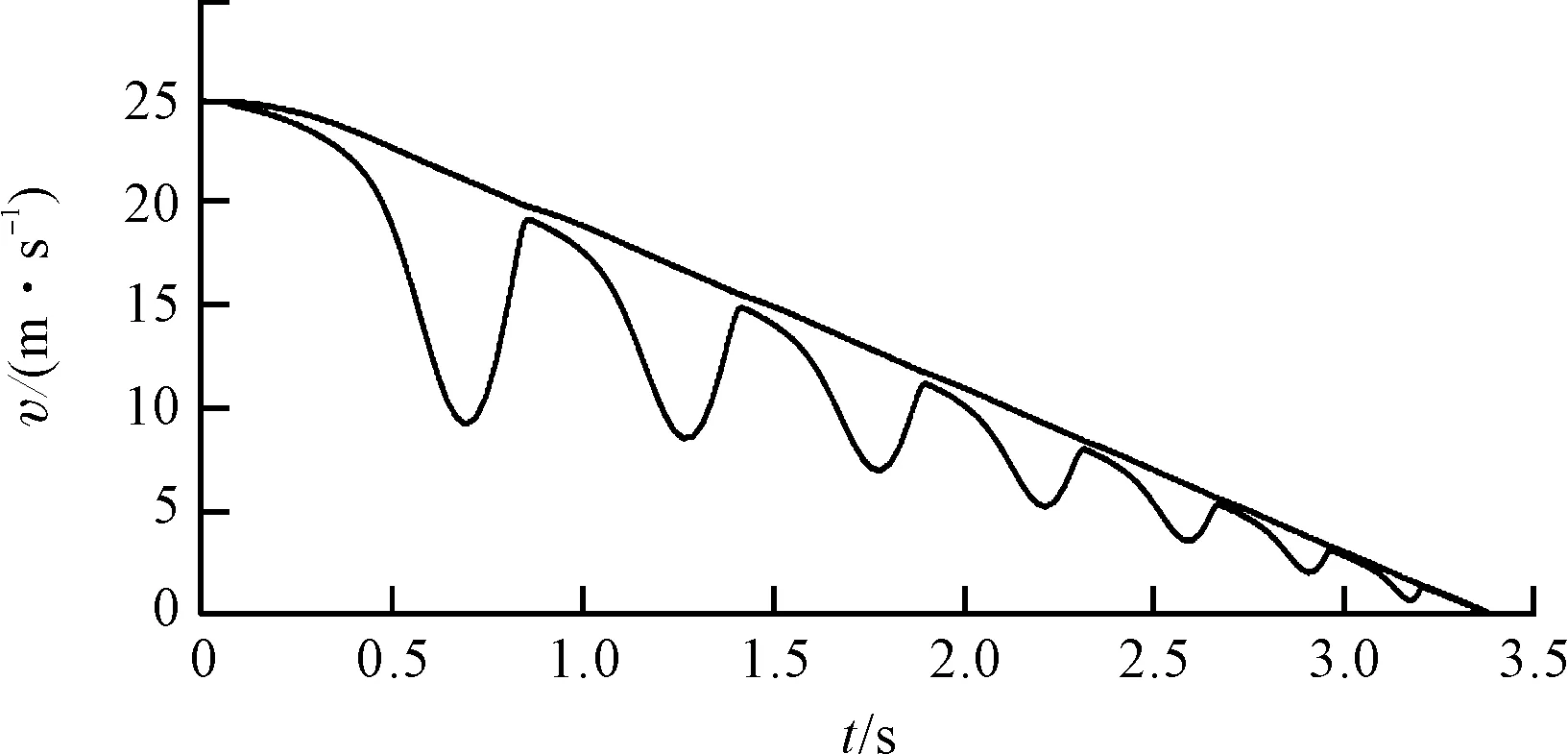
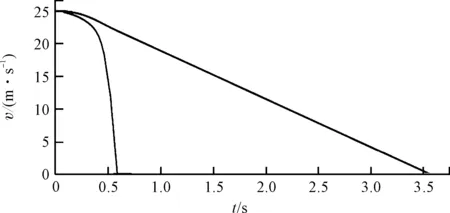
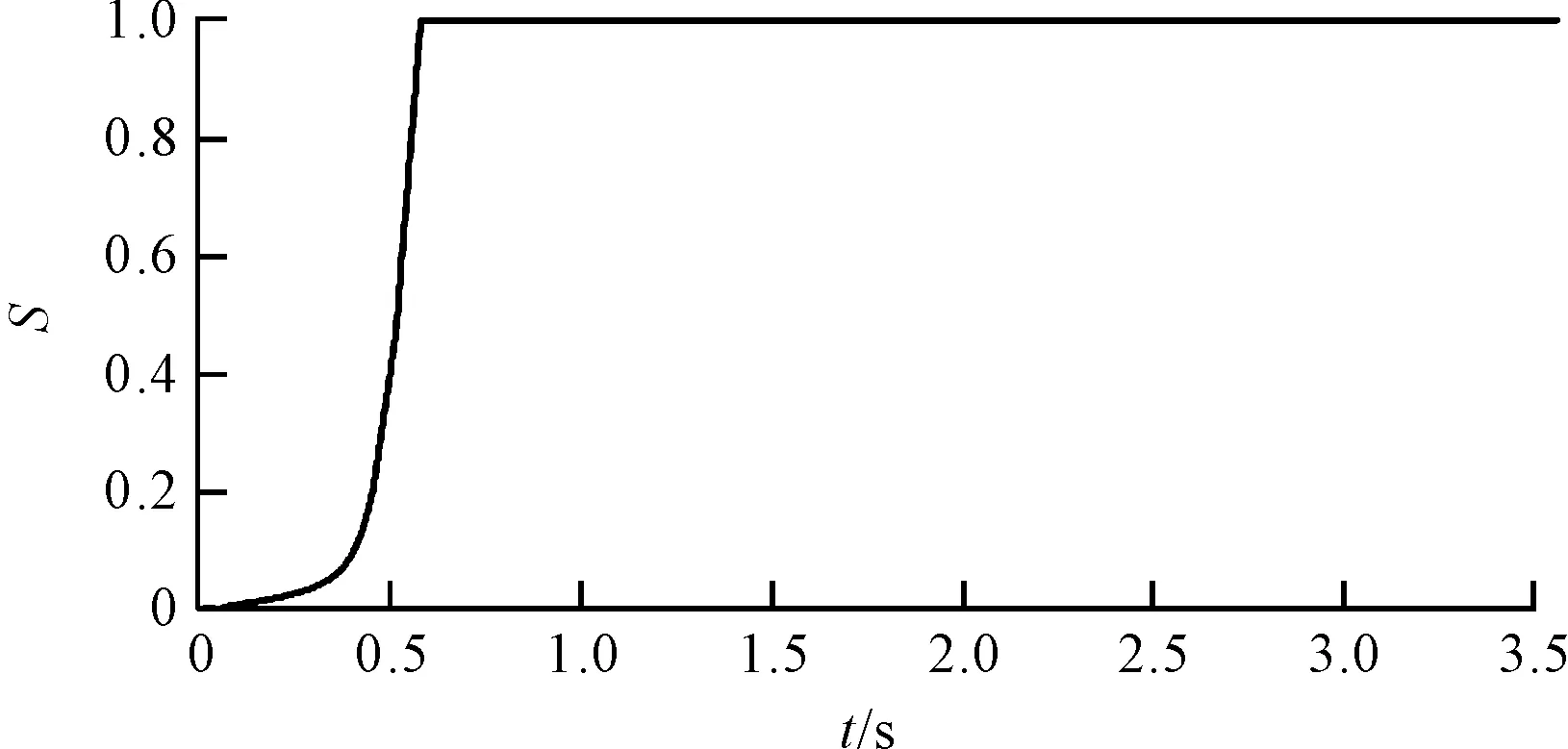
當車輪純滾動時,υ=ωR,s=0;當車輪抱死純滑動時,ωR=0,s=100%;當車輪邊滾邊滑時,υ>ωR,0 本文的汽車ABS的控制系統主要是PID控制器,利用測得的汽車速度、車輪轉速信息算出各輪胎實際滑移率,再將其與期望滑移率進行比較得出差值,作為控制器的輸入量。制動器制動壓力的大小調節就依賴于PID控制器的輸出量。 PID控制器Ki、Kp、Kd這3個參數的設置,本文采用PID Controller模塊不斷調節這3個參數并驗證,直至控制系統響應速度快、穩定性好,最終使得實際滑移率維持在理想的數值范圍內,使得汽車保持較好的制動工況。 其數學模型為[12]: Δ(t)=M(t)-R(t) (9) (10) 式中:Δ(t)—控制量偏差;M(t)—給定目標值;R(t)—實際控制輸出量。Kp—比例系數;Kd—微分系數;Ti—積分時間常數;Td—微分時間常數;u0—控制常量,即t=0時的輸出量,對絕大多數系統都有u0=0[13]。 在有無ABS的情況下,利用Simulink分別進行仿真。汽車ABS仿真模型如圖1所示。 圖1 汽車ABS仿真模型 本文采用的汽車模型參數如表1所示。 表1 汽車模型參數 當PID控制器輸入端的增益模塊K=1時,進行有PID控制的ABS制動仿真,其制動距離為45.16 m。有ABS的車速與輪速的變化曲線如圖2所示。 圖2 車速與輪速變化曲線 由圖2可知:輪速線一直處于車速線下方并靠近車速線。根據滑移率公式(8)可推知滑移率數值較小,滑移率控制效果較好。 滑移率變化曲線如圖3所示。 圖3 滑移率變化曲線 由圖3可知:滑移率始終維持在0.2的數值附近波動,說明了本文的PID控制器發揮了較好的調節作用。 當PID控制器輸入端的增益模塊K=0時,進行無PID控制的制動仿真。其制動距離為46.98 m。 無ABS的車速與輪速的變化曲線如圖4所示。 圖4 無ABS的車速與輪速變化曲線 無ABS的滑移率變化曲線如圖5所示。 圖5 無ABS的滑移率變化曲線 兩種制動工況的仿真數據對照表如表2所示。 表2 兩種制動工況下的仿真數據對照表 從表2可以看出: (1)安裝ABS制動時,在開始制動后滑移率不斷調節,在時間為0.317 s時達到最大值0.262,并且隨著控制器的不斷調節,滑移率波動的幅度越來越小,越來越趨于穩定,趨于設定的理想滑移率數值,沒有出現純滑動、車輪抱死的現象,說明在制動特別是緊急制動時,ABS一定程度上保證了汽車的方向操縱性和制動性能; (2)未安裝ABS制動時,汽車車輪在0.606 s時完全抱死,此時汽車基本失去轉向能力,基本失去了對車子的控制。 本文利用Matlab Simulink板塊搭建了干燥路面下汽車制動系統的相關模型,并進行了仿真測試;通過對比是否安裝ABS的汽車制動情況可知:ABS在汽車緊急制動時可以極大地減小或者避免車輪抱死滑動,使得汽車在制動時的轉向操縱性、方向穩定性得到較大改善。 本文下一步還將模擬泥濘、濕滑、積雪等道路條件下的制動工況,以及不同制動速度下的制動情況。1.5 基于滑移率的PID控制器模型
2 汽車ABS仿真及結果分析
2.1 汽車ABS仿真模型
2.2 有ABS的汽車制動仿真
2.3 無ABS的汽車制動仿真
2.4 仿真結果分析

3 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
