電動沙發機械結構的運動仿真及優化*
2019-01-02 02:20:58謝重,謝巍,楊杰
機電工程 2018年12期
關鍵詞:優化
謝 重,謝 巍,楊 杰
(臺州職業技術學院,浙江 臺州 318000)
0 引 言
功能沙發近年來在中國沙發市場發展迅速,城市中等收入水平者在家具購買時,會更多地選擇舒適度好的功能沙發[1]。作為休閑時首選的沙發座具,如果設計不合理,不僅起不到放松、緩解疲勞的效果,還將導致腰肌勞損、累積性創傷疾患等多種疾病[2-3]。
國內外許多學者針對不同的功能座椅進行過力學性能分析、運動功能分析及其結構參數優化等方面的研究。其中:謝巍[4]應用ADAMS對VR動感椅的結構進行了動力學仿真,分析了其運動過程中電動缸所受的扭矩;蔡歡[5]使用ADAMS軟件對多功能辦公休閑椅進行了運動分析,使用ANSYS軟件對座椅進行了強度與疲勞實驗分析;謝巍[6]使用ADAMS對辦公椅聯動機構進行了參數化建模,對連桿參數進行優化設計,實現了辦公椅靠背在聯動過程中的‘零搓背’;LI Rui-qin[7]對雙自由度七桿機構進行工作空間分析,將其拆分為鉸鏈五桿機構和RPP型二級阿蘇爾桿組形式,分析了兩者耦合點的工作空間和輸出曲線間的特性關系,通過控制改變結構參數來達到給定的輸出;劉波[8]對混合驅動的九連桿壓力機進行了機構構型綜合分析,利用復數矢量法建立了機構的運動學模型,并導出了九桿機構的動力學模型。
本文將針對一款多功能電動沙發,在ADAMS中進行機械裝置的運動仿真分析,初步驗證整體機械裝置的運動參數正確性;運用平面桿系運動學理論,建立電動沙發的平面連桿系機構的運動理論模型,求解出擱腳板的角速度和質心運動速度曲線,以此驗證ADAMS運動仿真的正確性;采用Matlab中的fmincon優化工具箱對目標函數進行優化求解,優化平面連桿系的參數。
1 電動沙發機械結構
電動沙發分坐姿、休閑姿和躺姿3種狀態模式,由于電動沙發的機械結構模型是對稱的,筆者采用其一半機械結構的機構簡圖。
電動沙發的3種姿態的模型如圖1所示。
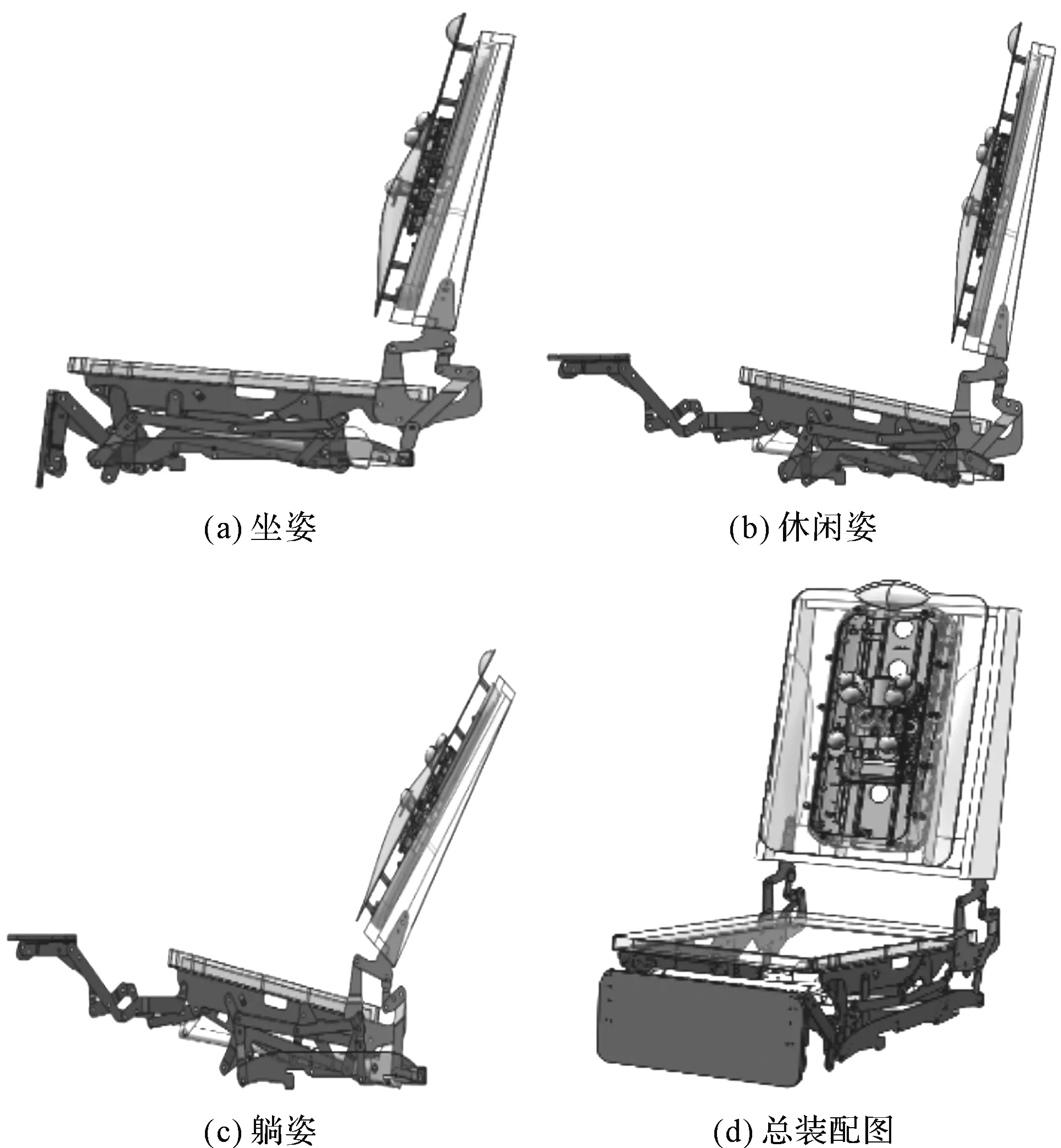
圖1 電動沙發整機三維模型
電動沙發機械裝置的姿態變化過程分析,如圖2所示。
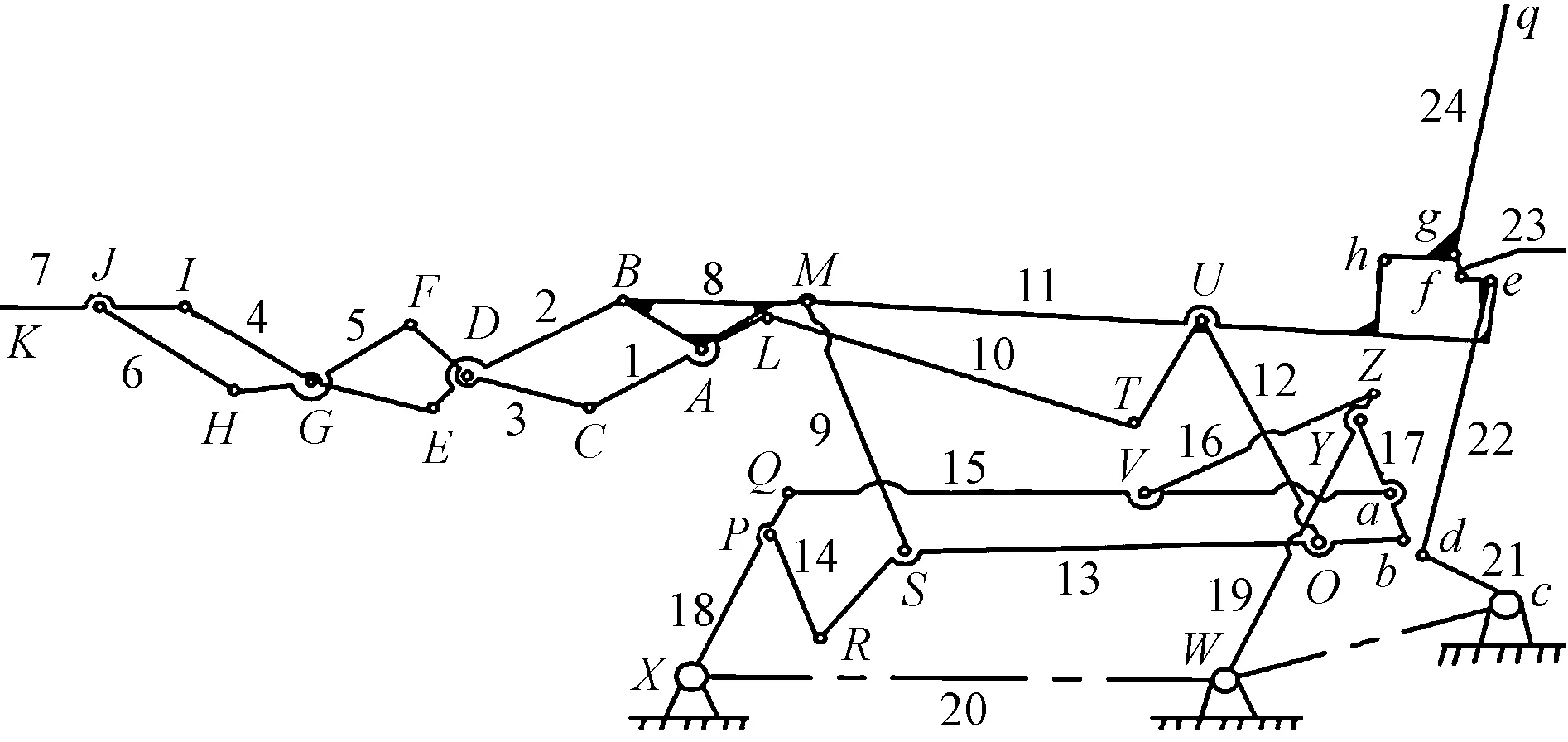
圖2 電動沙發裝置機構簡圖1,10—連接桿;2,6—擱腳桿機構;7—擱腳板;9,12,13—休閑姿四邊形機構桿;11—座板;14,19—躺姿四邊形機構桿;20—機架;21,23—靠背機構桿;24—靠背板
在坐姿到休閑姿的變換過程中實現擱腳板的伸展和坐板的前移,即在電動推桿12的作用下,帶動連接桿10來驅動連接桿1,從而使擱腳桿機構運動實現擱腳板7伸展,同時在電動推桿12的驅動下使得與座板11連接的四邊形機構MSOU運動,從而實現座板11前移。休閑姿到躺姿的變換過程中實現靠背后仰,即在休閑姿的基礎上電動推桿12繼續驅動,帶動四邊形機構QXWZ運動,從而使座板11與擱腳機構做整體的遷移,最終由座板11的前移使得靠背板24后仰。
2 電動沙發的運動仿真分析及理論分析
2.1 仿真模型的建立
電動沙發裝置的機械結構為對稱的平面桿系機構,本研究對其機械結構取1/2模型進行分析。將簡化后模型導入ADAMS,添加材料屬性,設置好單位及重力加速度。同時,為描述構件間的相對運動,需要根據實際情況對電動沙發在仿真時添加相應的轉動副、移動副和固定約束。
電動沙發驅動件為電動推桿,其啟停時間極短,運動平穩。筆者選定電動推桿的運行速度為22 mm/s,電動推桿的加減速時間一般為0.5 s[9]。中間時段電動推桿保持勻速運動。電動沙發運動的兩個階段如表1所示。
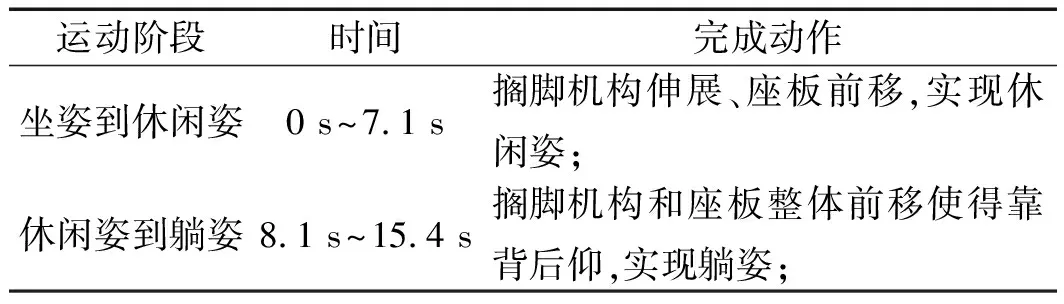
表1 仿真運動階段分析
參照QB/T 4191—2011測試加載要求,可知測試加載的形式,其中,F2為77 kg,F3為24.5 kg,由于是對稱模型,加載數值是實際模型中的一半。
測試加載示意圖如圖3所示。
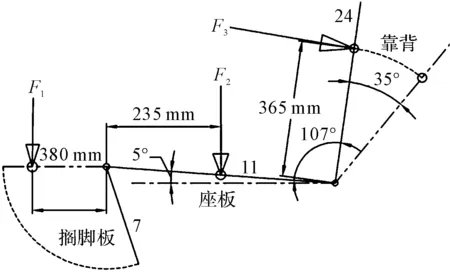
圖3 測試加載示意圖
2.2 仿真結果及分析
電動沙發在位姿變化的運動過程中,主要研究擱腳板、座板和靠背板的平穩性問題。本研究在ADAMS軟件中進行機構的運動仿真后,提取出擱腳板、靠背板和座板的角速度和速度參數,如圖(4,5)所示。
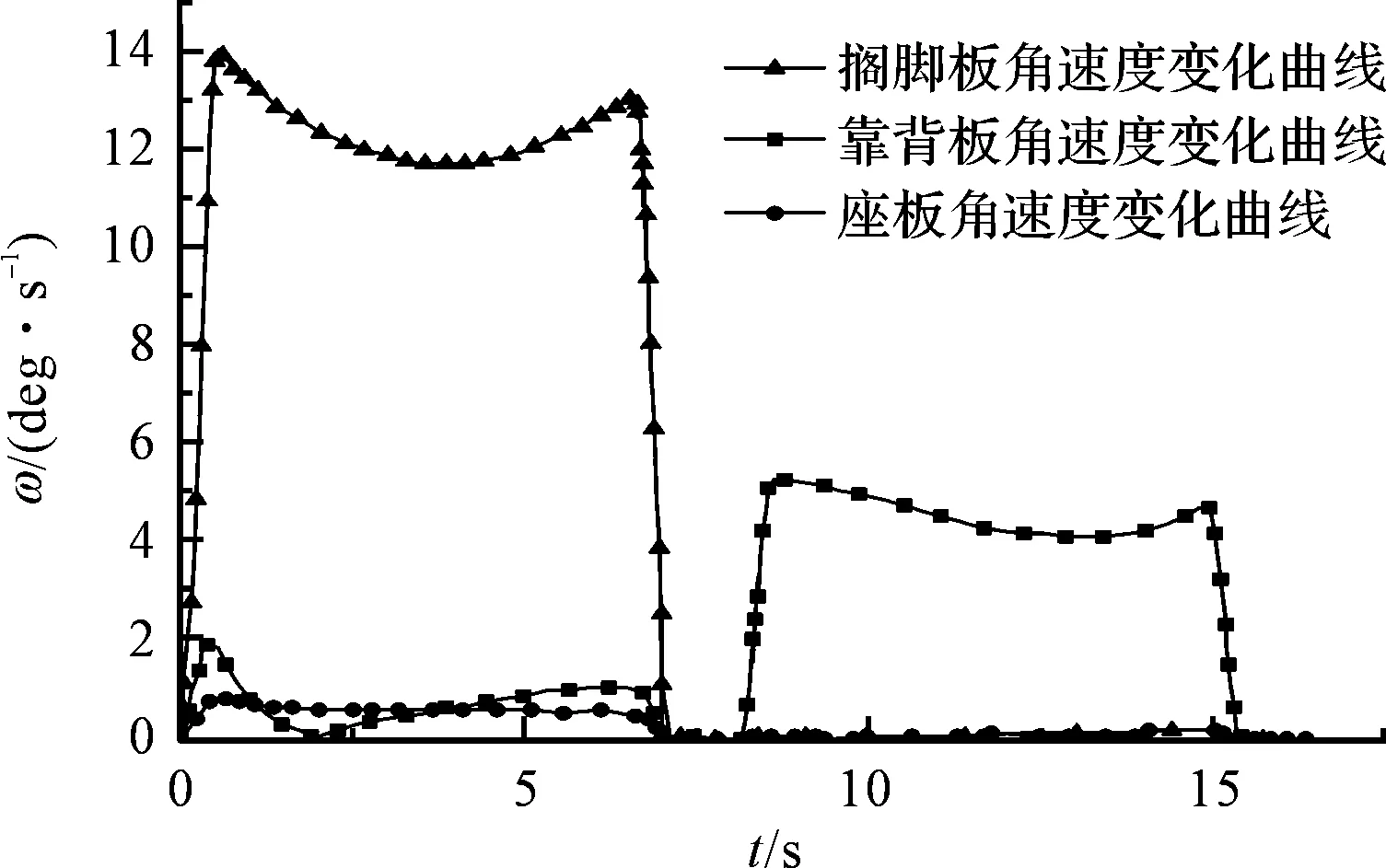
圖4 擱腳板、座板及靠背板角速度曲線
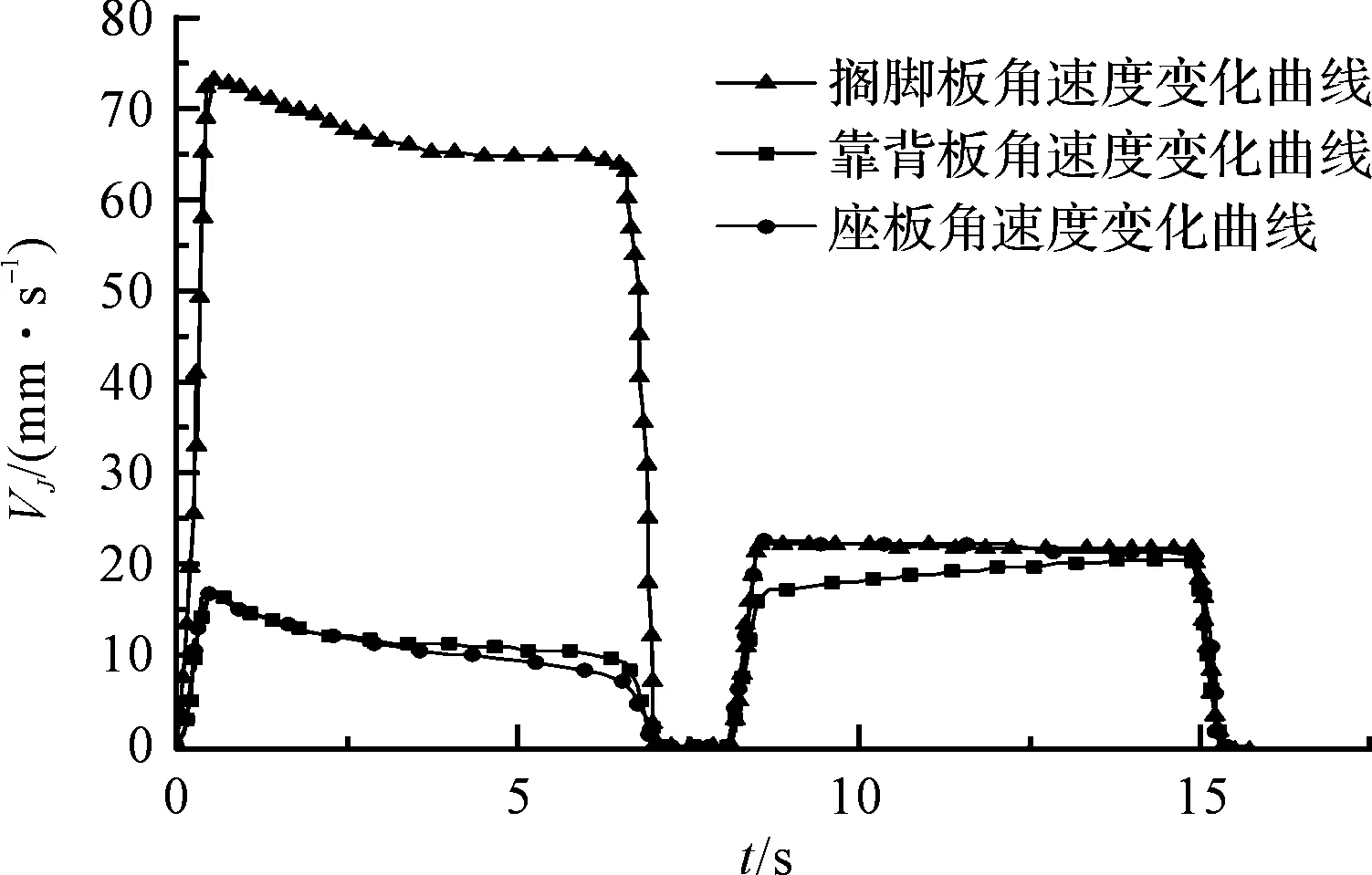
圖5 擱腳板、座板及靠背板質心速度曲線
擱腳板從坐姿到休閑姿的過程中,角速度的變化最大,其變動幅度為3.5 deg/s;靠背板在休閑姿到躺姿的過程中,角速度變化值為1.5 deg/s;座板在整個運動過程中的角速度比較平穩。擱腳板從坐姿變換到休閑姿的過程中,擱腳板質心速度的變化最大,其變動幅度為11 deg/s。
在位姿變化過程中,擱腳板的速度和角速度變化幅度較大,特別是在坐姿向休閑姿轉換的過程中,如表2所示。

表2 電動沙發重要部件運動參數的變動幅度
擱腳板的運動參數的變化對整個機構的運動平穩性和電動沙發的舒適性影響重大,因此需要對角速度和質心速度變動幅度較大的擱腳板部件進行結構參數優化。
2.3 休閑姿實現的運動分析及求解
由上述仿真可知:擱腳機構在由坐姿向休閑姿變化的過程中不平穩性嚴重,為了驗證仿真的正確性,本研究對簡化后的休閑姿機構進行理論分析及求解。通過去除在坐姿向休閑姿變化的過程中不參與運動的桿件和靠背模塊得到機構簡圖,如圖6所示。
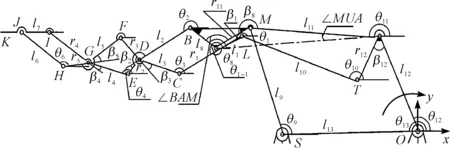
圖6 簡化后的休閑姿機構簡圖
其中桿件參數含義如表3所示。
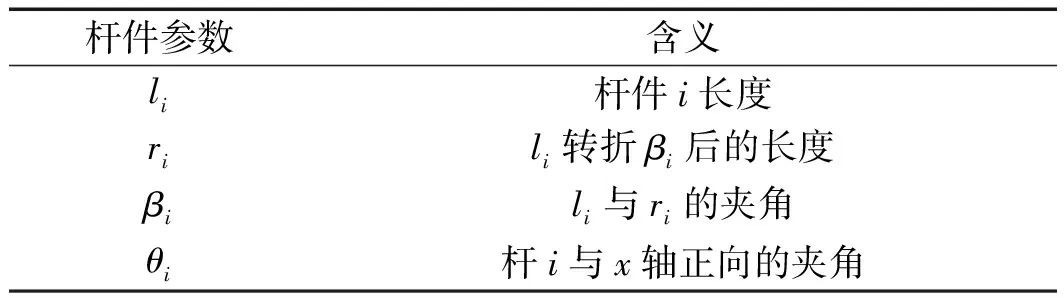
表3 簡化后的機構簡圖中的桿件參數含義
以O為原點建立坐xoy標系,作封閉矢量多邊形,建立矢量方程。該機構獨立封閉環的個數為[10]:
l=P-N+1=5
(1)
式中:l—獨立封閉形個數;P—機構的運動副個數;N—機構的構件總數。
各個封閉環的環矢量方程為:
l12cosθ12+l11cosθ11=l13cosθ13+l9cosθ9
(2)
l12sinθ12+l11sinθ11=l13sinθ13+l9sinθ9
(3)
r12sin(π+θ12-β12)+l10sinθ10+
l1sinθ1=lAUsin(θ11+∠MUA)
(4)
r12cos(π+θ12-β12)+l10cosθ10+
l1cosθ1=lAUcos(θ11+∠MUA)
(5)
r1cos(θ1+β1)+l3cosθ3=l8cos(β8+
∠BAM+θ11-2π)+l2cosθ2
(6)
r1sin(θ1+β1)+l3sinθ3=l8sin(β8+
∠BAM+θ11-2π)+l2sinθ2
(7)
r2cos(θ2+β2)+l4cosθ4=l5cosθ5+r3cos(θ3-β3)
(8)
r2sin(θ2+β2)+l4sinθ4=l5sinθ5+r3sin(θ3-β3)
(9)
r4cos(θ4-β4)+l7cosθ7=r5cos(θ5-β5)+l6cosθ6
(10)
r4sin(θ4-β4)+l7sinθ7=r5sin(θ5-β5)+l6sinθ6
(11)
Jv=b
(12)
其中:
于是有:
(13)
由此可求得各桿的角速度表達式。因為機構的各桿長參數已知,當各桿件相應的位置角參數θ2、θ3、θ4、θ5、θ6、θ7求解后,那么各桿件在運動過程中的位置參數也就相應的得到了求解。由圖6可知,通過解析法可求得擱腳板的質心在X和Y方向運動的表達式:
X7=-[l12cosθ12+r12cos(π+θ12-β12)+l10cosθ10+
r1cos(θ1+β1)+l1cosθ1+r3cos(θ3-β3)+l3cosθ3+
l5cosθ5+r5cos(θ5-β5)+l6cosθ6]
(14)
Y7=l12sinθ12+r12sin(π+θ12-β12)+l10sinθ10+
r1sin(θ1+β1)+l1sinθ1+r3sin(θ3-β3)+l3sinθ3+
l5sinθ5+r5sin(θ5-β5)+l6sinθ6
(15)
結合式(14,15),可求得擱腳板質心速度v7為:
(16)
由此求得了擱腳板角速度ω7和擱腳板質心速度v7關于時間的理論方程。電動沙發結構參數的初始值數據如表4所示。
本研究將其輸入到Matlab中,畫出相應曲線圖,進一步地與ADAMS輸出的擱腳板參數運動曲線進行對比分析,如圖7所示。
在擱腳板角速度和質心速度曲線的仿真值與理論值的比較過程中,擱腳機構在由坐姿向休閑姿變化時,ADAMS仿真中得出的擱腳板角速度和質心速度都與Matlab計算出的理論值曲線基本相吻合,誤差在5%內。因此,本研究通過對平面連桿機構的運動參數進行計算求解,驗證了ADAMS仿真中擱腳板運動的正確性。

表4 桿件及結構角的初始值
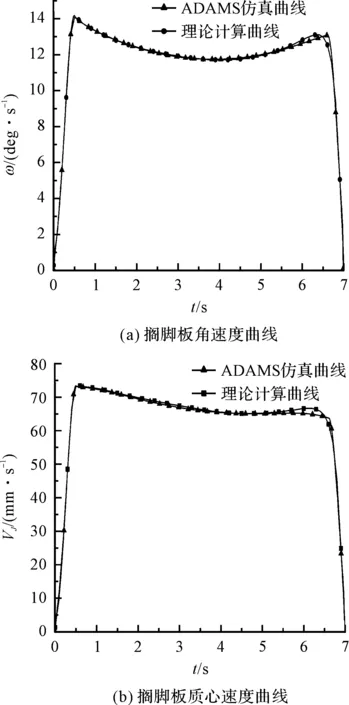
圖7 擱腳板角速度和質心速度曲線仿真值與理論值比較
3 結構參數優化
3.1 目標函數的建立
由于擱腳板在姿態變化過程中角速度和質心速度變化幅度較大而影響機構運動的平穩性,本研究以擱腳板運動平穩性為目標,建立目標函數。首先采用擱腳板質心速度的方差來建立目標函數[11]:
(17)

同理,可建立擱腳板角速度的表達式:
(18)
3.2 優化設計變量的選取
影響目標函數的參數量有桿件的長度li、ri及兩者之間的結構角βi,由于結構角變化將導致擱腳機構伸展時結構發生干涉,結構角βi不作為優化設計參數。對變量進行靈敏度分析后,取對目標函數f1(x)與f2(x)的影響程度都較大的變量作為最終的設計變量,最終選取:
[X1,X2,X3,X4,X5]=[l4,l6,r3,r4,r5]
3.3 約束條件
(1)鎖緊長度L:如圖6所示,當電動沙發的姿態為坐姿時,擱腳板前端面到擱腳板與座板的連接點的距離L為:
55≤L=XJ0-XB0≤80
(19)
式中:XB0—坐姿時B點橫坐標;XJ0—坐姿時J點的橫坐標。
(2)根據人機工程學要求[12],為了增加休閑姿的舒適性,伸展到位的擱腳板質心點J距離初始狀態的J0的水平距離至少要達到440 mm才能在休閑姿時對小腿有很好的支撐作用:
440≤ΔXJ=XJt-XJ0≤465
(20)
式中:XJ0—初始坐姿J點X方向的坐標值;XJt—休閑姿J點X方向的坐標值。
(3)擱腳伸展到位時運動角度要求:
85°≤|θ7t-θ70|≤95°
(21)
式中:θ70—初始坐姿θ7的角度;θ7t—休閑姿時θ7的角度。
(4)休閑姿擱腳板到座板的高度差,轉換為兩鉸接點的Y方向的距離,可表示為:
55≤YIt-YBt≤85
(22)
式中:YIt—休閑姿I點的縱坐標值;YBt—休閑姿B點的縱坐標值。
(5)桿長約束條件:
50≤l4≤70、149≤l6≤171、42≤r3≤63
138≤r4≤161.5、40≤r5≤56
(22)
4 Matlab優化結果
采用Matlab中的fmincon優化工具箱可以解決帶非線性約束的優化問題[13]。用加權系數法可以將多目標問題轉化為單個目標優化問題,取加權系數為0.6和0.4,可得到總的目標函數為:
f(x)=0.6f1(x)+0.4f2(x)
(23)
本研究將目標函數及約束條件在Matlab中進行編程,設計變量的上下限即為桿長約束條件,通過調用優化工具箱進行迭代運算得到最終的優化解[14-15],優化后的參數如表5所示。

表5 優化后參數值
通過Matlab優化工具箱求解目標函數,將得出的優化參數代入Matlab的參數模型中,可輸出得到擱腳板角速度與質心速度曲線。電動沙發結構參數優化前后擱腳板角速度和質心速度對比曲線如圖8所示。

圖8 優化前后擱腳板角速度和質心速度對比曲線
在實現機構由坐姿到休閑姿的轉變過程中,優化前擱腳板質心速度及其角速度最大變動幅度分別為11 mm/s和3.5 deg/s,優化后兩者最大變動幅度為4 mm/s和1.5 deg/s,由此,通過整個結構參數優化過程使得擱腳板在姿態變化過程中的速度平穩性得到了提升,提高了電動沙發的舒適性。
5 結束語
本文對電動沙發整機模型進行運動仿真分析,引出了休閑姿實現的過程中擱腳板角速度及其質心速度不平穩問題,采用復雜平面桿系運動學理論,對實現休閑位姿的復雜桿系建立理論模型,并求得其速度、角速度表達式;同時借助Matlab優化工具箱,以擱腳板的角速度和質心速度作為優化目標,求解出對目標函數影響大的桿長參數的最優解。
結果表明:連桿參數優化后的擱腳機構在姿態轉換過程中速度的平穩性得到了增強,提高了電動沙發的舒適性。本研究可為同類型機構的設計優化提供參考。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
