六自由度數字化導板定位系統的運動分析及仿真研究*
2019-01-02 02:20:58萬光義程康杰劉云峰姜獻峰
機電工程 2018年12期
關鍵詞:支架
萬光義,程康杰,劉云峰,姜獻峰,彭 偉
(浙江工業大學 機械工程學院,浙江 杭州 310014)
0 引 言
最近幾年興起的介入治療手術方式,能夠最大限度地減少外科手術的創面,減輕患者的痛苦,減少手術時間,因此在實際臨床操作中得到廣泛的應用[1]。介入治療是微創手術的一種,伴隨著3D打印技術的成熟在臨床中的應用迅速擴大[2]。由于頜面部血管神經較多,對該部位的手術精度要求也極其嚴格,頜面部患病的主要治療方式是在數字化導板的輔助下進行介入治療。
要針對頜面部介入治療導板定位進行研究,在頜面部的介入治療中需要對病患區域進行插針,然后進行粒子植入等一系列操作[3]。沒有使用導板定位系統以前,3D打印的導板在病患區域的定位主要是依靠頜面部軟組織特征進行定位或者通過患者牙齒咬合導板進行定位,這兩種定位方式有極大的缺陷[4]。因此,介入治療中的3D打印導板定位難、定位精度低的問題亟待解決。
傳統的頜面部輔助定位系統主要是立體定向裝置,該裝置結合數字化影像設備對頜面部局部進行定位,但是缺點是系統操作復雜,實際使用過程中病人自身的移動會導致定位誤差較大[5]。頜面部功能區較多且患者對于外觀美學也有一定的要求,因此操作需要精細化[6]。2012年邵海峰[7]在針對上頜骨骨折問題定位難的問題,開發了應用上頜骨前鼻棘點三維定位支架裝置。該裝置參照立體定向儀,能準確地定位上頜骨骨折前的實際位置。2013年王棟等人[8]設計了基于模塊化的便攜式立體定位系統,定位精度可達2 mm,具有較高的實用價值。但是受限于操作場地和手術流程等,在實際使用體驗上仍然和固定式定位系統差別不大。
本研究針對傳統導板定位精度低、定位儀器笨重、操作復雜等問題,本研究擬針對設計的一種六自由度導板定位系統進行可行性分析。
1 結構的設計
通常要完全確定工件位置,就需要約束工件的6個自由度,一般采用6個支撐點來限制工件的位置[9]。本文將數字化導板視為理想剛體,根據剛體運動學原理,要想使工件能夠繞3個坐標軸(X,Y,Z)旋轉,而且可以沿著3個坐標軸(X,Y,Z)移動,就要滿足6個自由度。
根據患者的介入治療需求,顱頜面的立體導板定位系統總體結構設計如圖1所示。
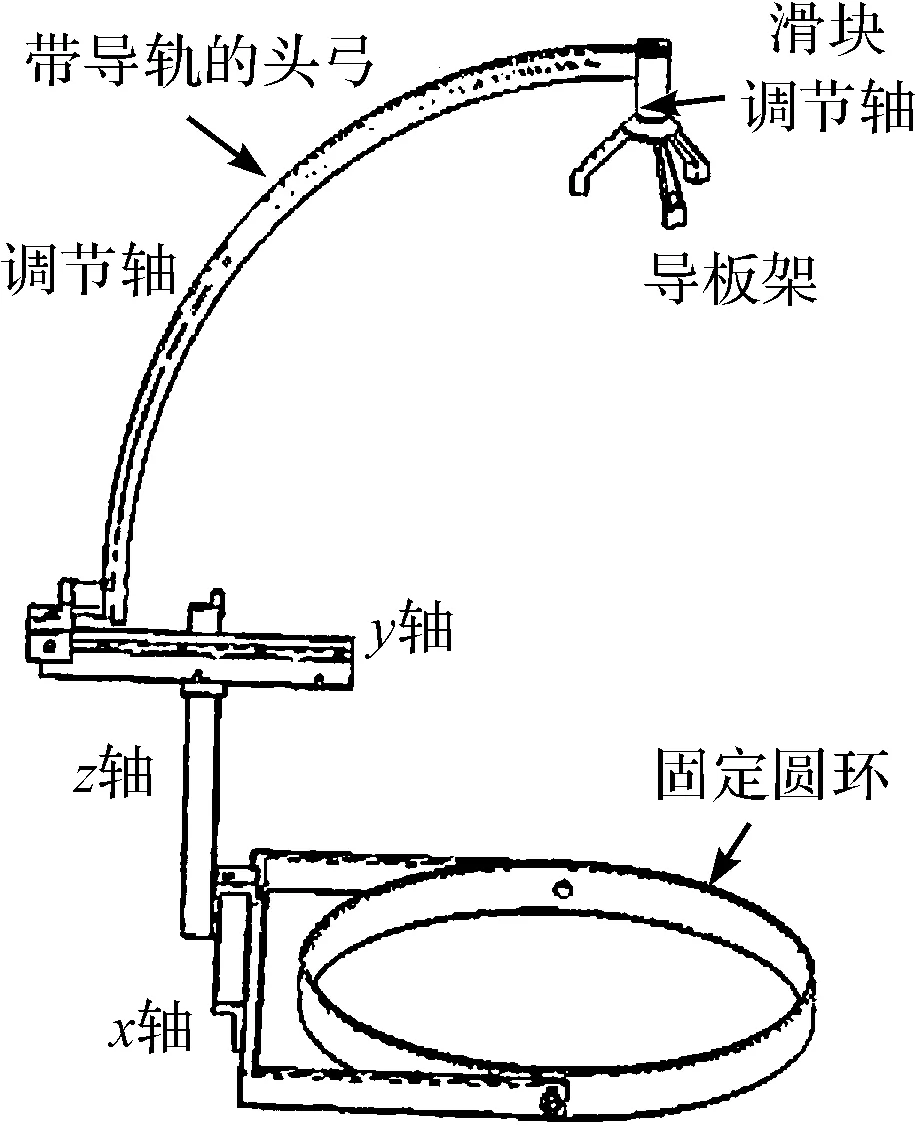
圖1 數字化導板定位系統
立體導板定位系統的設計就按照最基本的6自由度式,并在結構上進行相應的設計和組裝。圖1中支架主要由固定頭環、調節軸、頭弓、導板架四大部分構成。固定頭環套在患者頭上,通過孔固定釘在頭上定位,為防止固定釘造成頭皮的二次傷害,可選擇同樣的3個剛性板子墊在固定環上螺孔內側靠近頭皮的地方,同時固定釘上可標刻度,在第二次佩戴時候根據第一次刻度和佩戴位置進行固定擰緊。調節軸分為兩大部分:第一部分包括x軸、y軸、z軸方向上的導軌和固定板,負責水平和豎直方向上的移動,標有-200 mm~200 mm的刻度;第二部分為可繞x軸、y軸、z軸3個方向上的旋轉軸,其中繞x軸方向上可操作旋轉設計為滑塊沿帶導軌的頭弓移動。這樣既可以保證足夠的自由度,也可以方便的在整個病灶區域調節。在帶導軌的頭弓上標有0°~90°的刻度,繞y軸旋轉的調節軸標有0°~180°的刻度,繞z軸方向旋轉的調節軸標有0°~360°的刻度。頭弓主要設計為貼近頜面部的弧形,并且負責承受導板支架和后期安裝導板后的壓力,需要具有一定的剛度。導板架設計為三爪手狀,其中有可以安裝固定導板的3個螺孔,這里將3個螺孔設計為軸向相互平行且等間距,便于調節導板進行配對的計算。
導板定位系統行使的主要功能是:將整個系統固定在頭部,在導板架上安裝導板,通過調節該系統使得導板到達理想的位置。在運動學上通過建立不同的坐標系確定導板移動前后的坐標,根據羅德里格旋轉公式的解法求出定位系統上導板移動前后的旋轉角度和平移量即可[10]。
2 運動學分析
定位支架正運動學分析即為給定某一輸入坐標和旋轉角度數值,得到對應的一組末端執行機構的姿態[11]。理論上定位支架系統可以視作由一系列關節連接起來的剛性連桿組成。筆者在每個剛性連桿上構建固聯坐標系,這樣可以準確地描述一個剛性桿與下一個剛性桿之間的坐標關系。因此需要采用一種合適的方法來描述相鄰連桿之間的坐標方向和參數,常用的是D-H參數法[12]。根據需求,本研究一共建立與定位系統各個移動關節相對應的7個坐標系,如圖2所示。
本研究用齊次矩陣描述相鄰構建之間的相對平移和旋轉的齊次坐標變換。用i-1Hi表示從坐標系O-Xi-1Yi-1Zi-1到相鄰坐標系O-XiYiZi的轉換關系。根據圖2中坐標系的關系由D-H法可以得到運動學正解為:
(1)
式中:li—平移量,i=1,2,3;θi—旋轉量,i=1,2,3;s—正弦sin,c—余弦cos,下同。
據悉,此次談話主要內容涉及重點宣貫公司系統關于深入踐行監督執紀“四種形態”規范化試點工作精神,提醒被約談人積極說清存在問題,對在這次試點工作中能夠主動向組織說清問題的,在政策允許范圍內給予出路和機會;對遵紀守法、履行好“一崗雙責”、管控好廉潔風險提出建議和要求;結合當前形勢、所在崗位、業務領域,分析身邊存在哪些廉潔風險?對照本業務領域監督執紀問責業務指導書,查找是否存在觸“黃線”、踩“紅線”、越“底線”的情況;對做好自身、所在崗位及業務領域的廉潔風險管控有哪些思考和措施?對本單位反腐倡廉建設有什么好的意見或建議?談話對象在遵紀守法與廉潔自律方面有沒有需要向組織說明的情況?
上式僅與調節端給定調節的數值li,θi(i=1,2,3)有關;末端的位置表達式即P(x,y,z),可表示為:
(2)
本研究將坐標系{O0}先繞著Z軸旋轉γ角度,然后再繞著Y軸旋轉β角度,最后繞著X軸旋轉α角度,即構成一組Z-Y-X歐拉角。得到的末端姿態矩陣為:
(3)
式中:di—支架系統上各個桿件長度(為定位系統設計參數的固定值),i=1,2,3,4,5。
3 機構仿真分析
3.1 靜力學仿真
在設計圖中的定位系統結構圖中可知,該設計中頭弓這個零件起著關鍵性的作用,該部分頭弓固定在頭環一側,要承受導板架和導板的所有重量,所以可把此部分視為最薄弱環節。其結構受力狀況簡化為懸臂梁模型。因此為了保證在使用過程中該部分的變形量可控,本研究對頭弓的受力狀態和形變狀態進行了有限元分析。
本研究在ABAQUS軟件中進行了有限元分析,得出應力和應變圖如圖(3,4)所示。
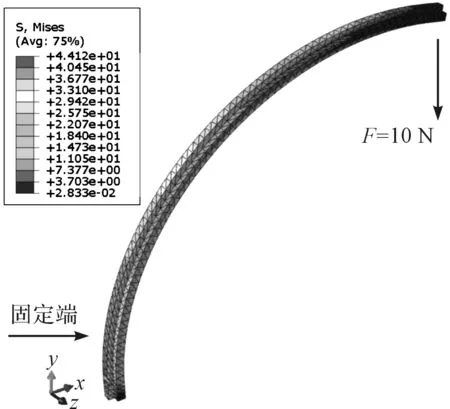
圖3 應力圖
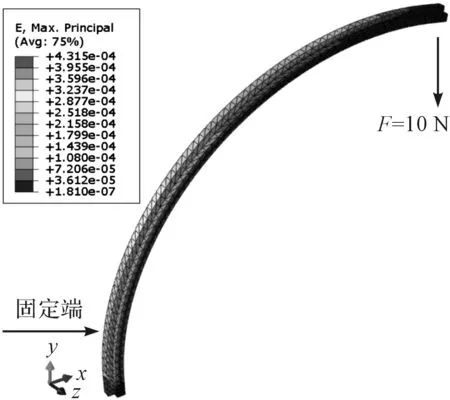
圖4 應變圖
根據材料的輕便性和生物相容性等需求,在實際的臨床使用中定位支架訂做材料可選用鈦六鋁四釩,彈性模量為113 GPa,泊松比為0.3,密度為4.428 g/cm3。對其進行承載力分析可知,在頂端螺孔連接處要承受導板架和導板的質量,根據實際需要得出最大載荷不超過10 N。從上圖中可以看出最大應力值為4.412e+01 N/m2,最大應變為4.315e-04 mm,均小于材料的許用應力和應變。由此可見,該頭弓滿足應有的強度和應變需求。
3.2 工作空間仿真
根據正運動學分析的末端姿態矩陣,筆者對頜面外科定位支架末端執行器(即導板架)進行工作空間仿真。仿真結果為定位支架系統工作的空間,如圖5所示。
本研究可以覆蓋約為200×250×400 mm3的立體空間。在實際臨床應用中,固定支架定位系統在整個患病區域一側的頭部,完全滿足實際手術的運動空間需求。
在Matlab中仿真圖為立體點云模型,為了更直觀地展示定位支架末端導板架的工作空間,工作空間的三視圖如圖6所示。
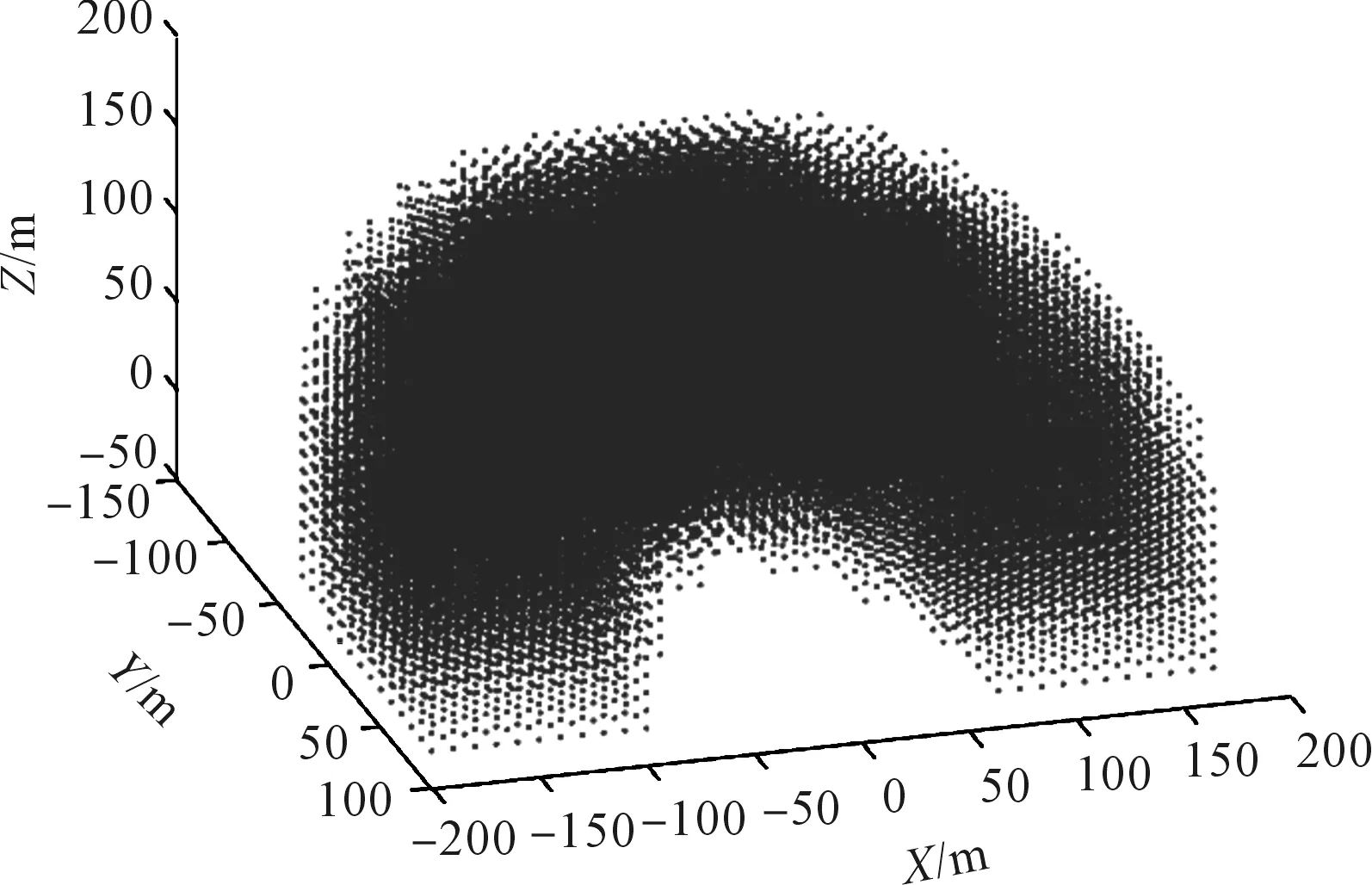
圖5 定位系統工作空間仿真圖
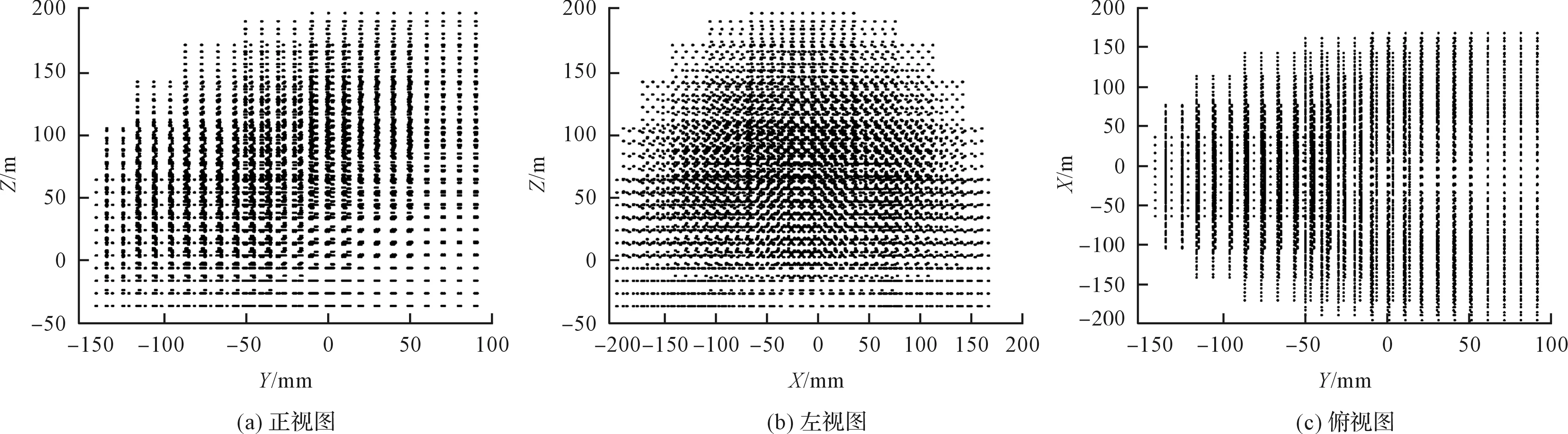
圖6 立體定位系統工作空間三視圖
當定位系統固定在頜面部左側區域時工作空間符合實際操作部位的需求。
3.3 實驗結果分析
定位系統誤差測試實驗平臺中,支架固定在一個3D打印的頭骨模型上,所用定位支架為該實驗裝置。在實驗時可以調節定位系統的導板架,從而讓導板架上3個特征點與理想位置的特征點進行匹配。
導板定位系統和頭骨模型如圖7所示。
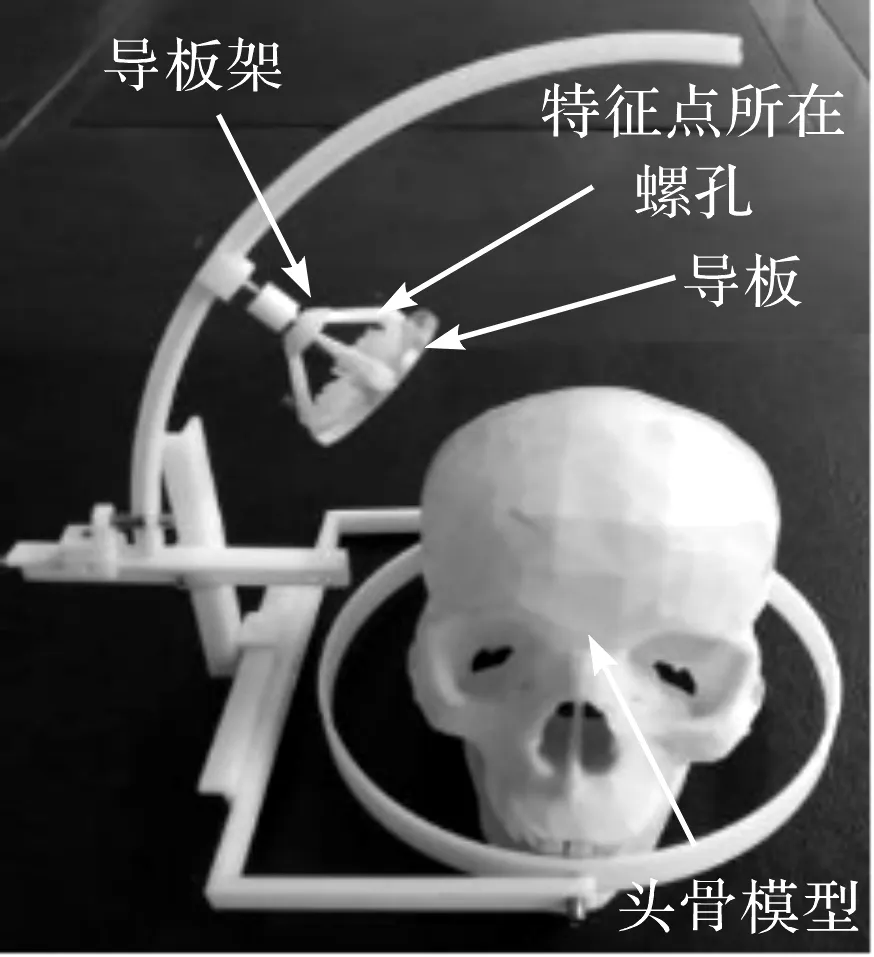
圖7 導板定位系統和頭骨模型
驗證數字化定位系統的定位精度主要是驗證其絕對定位精度,絕對定位精度是指支架系統末端執行機構的實際到達位置和理論位置之間的差值。本文選取的精度驗證方法是三點對齊法,因三點對齊法原理簡單,僅需要通過3個點對在同一坐標系中的坐標關系,即可以快速求出誤差,即在已知的對應3個點對中直接采用點到點的歐氏距離,其算法如下:
(4)
式中:(x1,y1,z1)—規劃的理論位置上點的坐標;(x2,y2,z2)—實際移動到的位置上點的坐標。
實驗中先確定定位系統中導板的初始位姿,然后求出導板在定位系統上到達理想位置應該進行的平移和旋轉量,最后通過定位系統調節導板,最終調節后的位置和理想位置必然存在一定的誤差。通過統計得出3組實驗分別選取的3個點的距離誤差如圖8所示。
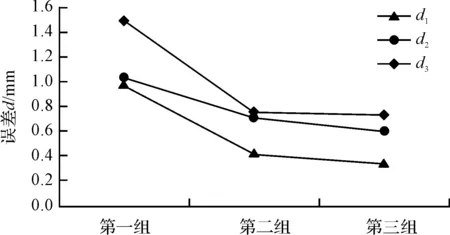
圖8 3組實驗誤差結果統計d1,d2,d3—表示每一組中選取的3個點對的歐氏距離
任意特征點實際絕對誤差的最大值可以直觀地由以上折線圖反映出來,偏差最大值均小于實際導板偏離理論值需要達到2.0 mm以內的需求[13]。所以該數字化導板定位系統可以輔助介入治療進行精確定位,比以往的頜面部定位系統精度有所提高。
4 結束語
本研究根據顱頜面介入手術導板定位的實際需求,利用D-H參數法進行運動學建模分析,結合六自由度數字化導板定位系統的零部件和關節參數建立了正運動學模型,得出定位系統末端在空間中的位置,并且通過Matlab對該定位系統進行空間仿真得出工作空間范圍是200×250×400 mm3,該范圍滿足實際手術要求的工作空間。最后搭建了模擬實際手術操作的實驗平臺,對該定位系統的精度進行了驗證,得到的誤差最大值為1.5 mm,小于目前普遍使用的輔助定位系統的誤差2.0 mm。該定位系統的設計可進一步應用于臨床。
在下一階段,本研究將進行動物學實驗來進一步驗證該定位系統的可靠性,進一步優化定位系統的設計和定位策略,減少實驗誤差。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
