基于激光位移傳感器的傾角誤差分析
2019-01-07 11:13:48孫興偉趙文濤朱新華
重型機(jī)械 2018年6期
關(guān)鍵詞:測(cè)量
孫興偉,趙文濤,朱新華
(沈陽(yáng)工業(yè)大學(xué) 機(jī)械工程學(xué)院,遼寧 沈陽(yáng) 110870)
0 前言
隨著我國(guó)航空航天、船舶艦艇、交通運(yùn)輸?shù)刃袠I(yè)的迅猛發(fā)展,對(duì)產(chǎn)品的精度要求也越來(lái)越高,因此精密檢測(cè)技術(shù)也顯得愈發(fā)重要。與傳統(tǒng)的接觸式測(cè)量相比,激光三角法因其非接觸的測(cè)量特性,所以可以對(duì)表面易劃傷工件進(jìn)行測(cè)量,并且具有測(cè)試速度更快、測(cè)量范圍大、無(wú)需二次裝夾等特點(diǎn),被廣泛應(yīng)用在工業(yè)生產(chǎn)和檢測(cè)等領(lǐng)域[1-3]。但是,激光位移傳感器的測(cè)量精度受其系統(tǒng)自身的非線性誤差、被測(cè)物體表面的粗糙度、被測(cè)物體表面的顏色以及被測(cè)物體表面的傾斜角等因素的影響[4-6],導(dǎo)致被測(cè)物體的精度不能準(zhǔn)確測(cè)得。因此,研究測(cè)量精度的影響因素變得尤為重要,本文對(duì)誤差影響因素中影響最大的——測(cè)點(diǎn)物面傾斜對(duì)測(cè)量精度的影響做了分析與研究。
1 激光三角法的測(cè)量原理
典型的直射式激光三角法測(cè)量原理圖如圖1所示,其光路主要由激光發(fā)射裝置、匯聚透鏡、接收透鏡、線陣COMS和后續(xù)信號(hào)處理設(shè)備五部分組成等。激光三角法的測(cè)量原理:激光源發(fā)射的激光束經(jīng)過(guò)匯聚透鏡后照射到被測(cè)物體的表面上,接收透鏡接收由被測(cè)物體表面所反射和散射的激光束,然后在線陣COMS感光元件上成像,從而把被測(cè)物體表面的光信號(hào)轉(zhuǎn)化為電信號(hào),再經(jīng)后續(xù)電路處理就可以識(shí)別出被測(cè)物體的位移變化量。測(cè)量過(guò)程中,激光位移傳感器的軸線,接收透鏡的光軸以及線陣CMOS平面,三者位于同一個(gè)平面內(nèi)。當(dāng)被測(cè)物體表面發(fā)生位移時(shí),散射光線在線陣COMS感光元件上成像點(diǎn)的位置也發(fā)生變化,如果能夠準(zhǔn)確測(cè)出像點(diǎn)在線陣CMOS上的變化量,那么通過(guò)激光三角法的測(cè)量原理,就可以進(jìn)一步計(jì)算出被測(cè)工件的移動(dòng)距離。
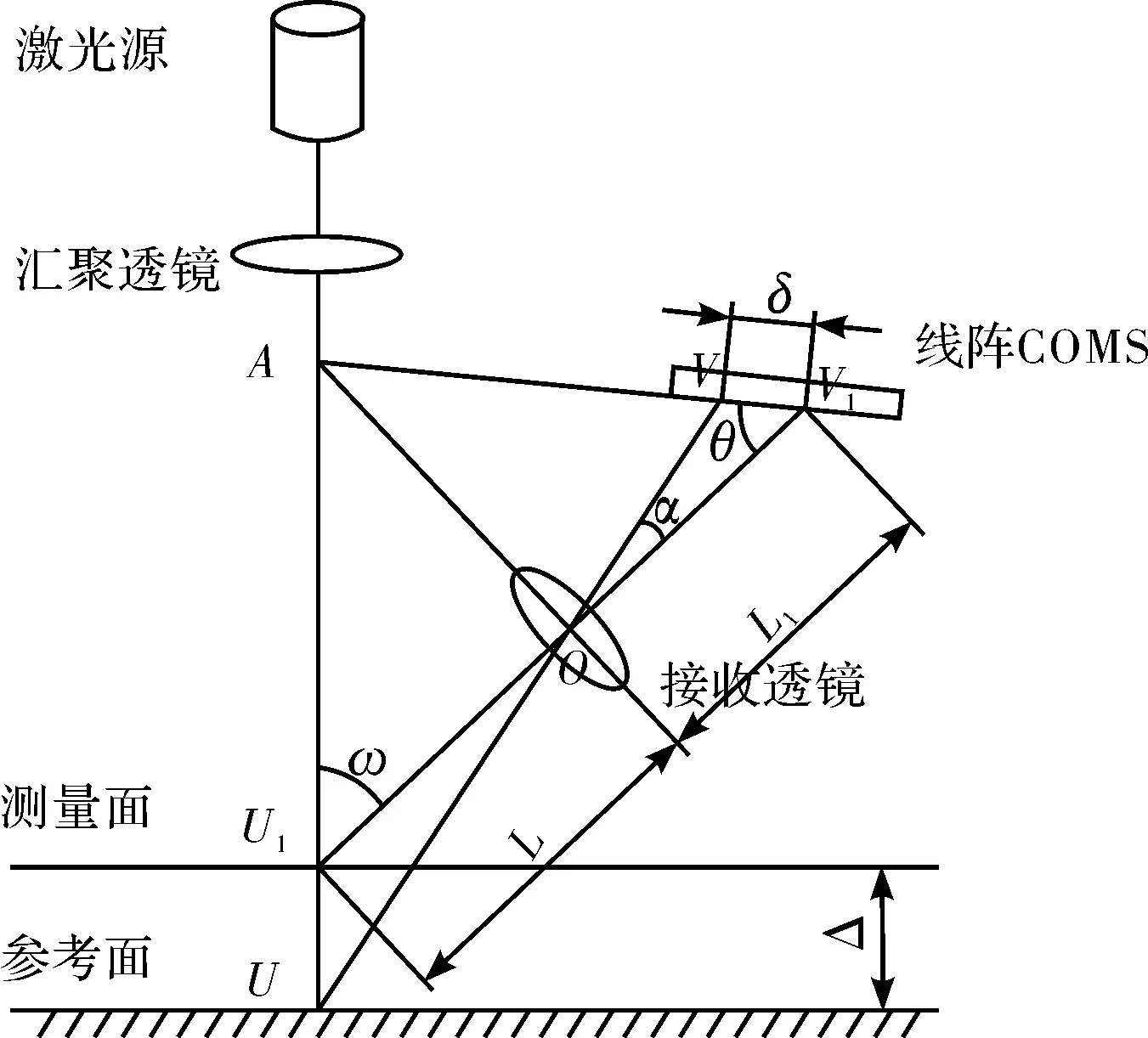
圖1 直射式激光三角法測(cè)量原理圖
假設(shè)當(dāng)激光源發(fā)射的激光束照射到參考平面上的位置U時(shí),散射光束經(jīng)接收透鏡接收后在線陣COMS上的成像位置點(diǎn)為V點(diǎn);當(dāng)被測(cè)表面發(fā)生位移Δ后(由位置U移動(dòng)到位置U1),在線陣CMOS上的光斑像點(diǎn)發(fā)生了位移δ(由位置V變化到位置V1),根據(jù)正弦定理可得:
在ΔU1OU中,
(1)
整理得
(2)
在ΔV1OV中,
(3)
整理得
(4)
合并可得
(5)
式中,α為兩條反射光束的夾角;ω為激光束與接收透鏡軸線的夾角;θ為線陣COMS光敏面與接收透鏡軸線的夾角;L為接收透鏡的物距,即測(cè)點(diǎn)U1到接收透鏡中心O點(diǎn)的距離;L1為接收透鏡的像距,即接收透鏡中心O到線陣CMOS上V1的距離。
2 傾角誤差補(bǔ)償模型的建立
2.1 傾角誤差產(chǎn)生的原因分析
由激光三角法的測(cè)量原理可知,測(cè)量過(guò)程中激光源發(fā)射的激光束與被測(cè)物體表面的法線方向在理論上是一致的,但是在實(shí)際測(cè)量時(shí),激光位移傳感器發(fā)出的光束總是和被測(cè)物體表面處的法線方向存在一定的夾角,這個(gè)夾角稱之為傾斜角,用β表示。被測(cè)物面傾斜改變了散射光束相對(duì)于接收透鏡的空間位置,相應(yīng)的被測(cè)點(diǎn)在線陣CMOS上的成像點(diǎn)位置也發(fā)生了變化,從而導(dǎo)致實(shí)際測(cè)量的結(jié)果與激光三角法測(cè)量原理中理論公式計(jì)算的結(jié)果存在一定的偏差。這就是物面傾斜時(shí)測(cè)量誤差產(chǎn)生的主要原因。
2.2 線陣CMOS上匯聚光斑的光能質(zhì)心位置的確定
由傾角誤差產(chǎn)生的原因可知,當(dāng)被測(cè)物面傾斜時(shí),檢測(cè)到的線陣CMOS光敏面上的成像光斑點(diǎn)的光能質(zhì)心位置相對(duì)其幾何中心發(fā)生了一定的偏移,因此光能質(zhì)心不再是成像光斑的幾何中心。為了定量的分析由于被測(cè)物面傾斜造成的誤差的變化規(guī)律,需要推導(dǎo)出在線陣CMOS上的成像光斑的光能質(zhì)心位置與被測(cè)物面傾斜角之間的關(guān)系。
首先,假設(shè)被測(cè)物面為理想的漫反射面,根據(jù)郎伯定律可知,散射光場(chǎng)的光強(qiáng)分布可以表示為[7]
I(φ)=I0cosφ
(6)
式中,φ為散射光束與物面法線的夾角;I(φ)為φ方向上單位立體角內(nèi)的散射光功率值;I0為法線方向的I值。
2.2.1 接收透鏡上光能質(zhì)心線角位置的確定
圖2給出了接收透鏡上接收面元的幾何示意圖,其中r=UO,即被測(cè)物光點(diǎn)U到接收透鏡中心O的直線距離,dS為接收透鏡上與接收面垂直的條狀面元,dΩ為該條狀面元所對(duì)應(yīng)的物光點(diǎn)所張的立體角。由于接收透鏡的半徑R很小,所以近似地認(rèn)為該面元上的散射光處處相同。因此,在單位時(shí)間內(nèi)dS接收的光能為
dE=Icos(γ0-γ)dΩ
(7)
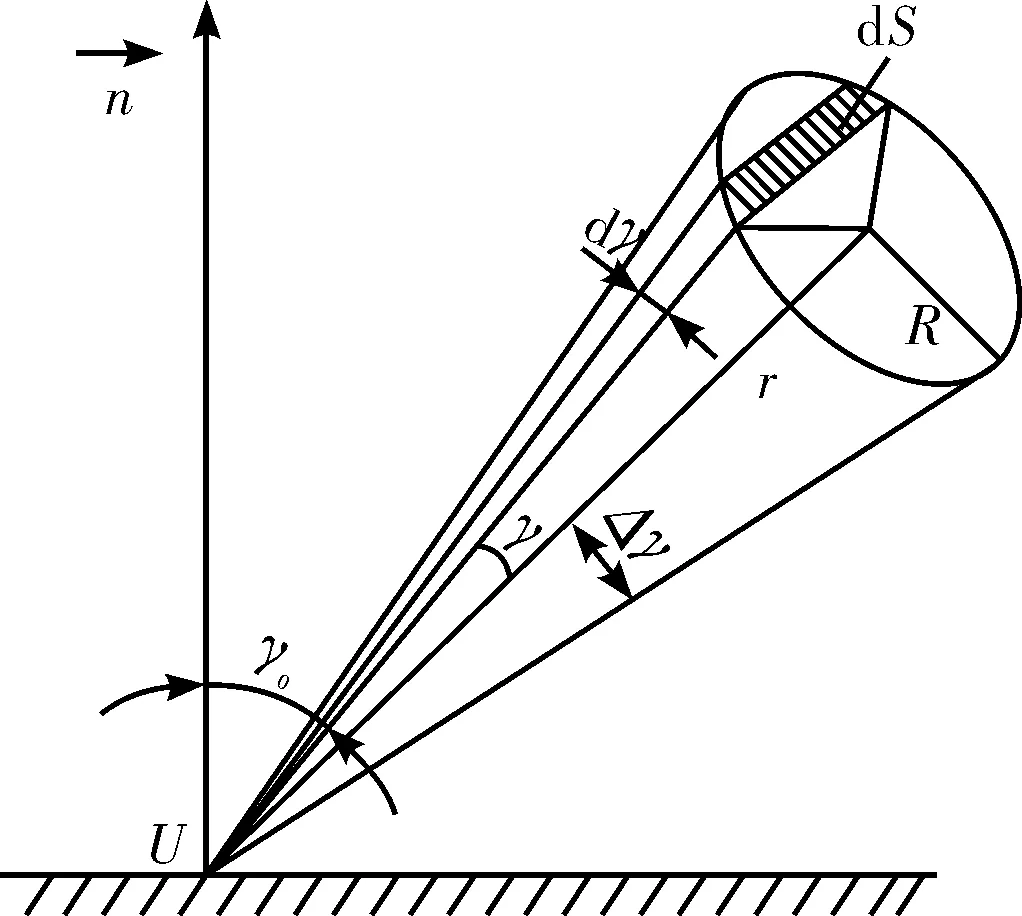
圖2 接收面元幾何示意圖
根據(jù)接收面元幾何示意圖可知:
(8)
(9)
由于R≤r,將式(8)、(9)帶入(7)整理得
(10)
本文中當(dāng)γ順時(shí)針轉(zhuǎn)動(dòng)時(shí)為正。假設(shè)當(dāng)γ=γ′時(shí),接收透鏡在垂直接收面處被分成兩個(gè)光能接收量相等的部分,此時(shí)稱γ′為接收透鏡上光能質(zhì)心線的角位置。
(11)
整理后得出接收透鏡上光能質(zhì)心線的角位置γ′為
(12)
2.2.2 線陣CMOS上匯聚光斑的光能質(zhì)心位置的確定
圖3給出了線陣CMOS上匯聚光斑的光能質(zhì)心示意圖,反射光線MB經(jīng)接收透鏡折射后入射到線陣CMOS上的C點(diǎn)。M的像點(diǎn)為M2,物距a與像距b滿足
(13)
根據(jù)幾何關(guān)系可推得
(14)
(15)
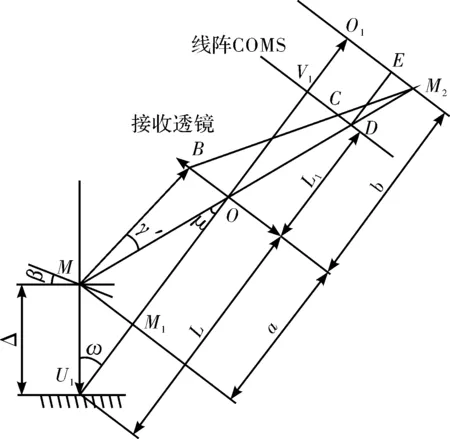
圖3 匯聚光斑的光能質(zhì)心示意圖
所以質(zhì)心線在線陣CMOS上的投射點(diǎn)C的離軸距離為V1C,也就是V1D與CD的差,即線陣CMOS上匯聚光斑的光能質(zhì)心坐標(biāo)為
(16)
2.3 物面傾斜造成的測(cè)量誤差的確定
根據(jù)式(12)、(16)就可以求出被測(cè)物面的傾斜誤差,從而分析其變化規(guī)律。
當(dāng)激光位移傳感器的入射光線與被測(cè)物面的法線方向一致,即物面的傾斜角為0時(shí),線陣CMOS上成像光斑的光能質(zhì)心坐標(biāo)為
(17)
式中,γ″是被測(cè)物面傾角為0時(shí)的γ′值。
所以由物面傾斜產(chǎn)生的線陣CMOS上光斑的光能直線移動(dòng)量為
[tanω-tar(ω-β)]
(18)
由此可知Δ″與傾角誤差Δ0之間的關(guān)系為
(19)
整理后得到傾角誤差Δ0為
(20)
根據(jù)式(20)可知,傾角誤差Δ0除了與激光位移傳感器的結(jié)構(gòu)參數(shù)有關(guān)外,還和被測(cè)物體表面移動(dòng)距離Δ以及物面傾角β有關(guān),并且可以發(fā)現(xiàn)如下規(guī)律:
(1)傾角誤差的大小與激光位移傳感器的結(jié)構(gòu)參數(shù)有關(guān),與R2成正比,與L2成反比,且隨著ω角的增加而增大;
(2)當(dāng)被測(cè)物體表面的位移Δ一定時(shí),傾角誤差隨傾斜角β的增加而增大;
(3)當(dāng)傾斜角β一定時(shí),傾角誤差隨被測(cè)物體表面的位移Δ的增加而增大;
(4)當(dāng)β為負(fù)值時(shí),傾角誤差的正負(fù)與被測(cè)物體表面位移的正負(fù)相反;當(dāng)β為正值時(shí),傾角誤差的正負(fù)與被測(cè)物體表面位移的正負(fù)相同。
3 傾角誤差實(shí)驗(yàn)分析
實(shí)驗(yàn)采用日本KEYENCE公司生產(chǎn)的IL-030型激光位移傳感器進(jìn)行了實(shí)際測(cè)量,其光路參數(shù)為:R=5 mm,L=60 mm,ω=30°,將實(shí)驗(yàn)測(cè)得的數(shù)據(jù)與經(jīng)過(guò)誤差補(bǔ)償后的數(shù)據(jù)用MATLAB處理后得到圖形如圖4所示。
通過(guò)圖4可以看出,激光位移傳感器的測(cè)量精度在經(jīng)過(guò)傾角誤差補(bǔ)償公式補(bǔ)償后得到了明顯提高。
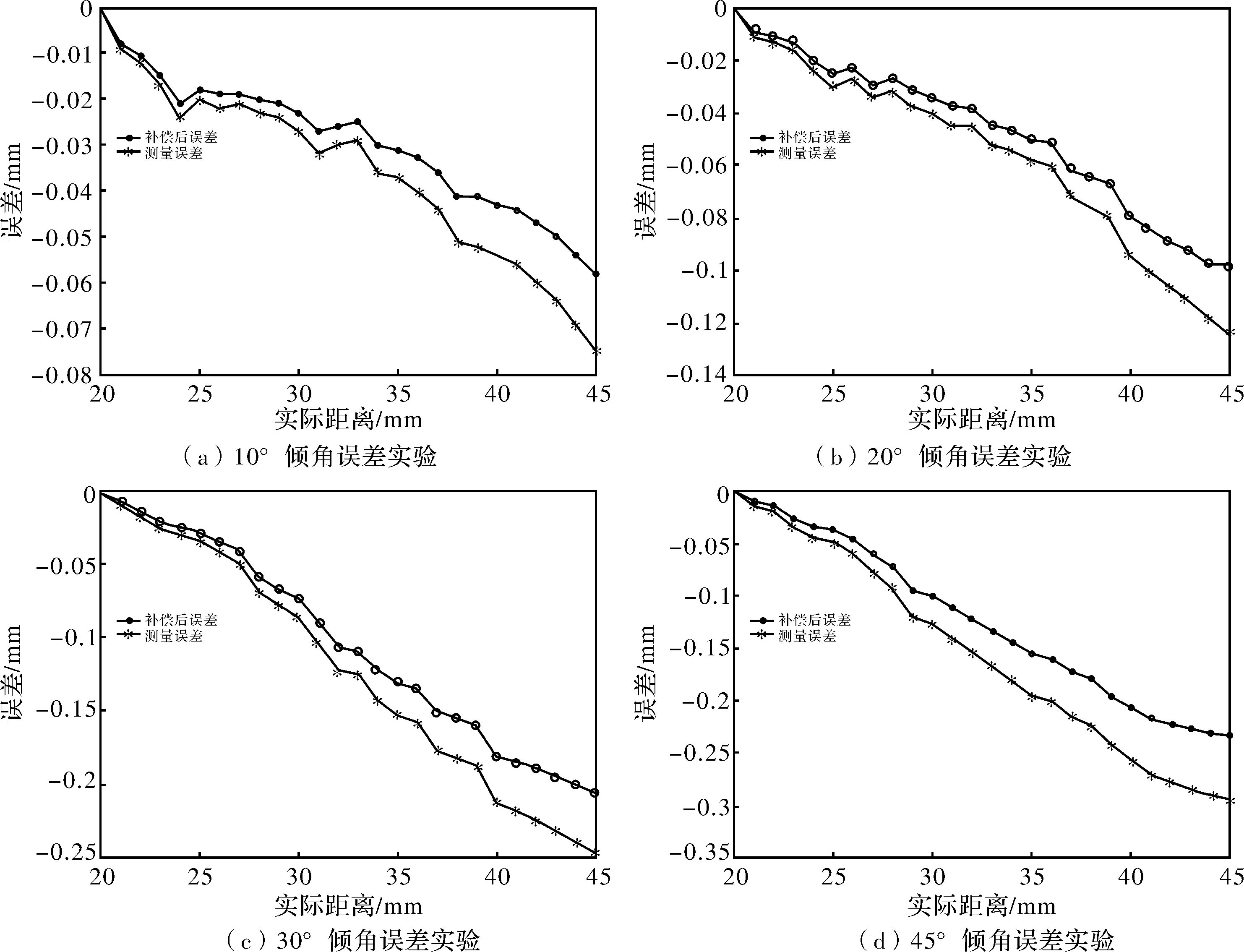
圖4 傾角誤差補(bǔ)償實(shí)驗(yàn)曲線圖
4 結(jié)論
在假設(shè)被測(cè)物面為理想的漫反射面的前提下,推導(dǎo)出了被測(cè)物面傾斜角與測(cè)量誤差的幾何關(guān)系。實(shí)驗(yàn)表明,該方法提高了被測(cè)物面的測(cè)量精度,對(duì)產(chǎn)品的加工和檢測(cè)具有一定的指導(dǎo)意義。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
