Ka波段機載雙模式干涉SAR系統設計及測量精度分析
2019-01-17 01:06:42鄭世超孫志強孔令振
上海航天 2018年6期
鄭世超,王 輝,孫志強,孔令振
(1.上海航天技術研究院 毫米波遙感技術重點實驗室,北京 100086;2. 上海航天技術研究院 毫米波遙感技術重點實驗室,上海 201109)
0 引言
與傳統低頻段合成孔徑雷達(SAR)相比,Ka波段SAR系統具有以下優點:一是分辨率更高。Ka波段可用的帶寬更大,相同波束寬度下天線尺寸更小,因此Ka波段SAR比低頻段SAR容易獲得更高的距離向和方位向分辨率。二是體積更小、重量更輕。Ka波段天線和射頻模塊的尺寸更小,具有體積小的特點。三是目標輪廓效應更加明顯。雷達工作頻段越高,目標輪廓效應越明顯,因此Ka波段目標幾何外形的輪廓能產生更強的回波,有利于獲取清晰的目標細節。
近幾年,隨著核心功率器件水平的不斷提升,美國、歐洲開始研究Ka波段在SAR領域尤其在干涉SAR領域的應用[1]。與低波段SAR系統相比,Ka波段干涉SAR能以較短的干涉基線獲得相同的干涉測量精度,大幅降低了高精度干涉測量的實現難度[2-3],能夠在同一系統中實現高精度的順軌干涉與交軌干涉。基于以上特點,本文提出了1套Ka波段雙模式干涉SAR系統,可用于驗證雙模式干涉SAR的可行性。
該系統在交軌干涉模式下,針對Ka波段電磁波穿透性較弱的特點,重點驗證對水面高度、水流速度的測量能力。考慮到Ka波段SAR系統的損耗較大,該驗證系統選取較小的工作視角。在小入射角條件下,水面較強的后向散射系數可大幅降低系統所需的發射功率與天線增益,且根據干涉測高原理,小視角更有利于實現更高的干涉測高精度[4-6]。
在順軌干涉模式下,為保證測量精度,該驗證系統選取較大的工作視角[7-8]。采用數字波束合成掃描接收技術(DBF-SCORE)滿足在較大工作視角下系統所需的功率增益積[9-10]。
本文對Ka波段雙模式干涉SAR驗證系統進行介紹,并給出該系統的參數設計與仿真結果。在此基礎上,對該系統在雙模式下的干涉測量精度進行了仿真分析,為后續的飛行試驗干涉測量性能提供了理論分析依據。
1 Ka波段雙模式干涉SAR系統
Ka波段雙模式干涉SAR系統主要由三部分組成:天線子系統、雷達數字子系統和穩定平臺。系統的組成架構如圖1所示。

圖1 系統組成框圖Fig.1 System structure
1.1 天線子系統
天線子系統由天線、頻綜接收機、內定標器、預功放組成。為了降低天線設計難度,提高天線工作效率,該系統采用天線收發分置設計。發射天線尺寸為450.0 mm×33.6 mm,峰值發射功率為315 W。根據系統工作模式,接收天線可分為交軌天線和順軌天線兩部分。單副交軌天線陣列口徑為44.8 mm×450.0 mm,2副交軌天線沿距離向間隔排布,形成224 mm的交軌基線;單副順軌天線陣列口徑為89.6 mm×225.0 mm,2副順軌天線沿方位向間隔排布,形成225 mm的順軌基線。其中單副順軌陣列沿距離向由4個接收子陣構成,每個子陣口徑為22.4 mm×225.0 mm。整個天線的布局如圖2所示。
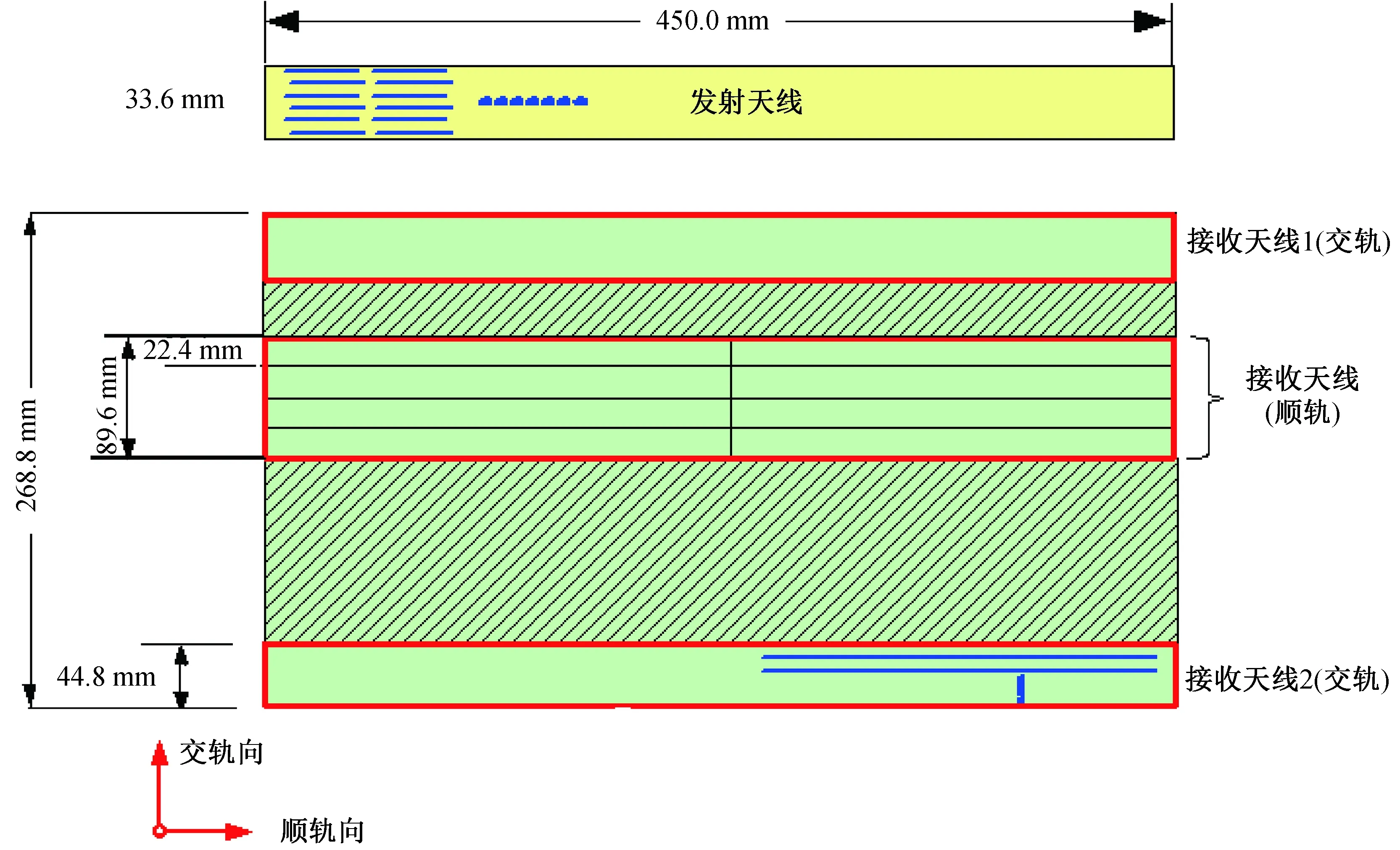
圖2 天線布局示意圖Fig.2 Antenna architecture
發射天線仿真的天線方向如圖3所示。
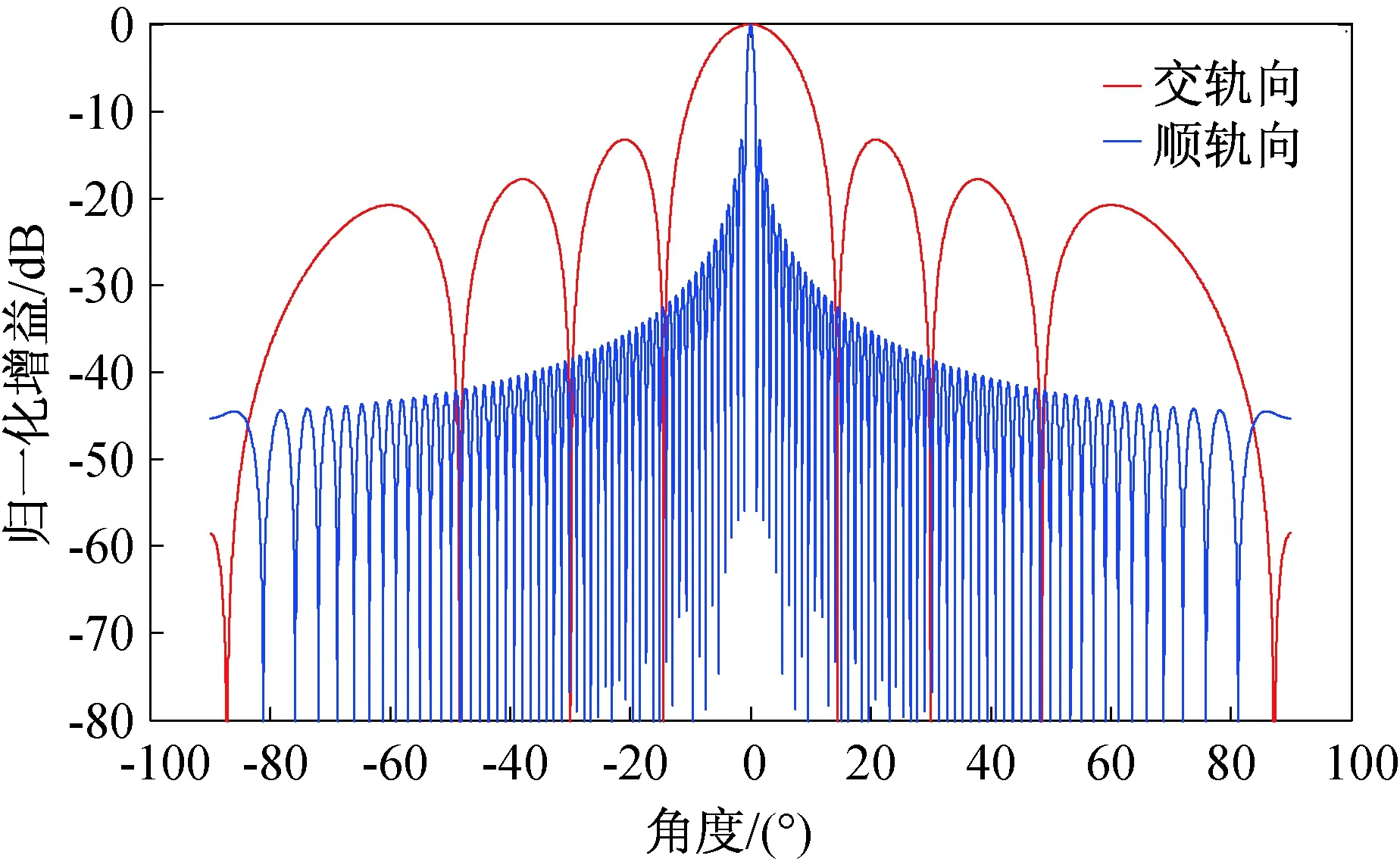
圖3 發射天線方向圖Fig.3 Transmitting antenna pattern
交軌接收天線仿真得到的天線方向如圖4所示。
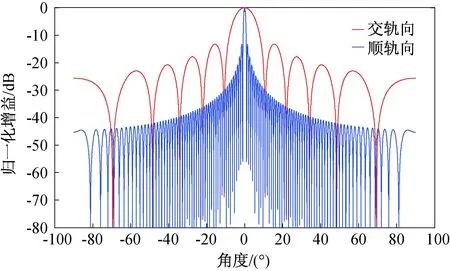
圖4 交軌接收天線方向圖Fig.4 Cross-track receiving antenna pattern
順軌接收天線單個子陣仿真得到的方向如圖5所示。
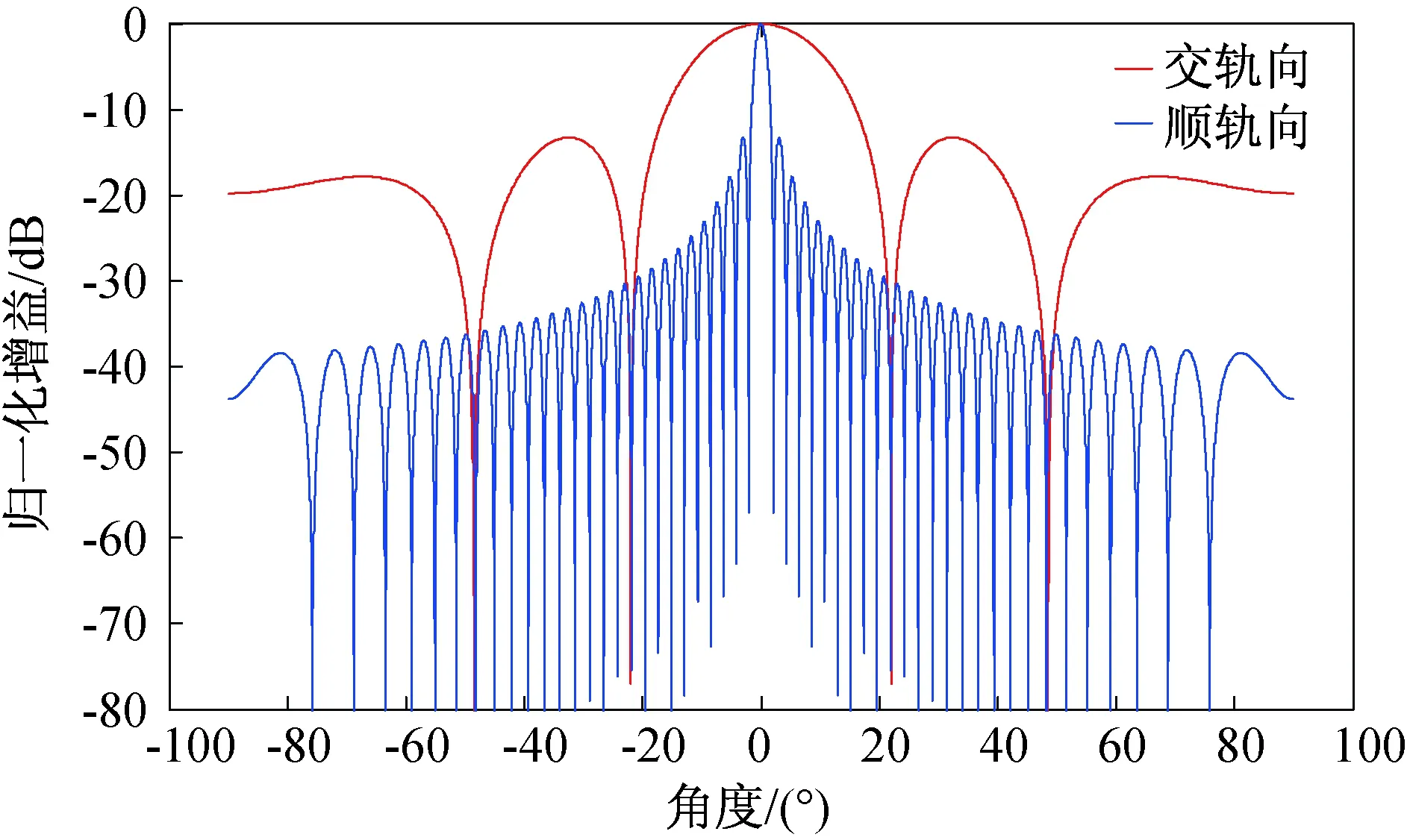
圖5 順軌接收天線方向圖Fig.5 Along-track receiving antenna pattern
1.2 雷達數字子系統
雷達數字子系統由監控定時器、DBF數字接收機、雷達配電器組成。其中:DBF數字接收機主要實現數據采集、預處理、DBF實時處理及存儲等功能,由采集處理模塊、數據存儲模塊、通信接口模塊、主機模塊和電源模塊組成。
該驗證系統在順軌干涉模式下采用4通道DBF-SCORE技術。為了降低輸出的數據率,需要實時進行DBF處理。為滿足該需求,數字接收機選用Xilinx Virtex-6系列FPGA,將所有的功能模塊集中在單片FPGA中實現,完成所有高速數據I/O接口和外部芯片的控制,配合PCIE接口及主機平臺協同完成高達3.2 GBit/s的持續數據傳輸,并完成數據實時信號處理。
1.3 穩定平臺
根據系統干涉測量性能仿真要求,穩定平臺及導航系統應滿足姿態測量精度0.01°、位置精度0.05 m的要求。
高質量的SAR成像是高精度干涉測量的前提,該驗證系統選用徠卡PAV80陀螺穩定座架,以保證天線波束指向的穩定性,減小波束指向不穩定對成像質量的影響,其垂直于偏流方向的穩定精度均優于0.02°(RMS),可以很好地實現雷達波束的高穩定度控制。同時,為了降低系統誤差對干涉測量結果的影響,穩定平臺集成了POS AV610高精度慣性導航系統,實時記錄定位定向數據并經過高效率軟件處理后,獲得了高精度的定位定向數據,后處理定位精度為0.05 m,姿態精度為0.008°。
2 系統參數及干涉測量精度仿真分析
為了驗證該系統設計及信號處理方法,開展雙模式干涉測量的機載飛行試驗,系統的基本工作模式為條帶模式。飛行試驗的主要參數見表1。對于機載飛行試驗,模糊度指標很容易滿足要求。因此,在SAR系統參數設計時重點針對分辨率和等效噪聲系數(NESZ)指標開展分析。其中:分辨率主要影響干涉測量數據的網格大小;NESZ指標主要影響系統信噪比,進而影響干涉處理2幅圖像之間的相干性。

表1 系統參數Tab.1 System parameters
2.1 交軌干涉模式
根據法國太空研究中心的近底視Ka波段數據采集實驗結果可得:當入射角≤15°時,Ka波段的水面后向散射系數優于0 dB。該系統交軌干涉模式下的最大工作視角為13.3°,因此對應的目標后向散射系數優于0 dB,當系統NESZ優于-10 dB時,可保證系統獲得足夠高的信噪比和較好的干涉測量結果。交軌干涉模式工作視角范圍內的NESZ仿真結果如圖6(a)所示。該系統在交軌干涉模式下的方位分辨率優于0.3 m。地距分辨率取決于發射信號帶寬和系統工作視角,該系統在工作視角范圍內的地距分辨率仿真結果如圖6(b)所示。

圖6 系統參數仿真結果Fig.6 System parameter simulation results
根據干涉測高原理,直接影響干涉高程測量精度的因素有5個:飛行高度H、雷達至目標點的作用距離R、基線長度B、基線傾角α和干涉相位φ[5]。在機載飛行試驗中,H由GPS測量信息得到;R通過雷達回波延時測得;B,α通過基線測量系統或間接估計所得;φ由2幅SAR圖像干涉處理獲取。假設各因素不相關,InSAR測高的總均方根誤差(高程測量的絕對精度)可表示為

(1)
式中:σH,σR,σB,σα,σφ分別為飛行高度誤差、斜距誤差、基線長度誤差、基線傾角誤差、干涉相位誤差。其中,前4項誤差可根據系統所采用的導航系統及穩定平臺精度初步確定,基于相應參數分析其對應的高程測量誤差,并可在處理過程中進行校正,以進一步降低其對最終高程測量結果的影響。σφ主要取決于主輔圖像的相干系數和處理過程中選取的多視數,影響主輔圖像相干系數的因素主要包括體散射去相干、時間去相干、多普勒去相干、基線去相干、模糊去相干和信噪比去相干。由于該系統采用單次航過單平臺干涉測量,因此體散射去相干和時間去相干的影響可以忽略不計。
基于以上分析,結合該系統相應工作參數,對各項誤差導致的高程測量誤差和絕對高程測量精度進行了仿真分析,結果如圖7所示。在100 m網格條件下,絕對高程測量精度可達到0.5 m。分析各誤差因素的測高誤差貢獻量,結果發現:干涉相位誤差和基線誤差是影響高程測量精度的主要因素。
基于以上仿真分析,表2給出了交軌干涉模式下的系統參數及性能。
2.2 順軌干涉模式
根據順軌測速原理,目標距離向速度與干涉相位之間的關系為
(2)
式中:λ為波長;φ為干涉相位;vp為平臺速度;B為順軌干涉基線;θ為入射角。由式(2)可見,θ越大,目標距離向速度的測量精度越高。綜合考慮系統代價與測速精度,該驗證系統選取的工作視角為15.6°~28.3°。
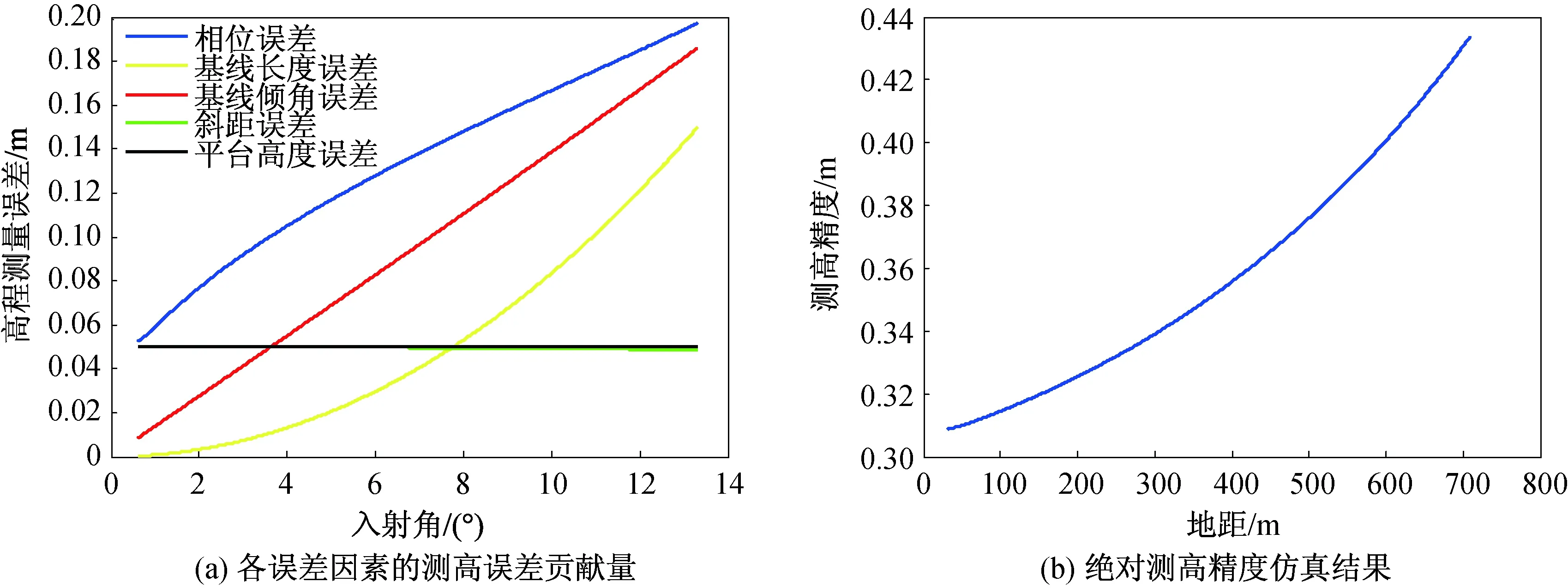
圖7 測高誤差貢獻量與絕對測高精度的仿真結果Fig.7 Simulation results of height error contribution and absolute height error
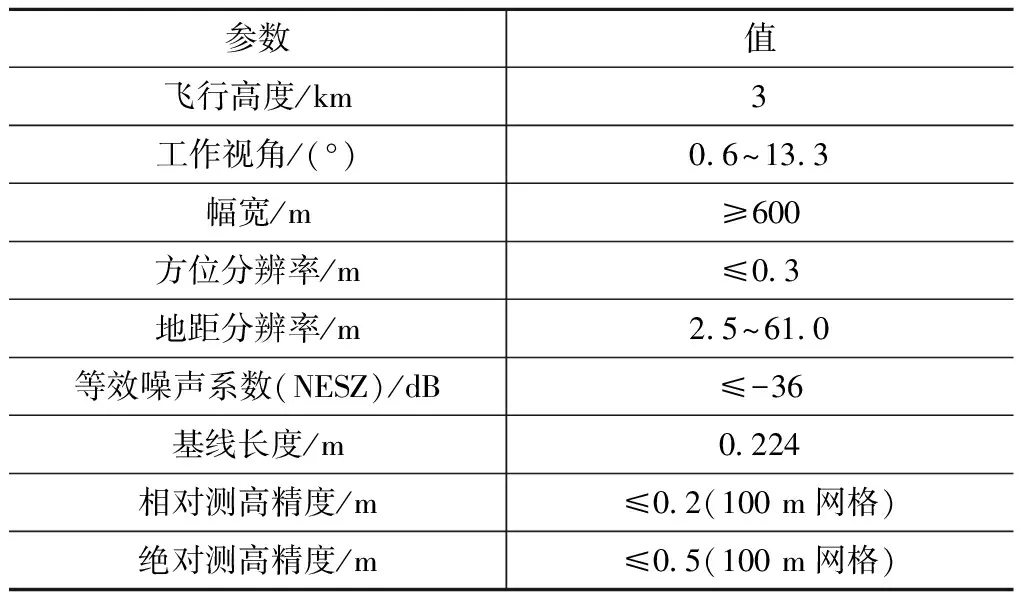
表2 交軌干涉模式系統性能參數Tab.2 System performance of XTI mode
由雷達后向散射統計數據可得:當θ≤30°時,Ka波段水面后向散射系數優于-26 dB。為保證系統信噪比,該系統在順軌干涉模式下的NESZ需優于-34 dB[11]。
經過天線設計,該系統在順軌干涉模式下的方位分辨率優于0.2 m,系統參數仿真結果如圖8所示。地距分辨率仿真結果如圖8(a)所示。根據系統參數仿真得到的NESZ如圖8(b)所示。
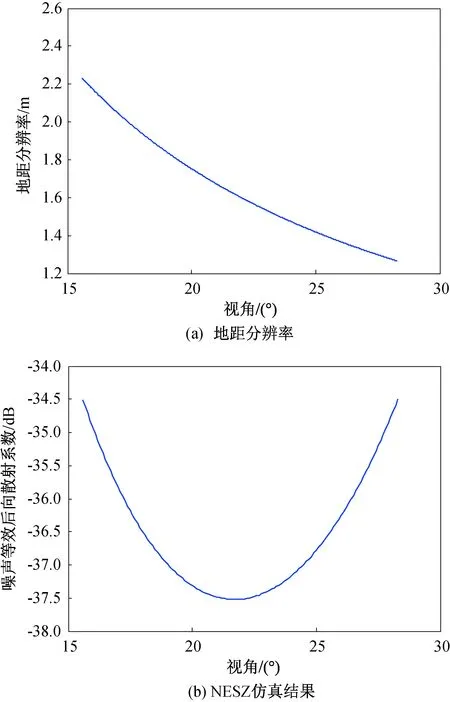
圖8 系統參數仿真結果Fig.8 System parameter simulation results
根據系統天線設計,順軌干涉模式下的基線長度為0.225 m,據此仿真得到10 m網格條件下的目標速度測量精度,如圖9所示。由仿真結果可以發現,由于Ka波段的波長短,系統在基線較短、工作視角較小的情況下仍能獲得0.1 m/s的測速精度。
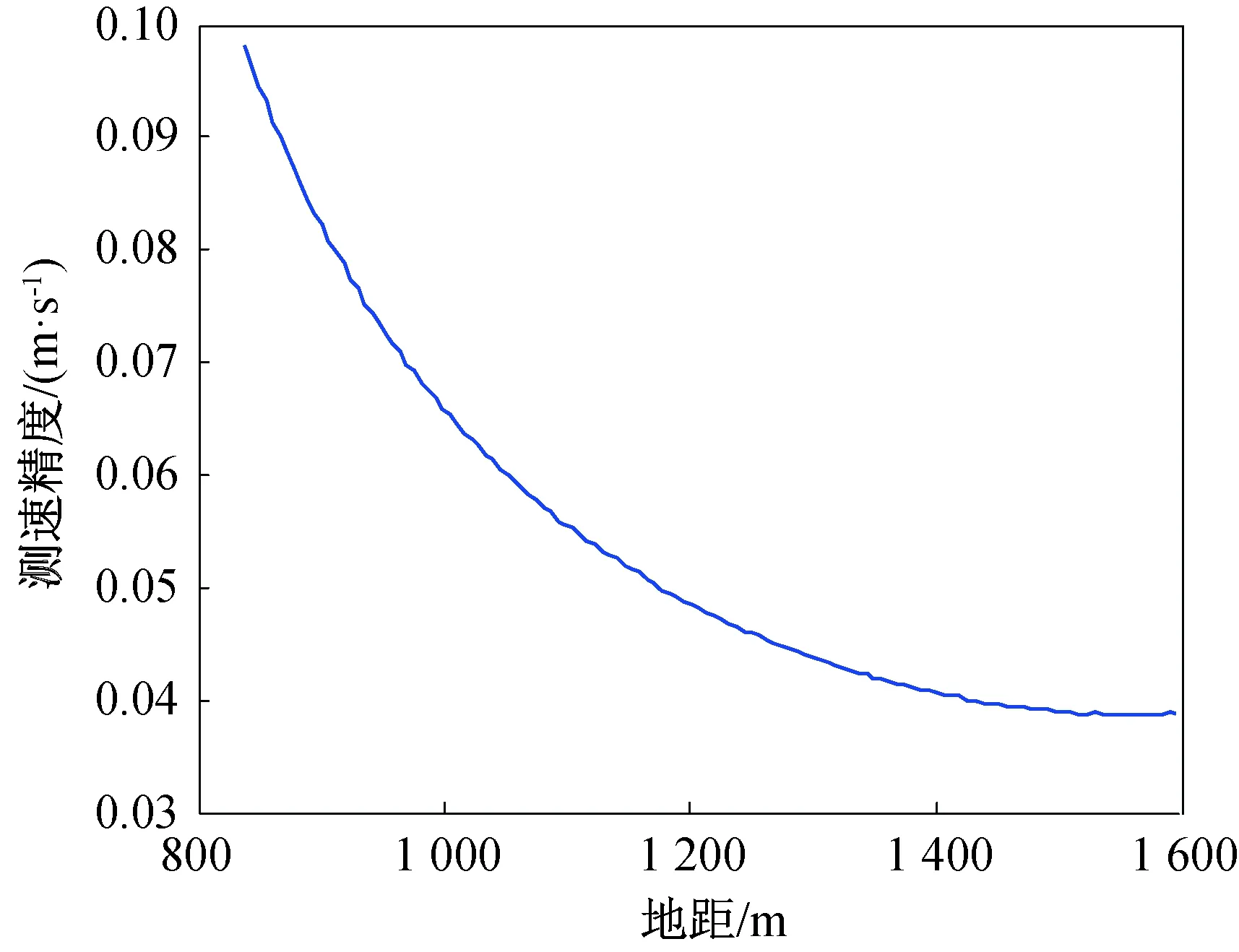
圖9 測速精度仿真結果Fig.9 Simulation results of velocity measurement accuracy
基于以上仿真分析,給出了順軌干涉模式下的系統參數及性能,見表3。
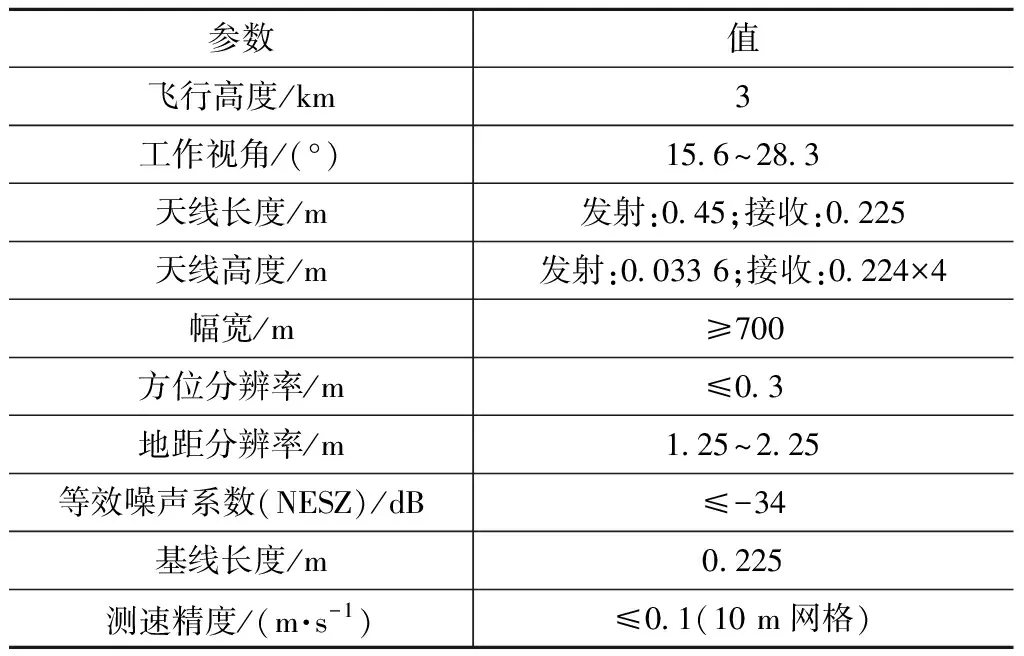
表3 順軌干涉模式系統性能參數Tab.3 System performance of ATI mode
4 結束語
高精度、高效率測量已成為現代遙感的重要發展方向。傳統低波段干涉SAR系統所需基線長,難以同時實現交軌干涉測高和順軌干涉測速,不利于高效率干涉測量。Ka波段波長較短,對干涉相位敏感,能以較短的基線獲得高精度的干涉測量結果。為此,對機載Ka波段雙模式干涉SAR系統開展了研究,對該驗證系統進行了介紹,仿真分析了系統參數與干涉測量精度,驗證了Ka波段雙模式干涉SAR系統的可行性,為后續的飛行試驗干涉測量性能提供了理論分析依據。
由于目前研究主要基于干涉理論,缺乏相應實測數據的支撐,因此后續將根據飛行試驗獲取的實測數據對系統仿真與設計進行進一步驗證。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
