無人機傾斜攝影測量在礦山地質中的應用研究
2019-01-19 06:12:56朱磊
裝飾裝修天地 2019年24期
關鍵詞:應用
朱磊
摘 ? ?要:中國是礦產大國,礦物種類多,分布廣,開采及治理水平參差不齊。處理不當會引起資源浪費、環境污染等問題,甚至導致地質災害,威脅生命財產安全。為了監督合理開發,檢查私挖亂采,保護環境杜絕災害的發生,需要摸清中國現階段礦山地質情況,類如計算儲量、定邊定界等工作成為重中之重。礦山地質測量無疑為該項工作提供了基礎數據保障。
關鍵詞:無人機傾斜攝影測量;礦山地質;應用
1 ?傾斜攝影測量
1.1 ?定位原理
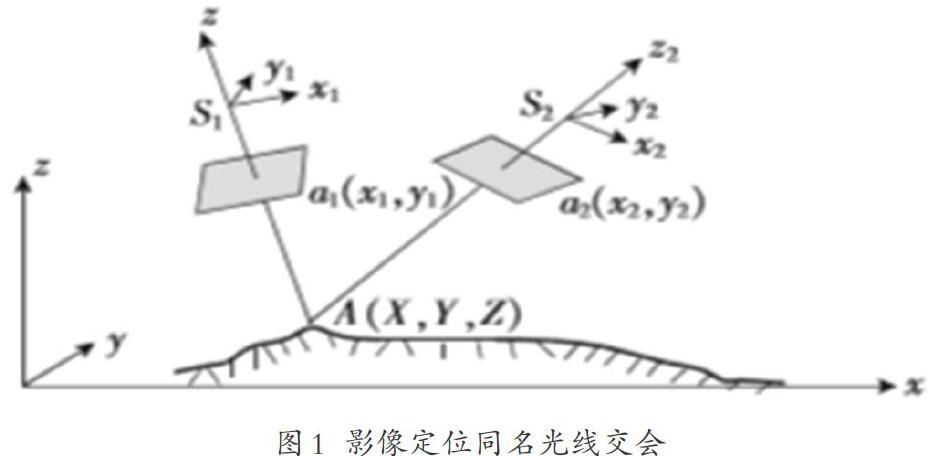
眾所周知,測量的本質是定位,定位的本質是獲取坐標。傳統測量通過人工定位,直接接觸目標獲取坐標;而攝影測量則通過影像定位、同名光線交會計算坐標。使光線交會則需要滿足一定條件,如圖1所示。圖中,A為物方點,a1、a2為物方點投影在兩個像片上的像點,S1、S2為兩個像片的攝影中心。從圖1可以看出,想要通過光線交匯完成定位,需要知道像片的實時姿態,即恢復外方位元素Xs、Ys、Zs、φ、ω、κ(Xs、Ys、Zs為線元素,φ、ω、κ為角元素)6個參數,且須知內方位元素x0、y0、f的數值。
1.2 ?優勢提升
(1)定位精度。眾所周知,測量數據都存在誤差,在必要觀測條件下無法對誤差進行消除和減弱,因此需要進行多余觀測,傾斜攝影測量在相同條件下的數據量是豎直攝影的2~5倍,大大增加了多余觀測,提高了精度。另外,阿貝比長原理規定:量測長度時尺子與目標平行則結果最優,角度越大則誤差越大。而對攝影測量而言,O1、O2為兩個不同角度的攝影中心,其攝影基線與目標越接近平行即光軸與目標盡可能垂直,則測量精度越高。傳統攝影測量只從豎直方向觀測,其基線平行于XY平面,因此該模式下的目標在XY方向精度最高,而與XZ、YZ平面角度過大使在Z方向的精度成為傳統攝影的短板。傾斜攝影測量增加了大角度影像觀測,其攝影基線與XZ、YZ平面的夾角大幅度減小,對某些特殊側面甚至接近平行,由此不僅提高了Z方向精度,而且進一步減小了X、Y方向的誤差。同時多方位的拍攝更好地獲取了目標側面的紋理,實現了不同角度信息的互補,對輪廓的還原效果更優。
(2)成果質量。傳統豎直攝影測量生成的基本都是二維平面數據,分析起來較為困難,對技術經驗要求較高,某些盲區還需要后期現場補測調繪。而傾斜攝影測量的成果以三維模型為主,在高精度的數字表面模型DSM基礎上進行紋理映射,直觀性強,使用者能夠方便地在模型上對礦山地質的剖面、溝坎、坡向線進行分析,對不同種類的區域例如采礦區、找礦區、廢棄物堆積區等區域的判讀率也提高了很多,此外還可以在模型上繪制傳統豎直攝影測量生成的數據成果。因此,傾斜攝影測量為從業者提供了更加全面的基礎數據。
1.3 ?技術流程
1.3.1 ?外業采集
由于建模對精細度要求很高,而旋翼機較固定翼飛行高度低,速度慢,能夠很好地拍攝目標紋理,因此在飛行平臺的選取上以旋翼機為主。相機應搭載多鏡頭,即1個下視鏡頭和數個傾斜鏡頭,通常以5鏡頭為主。根據測區地形規劃航線,重疊度應在70%以上,分辨率應設定在5cm以內,并以此定義航高。若測區面積較大,單個架次無法完成時,應當在架次之間保留1~2條航線的重疊,以便后期能準確拼接。設定完畢后,飛機按航線飛行進行拍攝,其后檢查像片是否有大量曝光、云煙遮擋現象,有無漏拍、序號與POS信息是否對應等情況,合格后便可進行下一步的處理。
1.3.2 ?內業處理
由于現今傾斜相機還不能計算自身POS,只有下視鏡頭具有位置姿態信息,因此只能通過下視鏡頭和傾斜鏡頭的位置關系計算所有像片。將像片加載進相關建模軟件,分別進行空中三角測量(簡稱空三)、點云匹配、DSM生成、表面重建、紋理映射等,生成最終的三維立體模型。同時,在該模型基礎上,利用第3方軟件,生成傳統豎直攝影常出的數字正射影像DOM和數字線劃圖DLG,可謂是一模多用。
2 ?實踐操作
2.1 ?測區概況
本次實驗測區選在某石料礦區,欲通過后期所測數據,圈定目標區域礦界、了解開采情況、描繪實地地形以及后期合理規劃等。該礦區范圍為東經112.60~112.62°,北緯38.17~38.18°,面積約1km2。測區內以山地為主,海拔多在1100m~1400m,相對高差100m~400m,且部分遮擋較多,傳統豎直攝影測量無法完全覆蓋拍攝,故采用傾斜攝影方法采集數據。
2.2 ?處理流程
2.2.1 ?飛行平臺及相機
本次飛行平臺選用哈瓦MEGA-V8Ⅱ旋翼無人機,該飛機采用全碳纖維材料一體成型技術、配合航空專用鎂合金、鈦合金等尖端材料和工業級傳感器芯片技術,機身826mm×1050mm×578mm,最大起飛重量12kg,飛行半徑可達14km,續航時間30min,抗風能力達到7級,且具有后差分解算系統。該平臺搭載的相機是定做的HARWAR-YT-5POPCⅢ5鏡頭傾斜航攝儀,其中1個下視鏡頭,4個傾斜鏡頭,傾角為45°,像素達到1億級,該相機5個鏡頭同時曝光,曝光時間為1/4000s,最小曝光間隔為2s。
2.2.2 ?控制點布設及航線規劃
測區內山地較多,地形條件差,大部分區域人工無法到達,因此選擇較為平緩的地方布設像控點,以便將模型納入到目標坐標系下,并且起到精確的控制作用。由于飛機自帶后差分解算系統,一定程度上精化了POS數據,故能夠保證測量精度滿足要求。飛行時間段選在上午十一點左右,期間光照適中。為了防止出現漏拍等信息不完整的情況、保證模型精細程度,本次地面采集分辨率設定為5cm,相對飛行高度相應為250m,航向重疊度設置為80%、旁向重疊度設為75%,航線為南北方向,共分2個架次,架次之間有2條航線的重疊區,以便后期拼接。本次飛行有50條航線,共計3700張像片,POS數據完整,影像質量正常。
2.2.3 ?內業處理
(1)空中三角測量。空三是恢復像片實時位置和姿態的過程,恢復了位置姿態,就能通過影像進行定位,因此空三是整個過程中決定精度的環節,可以說是重中之重。先導入所有像片,加載相應POS文件后提交空三。軟件以其強大的傾斜影像匹配算法,準確找出各個像片間的同名點,完成相對定向,并通過刺像控點、平差計算,得出最終的坐標信息。空三結束后,整體的精度也就確定了。
(2)模型重建。空三后進行模型重建。點擊重建以后,軟件首先通過恢復姿態的多個影像同名光線相交,得出物方密集點云;然后在密集點云基礎上建立不規則三角網,形成一個個面片,完成表面重建;最后通過泊松融合方法將像素賦予所形成的面片,使復雜的圖形場景呈現出真實感。
參考文獻:
[1] 方忠平.基于無人機傾斜攝影測量技術的三維建模和精度分析[J].工程建設與設計,2019(10):247.
猜你喜歡
科技視界(2016年21期)2016-10-17 19:54:47
科技視界(2016年21期)2016-10-17 19:54:05
科技視界(2016年21期)2016-10-17 18:46:46
科技視界(2016年21期)2016-10-17 18:37:58
科技視界(2016年21期)2016-10-17 18:28:05
考試周刊(2016年76期)2016-10-09 08:45:44
大學教育(2016年9期)2016-10-09 08:28:55
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01