低溫余熱磁懸浮發電機轉子軸系振動機理研究
2019-01-22 04:39:46紀歷
電機與控制學報 2019年11期
紀歷
摘?要:采用磁懸浮高速直驅發電設備能夠顯著地提高低溫余熱發電系統的效率。以磁懸浮高速永磁發電機為對象,研究磁懸浮轉子受到的電磁不平衡拉力及其軸系的徑向振動情況。文中綜合考慮磁懸浮轉子靜、動態偏心,結合麥克斯韋應力法與等效磁路法推導了電機不平衡拉力的解析模型,并結合轉子質量不平衡激勵以及磁懸浮軸承的控制反力研究了轉子的振動情況。文中通過計算、仿真及試驗對影響不平衡拉力的主要因素進行了詳細分析,得到了其與偏心量幅度、發電機轉矩角以及轉子磁動勢與偏心角度的初始相差等多個因素的關系,所得研究結論為抑制磁懸浮發電機轉子振動提供了理論依據。
關鍵詞:余熱發電;磁懸浮轉子;不平衡拉力;轉子偏心;永磁電機
DOI:10.15938/j.emc.2019.11.009
中圖分類號:TM?355
文獻標志碼:A
文章編號:1007-449X(2019)11-0067-09
收稿日期:?2017-11-29
基金項目:江蘇省自然科學基金(BK20190491);中央高校基本科研業務費項目(2018B57414)
作者簡介:紀?歷(1984—),男,博士,研究方向為電力電子與電力傳動。
通信作者:紀?歷
Vibration?mechanism?analysis?of?magnetic?levitation?rotor?system?for?low?temperature?waste?heat?power?generation
JI?Li
(College?of?Energy?and?Electrical?Engineering,HOHAI?University,?Nanjing?210098,?China)
Abstract:
By?using?high?speed?maglev?generator,?the?efficiency?of?low?temperature?waste?heat?generation?system?were?improved?significantly.?The?unbalanced?magnetic?pull?(UMP)?in?the?maglev?generator?caused?by?dynamic?and?static?eccentricity?was?calculated?theoretically,?and?the?analytical?expression?of?the?UMP?was?obtained?based?on?Maxwell?stress?tensor?method.?Then,?the?vibration?of?a?maglev?rotor?system?under?the?action?of?the?UMP?and?the?mass?unbalance?force?was?analyzed?by?the?numerical?method.?Lastly,?the?effects?of?different?eccentricities,?torque?angles?and?loads?on?the?rotor?vibration?were?discussed?in?detail.The?conclusions?for?the?maglev?rigid?rotor?system?are?useful?for?the?future?research.
Keywords:low?temperature?waste?heat?power?generation;?magnetic?levitation?rotor;?unbalanced?magnetic?pull;?rotor?eccentricity;?permanent?magnet?synchronous?machines
0?引?言
現有低溫余熱發電設備通常采用“透平機—減速箱—發電機”的形式,由傳動、支撐系統造成的損耗高達整機功率的10%,以至設備普遍存在發電效率低、成本高、體積大等不足,經濟性不高,未能形成規模。借鑒磁懸浮航空發動機相關技術,開發磁懸浮高速透平發電機設備,無需機械軸承、變速箱及其附屬的潤滑和供油系統,相對于現有設備能夠提高效率10%~15%。這對于發展我國高端制造業以及提倡低碳環保的國家政策都具有重要意義[1-4]。
然而磁懸浮軸承剛度遠低于一般機械軸承[5],在轉子高速旋轉時存在較大的動態偏心量從而引發電機不平衡拉力,而該不平衡拉力與轉子質量不平衡力以及磁懸浮軸承的控制力共同作用將導致發電機轉子發生復雜的振動情況,如果不加以處理可能導致整個磁懸浮系統失穩崩潰。因此,有必要研究磁懸浮發電機轉子的振動機理。
現有研究對于偏心情況下轉子振動特性的分析偏重于常規電機。如文獻[6]研究了靜、動態偏心對電機磁感應強度、輸出轉矩、損耗方面的影響,得到了許多有價值的結論。文獻[7]根據有限元分析的結果應用RBF神經網絡方法建立了徑向不平衡力模型。文獻[8]考慮了靜止偏心與振動偏心同時存在的情況,建立了永磁轉子的動力學模型。文獻[9]基于有限元軟件計算了大型永磁電機轉子的不平衡響應并對電機的振動特性進行了分析。文獻[10]應用正則攝動理論建立了永磁轉子偏心氣隙磁場的解析模型,并計算了空載情況下的不平衡拉力。但是對于磁懸浮電機,這方面的研究較少,文獻[11]研究了磁懸浮剛性轉子系統的振動機理,并建立了其動力學模型,但是文中沒有考慮到電機不平衡拉力的影響。文獻[12]通過有限元軟件研究了不平衡拉力對轉子振動以及磁懸浮軸承剛度的影響,得到了許多有價值的結論,但是文中結論是基于特定機型的有限元的分析,沒有得到力矩的解析模型。文獻[13-14]考慮磁路飽和建立了無軸承開關磁阻電機徑向電磁力模型,但沒有考慮不同偏心情況對不平衡拉力以及轉子振動的影響。文獻[15]根據虛位移法建立了無軸承永磁電機的徑向力模型,但是推導過程中忽略了轉子動態偏心的影響。
綜上所示,現有文獻對于磁懸浮電機轉子軸系振動特性的研究并不完善。本文以磁懸浮高速永磁發電機為對象,綜合考慮磁懸浮轉子靜、動態偏心情況,結合麥克斯韋應力法與等效磁路法推導了電機不平衡拉力的解析模型,并結合轉子質量不平衡激勵以及磁懸浮軸承的控制反力研究轉子的力矩耦合與振動情況,所得研究結論可以為抑制磁懸浮發電機轉子振動提供理論依據。
1?永磁電機不平衡拉力的數學模型
由于加工和裝配的誤差導致磁懸浮軸承定子的中心、磁懸浮位移傳感器的測量中心、磁懸浮保護軸承[16]中心以及電機定子中心不在一條直線上,而根據磁懸浮軸承的工作原理,靜態時轉子將懸浮于保護軸承的中心,這導致電機定、轉子之間存在初始的靜態偏心。同時由于磁懸浮軸承的支承剛度相對較小,當轉子高速轉動時會繞其幾何對稱軸與慣性主軸之間的一條軸線旋轉,產生動態偏心。此時,轉子質心截面的示意如圖1所示。
圖中O為電機定子的中心,O1為磁懸浮保護軸承的中心,O′1為轉子的幾何中心;δ0是名義氣隙長度;d0和γ0為只考慮靜態偏心時的初始偏心量和偏心角度;d和γ為考慮動態偏心后的實際轉子偏心量和偏心角度;x和y為轉子幾何中心相對于磁懸浮中心水平和豎直方向的偏移量。(文中假定x方向與定子A軸方向相同)
由于轉子半徑遠大于轉子中心偏移量,則任意角度θ處的氣隙長度可近似表達為:
δ(θ)≈δ0-dcos(θ-γ)。(1)
式中的偏心量和偏心角度均可表示為x和y的函數形式。
d=(d0cosγ0+x)2+(d0sinγ0+y)2,(2)
tanγ=d0sinγ0+yd0cosγ0+x。(3)
根據文獻[17],電機任意氣隙處的磁導率可以被處理為一個傅里葉級數的形式:
Λ(θ)=μ0dSδ(θ)=μ0dSδ0[1-εcos(θ-γ)]=
dS∑∞n=0Λncosn(θ-γ)。(4)
式中:dS為單位角度θ所對應的磁極面積;ε是相對偏心量,ε=d/δ0。系數Λn如式(5)所示:
Λn=μ0δ01-ε2,n=0,
2μ0δ01-ε21-1-ε2εn。n>0。(5)
根據永磁電機的運行原理,在負載情況下,電機內部的磁動勢包括永磁體等效磁動勢Fj與電樞磁動勢Fs兩部分,兩個磁動勢在穩態時保持同步,且在不同的控制策略下呈現不同的相位差。則氣隙中的合成磁動勢可以表示為:
F(θ)=Fj(θ)+Fs(θ)=
Fj0cos(α-pθ)+Fs0cos(α-pθ-λ)。(6)
式中:p為磁極對數;Fj0與Fs0分別表示定、轉子磁動勢的基波幅值;α為任意時刻轉子d軸與定子A軸的相對電角度,其頻率等于發出電能的頻率ωe=pωr;λ為定、轉子磁動勢的夾角(轉矩角),其與電機的控制策略有關。
忽略鐵磁材料的磁勢,根據等效磁路法,得到任意角度θ處氣隙的磁感應強度的表達式為
B(θ)=Λ(θ)F(θ)S=
F(θ)∑∞n=0Λncosn(θ-γ)。(7)
根據麥克斯韋應力法的基本公式,忽略氣隙磁導級數中的高次項,在計算中只保留前4項,則在一對極的情況下,轉子在x和y方向上受到的電磁不平衡拉力如式(8)所示,式中μ0為真空磁導率,kn為不平衡拉力系數,見式(9)。
fump_x=LRπ8μ0[k1cosγ+k2cos(γ+λ)+
k3cos(γ-λ)+k4cos(2α-γ)+
k5cos(3γ-2α)+k6cos(2α-γ-λ)+
k7cos(2α-γ-2λ)+
k8cos(3γ-2α+2λ)+
k9cos(3γ-2α+λ)],
fump_y=LRπ8λ0[k1sinγ+k2sin(γ+λ)+
k3sin(γ-λ)+k4sin(2α-γ)+
k5sin(3γ-2α)+k6sin(2α-γ-λ)+
k7sin(2α-γ-2λ)+
k8sin(3γ-2α+2λ)+
k9sin(3γ-2α+λ)]。(8)
k1=4F2j0Λ0Λ1+2F2j0Λ1Λ2+2F2j0Λ2Λ3+4F2s0Λ0Λ1+2F2s0Λ1Λ2+2F2s0Λ2Λ3,
k2=4Fj0Fs0Λ0Λ1+2Fj0Fs0Λ1Λ2+2Fj0Fs0Λ2Λ3,
k3=4Fj0Fs0Λ0Λ1+2Fj0Fs0Λ1Λ2+2Fj0Fs0Λ2Λ3,
k4=2F2j0Λ0Λ1+F2j0Λ1Λ2+F2j0Λ2Λ3,
k5=2F2j0Λ0Λ3+F2j0Λ1Λ2,
k6=4Fj0Fs0Λ0Λ1+2Fj0Fs0Λ1Λ2+2Fj0Fs0Λ2Λ3,
k7=2F2s0Λ0Λ1+F2s0Λ1Λ2+F2s0Λ2Λ3,
k8=2F2s0Λ0Λ3+F2s0Λ1Λ2,
k9=4Fj0Fs0Λ0Λ3+2Fj0Fs0Λ1Λ2。(9)
從上式可以看出,負載情況下轉子受到的不平衡拉力非常復雜。常規電機中靜態偏心量占主導地位,因此若忽略動態偏心量(即d和γ為定值),此時不平衡拉力包含3個方向固定的力矢量;3個兩倍頻正序分量以及3個兩倍頻負序分量。然而磁懸浮轉子運行時存在較大動態偏心,轉子的偏心角度并不固定,而是與轉速同頻的旋轉,因此設α=ωrt;γ=ωrt+φ,這里假定初始時刻轉子d軸與定子A軸重合,而φ表示定子A軸與偏心位置的初始相位差。將其帶入式(8)不難看出穩態時磁懸浮轉子受到的不平衡力中所有9項均為與轉速同頻的正序分量,因此總的不平衡拉力呈現出與轉速同頻且同向的旋轉力矢量,但其幅值與相位并不確定,取決于偏心量、轉矩角(取決于負載情況以及電機控制策略)、磁動勢與偏心角度的初始相差等多個因素。
由于式(8)過于復雜難以求解,有必要對其進行簡化,為保證結論具有普遍性,對式中的各個分量進行定性的分析。在不同的偏心率與負載率的情況下分析各個分力的大小,得到的曲線如圖2所示。
不難看出在整個負載范圍以及10%偏心率以內系數k5、k8、k9的幅值極其微小,因此在分析振動情況時式(8)中的第5、8、9項可以忽略不計。而式(8)中第2、3兩項系數相同,且相位關于γ對稱,可以與第1項一起合成為一個與偏心方向同向的力矢量;第4、6、7三項均與未知角度φ相關,因此可以將其合成看作一個與偏心方向不同向的同頻分量,且該分量的相位隨負載以及偏心情況的改變而改變。
2?考慮不平衡拉力的磁懸浮轉子動力學建模
圖3給出磁懸浮發電機轉子軸系的結構簡圖。其由磁懸浮轉子、發電機定子、磁懸浮軸承、位移傳感器以及保護軸承等部分組成。圖中,A、B為徑向磁懸浮軸承的支承位置,xA、xB分別為對應x方向徑向磁懸浮軸承處的位移,OC為轉子形心。空間坐標系及其正方向如圖中箭頭所示。
1—透平機葉輪;2—徑向磁懸浮軸承A;3—發電機定子;4—磁懸浮轉子;5—徑向磁懸浮軸承B;6—徑向位移傳感器;7—保護軸承。
可以看出,正常工作時,磁懸浮轉子在徑向上受到質量不平衡力、電機不平衡拉力以及磁懸浮軸承控制力的共同作用。首先,磁懸浮軸承的控制力fmb在工作點附近可以看做是關于位移和控制電流的線性函數[4]:
fmb=kdd+kii。(10)
式中d為轉子在某方向的偏心位移;i為磁懸浮軸承的控制電流;kd表示該磁懸浮軸承的位移剛度;ki為電流剛度。控制電流i則由磁懸浮控制系統根據偏心位置大小以及特定的控制策略計算,考慮磁懸浮控制一般采用PID控制策略,i的表達式如下:
i=(-d)GPIDGA。(11)
式中GA為磁懸浮系統功率放大器的傳遞函數,若功放的帶寬足夠大可以看做是一個比例環節。
電機不平衡拉力fump如式(8)所示。而質量不平衡力fubm在x軸、y軸上分量可以表示為
fubm_x=m(ep-Δd)ω2rcos(ωrt+φ),
fubm_y=m(ep-Δd)ω2rsin(ωrt+φ)。(12)
式中,ep為轉子偏心距(質心到形心的距離),Δd=x2+y2為形心到旋轉中心的距離,即動態偏心量,φ為質量不平衡力的相位。
根據式7~式10以及轉子動力學的基本原理,可以建立徑向磁懸浮剛性轉子系統的動力學模型:
Mx··+Gx·=Kdx+Kii-Efub。(13)
式中,x=[xA,xB,yA,yB]T為磁懸浮轉子在A、B軸承處相對于平衡位置的位移量;i為磁懸浮軸承的控制電流矩陣;fub表示不平衡激勵,主要包括質量不平衡力fubm與電磁不平衡拉力fump;M為廣義質量矩陣;G為陀螺矩陣;Kd為磁懸浮位移剛度矩陣;Ki為磁懸浮電流剛度矩陣;E為不平衡激勵響應系數矩陣。
3?結果分析
3.1?電機不平衡拉力的計算結果分析
文中以一臺100?kW的磁懸浮高速永磁發電機為對象對磁懸浮轉子受到不平衡拉力及其振動情況進行研究,該發電機的主要設計參數見表1。
首先,根據計算的結果分析空載時磁懸浮電機不平衡電磁拉力的情況,如圖4所示。圖4(a)、圖4(b)為忽略靜態偏心,動態偏心幅值為0.1?mm時轉子的受力情況,其中4條曲線分別表示了在4種不同的初始動偏心角度下轉子x在方向受到的不平衡拉力,曲線1~4對應初始動偏心角φ=0°、30°、60°、90°的情況,此時不平衡拉力的幅值分別為:60.0?N、54.7?N、35.2?N、20.3?N。可以看出空載情況下,轉子受到的不平衡拉力不僅取決于偏心量,同時與偏心位移與轉子磁動勢位置的夾角有一定的關系,在相同的動偏心量情況下,若轉子磁動勢位置與偏心位置相同(φ=0°),則轉子受到的不平衡拉力最大,且該拉力的相位與轉子的動不平衡相位相同。若轉子磁動勢的相位與偏心相位不同則不平衡拉力的幅值減小,且相位發生偏移,當轉子磁動勢方向與偏心方向垂直時(φ=90°),不平衡拉力的幅值最小。將x、y方向的不平衡拉力合成為矢量形式,如圖4(b),可以看出,在只有動態偏心的情況下不平衡拉力矢量軌跡為圓形,x、y方向受到的不平衡拉力幅值始終相同,轉子磁場方向與偏心方向的相差只影響不平衡力的幅值和相位,而不會使合力的軌跡發生畸變。
圖4(c)、圖4(d)為同時考慮靜態偏心(幅值0.02?mm)與動態偏心(幅值0.1?mm)時轉子受不平衡拉力的情況,圖中曲線1~3分別對應靜偏心角度γ0=0°、45°、90°時的情況,為驗證靜偏心的影響,此時設置初始動偏心角φ=0°。可以看出隨γ0改變,拉力的幅值變化并不大,但是其波形出現了直流分量,如圖4(c)對應x方向的受力情況,曲線1~3的均值分別為6.25?N、4.5?N、3×10-15?N,可見靜偏心量位于全部位于x方向時,Fx偏移量最大,而當靜態偏心完全位于y方向時,x方向不受影響,正負半周對稱。而y方向的情況則與之相反。可以得出結論,靜態偏心將會使轉子受到的不平衡拉力產生偏移,偏移的方向與靜偏心的方向相同。
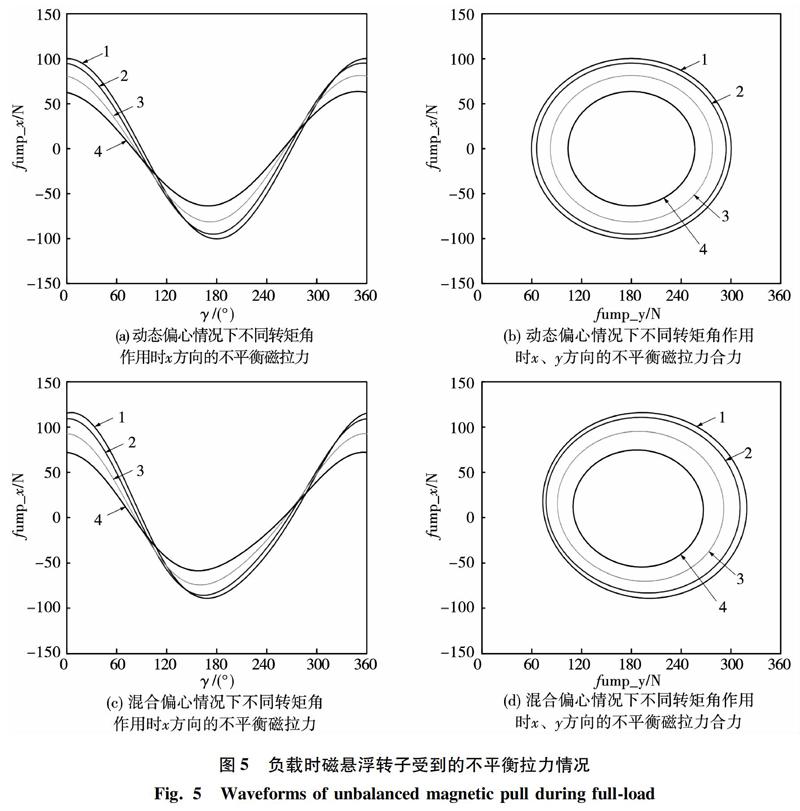
負載時磁懸浮轉子的受力情況如圖5所示。圖5(a)、圖5(b)為只考慮動態偏心(0.1?mm),且初始相差角φ=0°時轉子受到不平衡拉力的情況。考慮到不同的電機控制策略的影響,最終反映在定、轉子轉矩角不同。文中計算了4種情況,對應圖5(a)中曲線1~4表示定轉子轉矩角λ為0°、30°、60°、90°時轉子x方向受到的不平衡拉力,其幅值分別為100.3?N、95.1?N、81.4?N、63.6?N。可以看出雖然4中情況下定轉子磁動勢的幅值相同,但是轉矩角的差異同時影響了不平衡拉力的幅值和相位。當轉矩角為零時,轉子受到的不平衡拉力幅值最大,而隨著轉矩角的增大,轉子受到的不平衡力逐漸減小,且相位也隨之發生變化,當轉矩角為90°時,轉子受到的不平衡拉力最小。
圖5(c)、圖5(d)為同時考慮靜態偏心(幅值0.02?mm,靜偏心角度γ0=45°)與動態偏心(幅值0.1?mm)時不平衡拉力的情況。圖中曲線1~4的定義與圖5(a)、圖5(b)中相同。可以看出,首先,與空載時相同,轉子受到的不平衡拉力沿x、y軸的正方向發生了偏移,且其幅值的變化情況與圖5(a)、圖5(b)相同,轉矩角為零時拉力最大,為90°時拉力最小。
通過空載與負載兩種情況下對不平衡拉力的分析可以得到以下的結論:①初始相差φ對不平衡拉力有較大影響,當φ=0°時,轉子受到的不平衡拉力最大,而φ=90°時,不平衡拉力的幅值最小;②較小的靜態偏心對不平衡拉力幅值的影響不大,但會使得其出現直流分量,且該直流分量的大小與靜態偏心量幅值成正比,方向與靜態偏心方向相同;③轉矩角λ對不平衡拉力具有較大影響,在其他條件相同的情況下,λ=0°時,轉子受到的不平衡拉力幅值最大,λ=90°時,轉子受到的不平衡拉力最小。
3.2?磁懸浮轉子振動情況分析
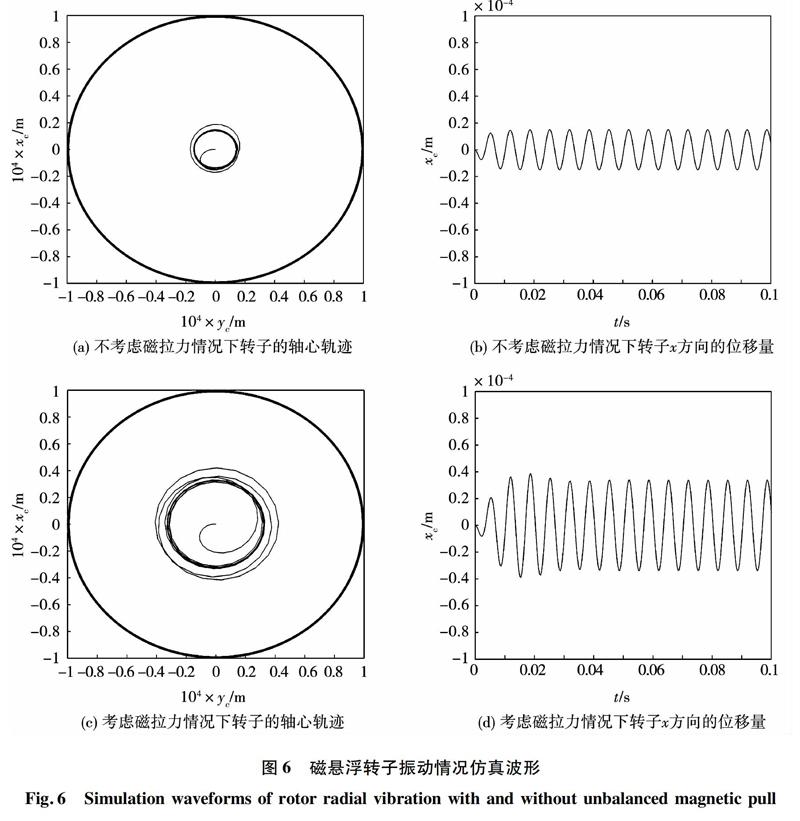
文中第2節推導出考慮不平衡激勵的磁懸浮轉子動力學建模如式(11)所示,其滿足阻尼系統在簡諧力作用下的受迫振動形式。以表1中的所述磁懸浮發電機為對象,設定轉速9?000?r/min、轉子偏心距ep=10?μm,求解式(11),模擬轉子實際的振動情況,得到的仿真結果如圖6所示。
圖6(a)、圖6(b)為只考慮質量不平衡力時轉子的軸心軌跡以及轉子在x方向的振動波形。圖6(a)中外圈表示轉子極限的振動范圍(0.1?mm),超過這一數值則轉子將會與保護軸承產生碰撞。從圖中可以看出,在當前轉速下,若只有質量不平衡力作用,則轉子振動幅值較小,穩定后只有15?μm。圖6(c)、圖6(d)為質量不平衡力與電磁不平衡拉力共同作用時轉子的軸心軌跡以及轉子在x方向的振動波形。可以看出計及不平衡拉力后,轉子振動的幅值明顯增加,穩定后達到了34?μm,比只考慮質量不平衡力時增大了一倍有余。可見,電磁不平衡拉力對磁懸浮轉子振動的影響不容忽視。
4?試驗驗證
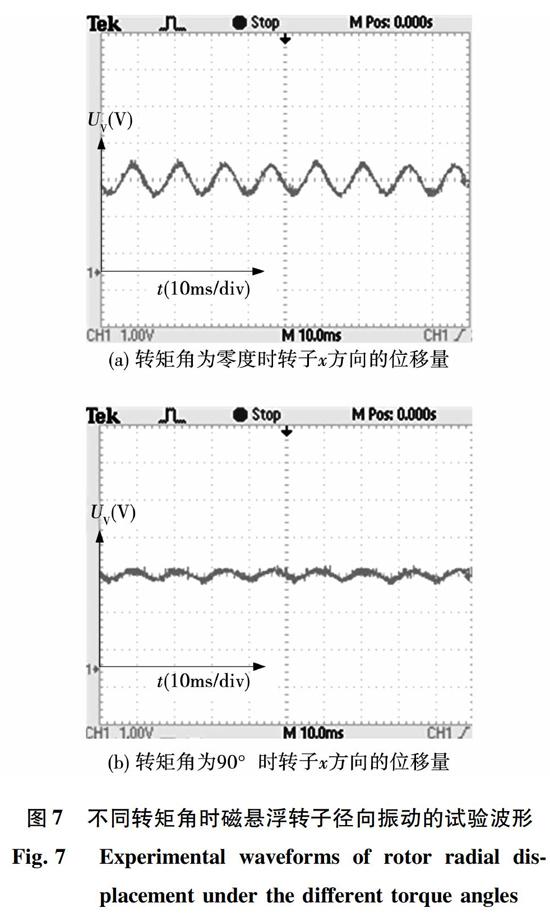
為驗證結論的正確性,文中以一臺100?kW的磁懸浮永磁發電機為對象進行了試驗研究,其主要參數如表1所示。由于不平衡拉力難以測試,試驗主要考察電機在不同轉矩角時不平衡力對轉子懸浮性能的影響。試驗中使用變頻器將電機拖動到4?800?r/min的轉速,此時通過矢量控制算法調整電機的轉矩角λ并觀測轉子的振動情況,如圖7所示。
圖7為磁懸浮轉子徑向振動的波形,圖7(a)中電機的轉矩角接近零度,電樞電流大量作用于轉子d軸,此時徑向位移傳感器檢測到的振動信號頻率為80?Hz、峰峰值為1.04?V,對應傳感器的測量精度20?V/mm,可知在當前轉速下,轉子在受到質量不平衡力和不平衡拉力的共同作用下產生了與轉速同頻的受迫振動,振動的幅值為26?μm。在相同的轉速和同樣的磁懸浮控制參數下,調整變頻器矢量控制算法,將轉矩角調整為90°,轉子振動的波形如圖7(b)所示,此時轉子振動的幅值減小為12?μm,僅為圖7(a)中的46.15%。考慮到兩次試驗的轉速和磁懸浮軸承的控制參數相同,即圖7(a)、圖7(b)中轉子受到的質量不平衡力和磁懸浮軸承的支撐特性完全相同,而轉子的振動情況卻發生了很大變化,證明磁懸浮轉子確實受到了電磁不平衡拉力的影響,且情況與第3節中理論分析結果一致,轉矩角越小,不平衡拉力的影響越大。
5?結?論
本文以磁懸浮高速永磁發電機為對象,研究了磁懸浮轉子受到的電磁不平衡拉力及其軸系的徑向振動情況。文中根據等效磁路法和麥克斯韋張力法推導了該不平衡拉力的解析表達式,并通過計算、仿真及試驗對影響不平衡拉力的主要因素進行了詳細分析。通過研究本文可以得到以下結論:
(1)在動態偏心占主導的磁懸浮電機中,永磁轉子受到的不平衡電磁拉力表現為一個與轉速同頻且同向的旋轉力矢量,其幅值與相位取決于偏心量、定轉子轉矩角λ以及轉子磁動勢與偏心角度的初始相差φ等多個因素;
(2)空載情況下,初始相差φ對不平衡拉力有較大影響。在偏心量幅值相同的前提下,若φ=0°,則轉子受到的不平衡拉力最大,且該拉力的相位與轉子的動不平衡位移位相同。當φ=90°,不平衡拉力的幅值最小;
(3)負載情況下,不平衡拉力受到轉矩角λ的影響。在定、轉子磁動勢幅值相等的條件下,若λ=0°,則轉子受到的不平衡拉力幅值最大。而隨著λ角度增大,轉子受到的不平衡拉力逐漸減小,且相位也隨之發生變化,當λ=90°時,轉子受到的不平衡拉力幅值最小;
(4)仿真和試驗證明,電磁不平衡拉力對磁懸浮轉子振動有較大影響,不容忽視,而通過調整電機控制策略能夠有效的減小該不平衡拉力。
參?考?文?獻:
[1]?RANA?S,?ORRB,?IQBAL?A,?et?al.?Modelling?and?optimization?of?lowtemperature?waste?heat?thermoelectric?generator?system?[J].?Energy?Procedia,?2017,110:?196-201.
[2]?CHIAROTTIU,?MOROLI?V,?MENCHETTI?F,?et?al.?Development?of?a?small?thermoelectric?generators?prototype?for?energy?harvesting?from?low?temperature?waste?heat?at?industrial?plant?[J].?Journal?of?Nanoscience?&?Nanotechnology,?2017,?17(3):?1586-1591.
[3]?王正,?崔超.?基于有機朗肯循環的低溫余熱發電系統設計與分析[J].?電力與能源,?2013,?34(4):?321-324.
WANG?Zheng,?CUI?Chao.?Design?and?analysis?on?lowtemperature?waste?heat?power?generation?using?organic?rankine?cycle?[J].?Power?&?Energy,?2013,?34(4):?321-324.
[4]?JI?L,?XUL,?JIN?C.?Research?on?a?low?power?consumption?sixpole?heteropolar?hybrid?magnetic?bearing?[J].?IEEE?Transactions?on?Magnetics,?2013,?49(8):?4918-4926.
[5]?GAOH,?XU?L.?Realtime?feedforward?force?compensation?for?active?magnetic?bearings?system?based?on?H∞?controller?[J].?Chinese?Journal?of?Mechanical?Engineering,?2011,?24(1):?58-66.
[6]?孔漢,?劉景林.?永磁伺服電機轉子偏心對電機性能的影響研究[J].?電機與控制學報.?2016,?20(1):?52-59.
KONG?Han,?LIU?Jinglin.?Study?of?rotor?eccentricity?effect?on?permanent?magnet?servo?motor?performance?[J].?Electric?Machines?and?Control?2016,?20(1):?52-59.
[7]?修杰,?王世宇.?轉子偏心時雙凸極永磁開關磁阻電機徑向力靜態特性分析及其RBF神經網絡建模[C]//第25屆中國控制與決策會議.?2013,?貴陽,?中國:?5174-5179.
XIU?Jie,?WANG?Shiyu.?DSPM?radial?force?static?characteristic?analysis?and?RBF?NN?modeling?under?rotor?eccentric?[C]//?The?25th?Chinese?Control?and?Decision?Conference?(CCDC).?2013,?Guiyang,?China:?5174-5179.
[8]?岳二團,?甘春標,?楊世錫.?氣隙偏心下永磁電機轉子系統的振動特性分析[J].?振動與沖擊,?2014,?33(8):?29-34.
YUE?Ertuan,?GAN?Chunbiao,?YANG?Shixi.?Vibration?characteristics?analysis?of?a?rotor?for?a?permanent?magnet?motor?with?airgap?eccentricity?[J].Journal?of?Vibration?and?Shock,?2014,?33(8):?29-34.
[9]?姜新通,?李偉凱,?陳言,?等.?低速直驅式大功率永磁同步電動機振動特性研究[J].?電機與控制學報.?2017,21(7):?73-77.
JIANG?Xintong,?LI?Weikai,?CHEN?Yan,et?al.?Vibration?characteristics?research?for?the?low?speed?direct?drive?high?power?PMSM?[J].?Electric?Machines?and?Control,?2017,21(7):?73-77.
[10]?李琛,?章躍進,?周曉燕,等.?定子開槽表貼式永磁電機轉子偏心空載氣隙磁場全局解析法[J].?電機與控制學報.?2014,?18(10):?27-35.
LI?Chen,?ZHANG?Yuejin,?ZHOU?Xiaoyan,?et?al.Exact?analytical?solution?of?opencircuit?airgap?magnetic?field?for?slotted?surfacemounted?permanentmagnet?motors?with?rotor?eccentricity?[J].Electric?Machines?and?Control,?2014,?18(10):?27-35.
[11]?房建成,?張會娟,?劉虎.?磁懸浮剛性轉子系統振動機理分析與動力學建模[J].?控制理論與應用.?2014,?31(12):?1707-1713.
FANG?Jiancheng,?ZHANG?Huijuan,?LIU?Hu.?Vibration?mechanism?analysis?and?dynamic?model?development?of?magnetically?suspended?rigid?rotor?system?[J].?Control?Theory?&?Applications.?2014,?31(12):?1707-1713.
[12]?HAN?B,?ZHENG?S,?LIU?X.?Unbalanced?magnetic?pull?effect?on?stiffness?models?of?active?magnetic?bearing?due?to?rotor?eccentricity?in?brushless?DC?motor?using?finite?element?method?[J].?Mathematical?Problems?in?Engineering.?2013:?1-10.
[13]?楊艷,?鄧智泉,?曹鑫,?等.?無軸承開關磁阻電機徑向電磁力模型[J].?電機與控制學報,?2009,?13(3):?377-382.
YANG?Yan,?DENG?Zhiquan,?CAO?Xin,et?al.?Magnetic?radial?force?model?of?bearingless?switched?reluctance?motor?[J].?Electric?Machines?and?Control?2009,?13(3):?376-382.
[14]?曹鑫,?鄧智泉,?楊鋼,?等.?無軸承開關磁阻電機麥克斯韋應力法數學模型[J].?中國電機工程學報.?2009,?29(3):?78-83.
CAO?Xin,?DENG?Zhiquan,?YANG?Gang,et?al.?Mathematical?model?of?bearingless?switched?reluctance?motors?based?on?maxwell?stress?tensor?method?[J].?Proceedings?of?the?CSEE.?2009,?29(3):?78-83.
[15]?孫曉東,?陳龍,?楊澤斌,?等.?考慮偏心及繞組耦合的無軸承永磁同步電機建模[J].?電工技術學報,?2013,28(3):?63-70.
SUN?Xiaodong,?CHEN?Long,?YANG?Zebin,?et?al.?Modeling?of?a?bearingless?permanent?magnet?synchronous?motor?considering?rotor?eccentricity?and?coupling?relationship?of?windings[J].?Transactions?of?China?Electrotechnical?Society,?2013,28(3):?63-70.
[16]?ZHU?Y,?JIN?C,?XU?L.?Dynamic?response?of?rotor?drops?onto?doubledecker?catcher?bearing?[J],?Chinese?Journal?of?Mechanical?Engineering.?2013,?26?(1):?104-113.
[17]?GUOD,?CHU?F,?CHEN?D.?The?unbalanced?magnetic?pull?and?its?effects?on?vibration?in?a?threephase?generator?with?eccentric?rotor?[J].Journal?of?Sound?and?Vibration,?2002,?254(2):?297-312.
(編輯:劉素菊)