永磁同步電機位置伺服系統改進自抗擾控制
2019-01-22 04:39:46邱建琪留若宸
電機與控制學報 2019年11期
關鍵詞:永磁同步電機
邱建琪 留若宸

摘?要:為使分布式永磁同步電機伺服系統能夠在長控制周期、長延時的應用場景中獲得良好的位置伺服效果,提出了一種改進的自抗擾控制算法(ADRC)。針對經典ADRC參數眾多、物理意義不明確的問題,結合電機控制模型進行分析,得到了一套工程上可行的參數整定方法。同時,基于電機控制系統的特點,對經典ADRC中的擴張觀測器進行改進,提高了觀測收斂的效率。仿真和實驗結果表明,相比傳統方法,本文提出的改進的自抗擾控制器具有更強的魯棒性、更好的動態性能。
關鍵詞:自抗擾控制;永磁同步電機;參數整定;改進擴張觀測器;時滯系統
DOI:10.15938/j.emc.2019.11.006
中圖分類號:TM?351
文獻標志碼:A
文章編號:1007-449X(2019)11-0042-09
收稿日期:?2019-04-16
基金項目:國家自然科學基金(51837010)
作者簡介:邱建琪(1974—),男,博士,副教授,研究方向為永磁電機及其控制;
留若宸(1995—),男,碩士研究生,研究方向為永磁電機控制。
通信作者:邱建琪
Improved?active?disturbance?rejection?control?for?permanent?magnet?synchronous?motor?position?servo?system
QIU?Jianqi,?LIU?Ruochen
(College?of?Electrical?Engineering,?Zhejiang?University,?Hangzhou,?310027,?China)
Abstract:
For?the?distributed?permanent?magnet?synchronous?motor?servo?system,inorder?to?get?good?position?servo?performance?in?the?scene?of?long?control?period?and?long?delay,?an?improved?active?disturbance?rejection?control?(ADRC)?was?proposed.?To?solve?the?problem?of?classical?ADRC?which?has?too?many?parameters?whose?physical?meaning?is?unclear,?a?set?of?feasible?parameter?setting?method?was?presented?based?on?the?motor?control?model.?At?the?same?time,?the?extended?state?observer?in?the?classical?ADRC?was?used?to?improve?the?efficiency?of?observation?convergence.?Finally,?simulation?and?experimental?results?show?that?the?improved?ADRC?proposed?has?stronger?robustness?and?better?dynamic?performance?than?the?traditional?method.
Keywords:active?disturbance?rejection?control;?permanent?magnet?synchronous?motor;?parameter?setting;?improved?extended?observer;?time?delay?system
0?引?言
永磁同步電機(permanent?magnet?synchronous?motor,PMSM)憑借其響應快、功率密度大、易于控制等優點,?廣泛使用于各種電力驅動場合。雖然基于永磁同步電機的伺服系統已經發展多年,但是為了進一步增強系統的魯棒性、快速性、精準度,近幾年仍有一些先進的控制算法被提出。文獻[1]在面向重復作業伺服系統的迭代學習過程中加入積分反饋與前饋控制實現了對當前擾動更快的應對,增強了系統的魯棒性,實現了更精確的位置跟蹤。文獻[2]通過徑向基(RBF)神經網絡實現對永磁同步電機狀態變量的跟蹤,通過障礙李雅普諾夫函數(barrier?lyapunov?functions)對全狀態進行了限幅,并證明了該算法的穩定性,但是僅在仿真系統中實現了良好位置伺服效果。文獻[3]利用離散終端滑模控制律提高了永磁直線電機的位置跟蹤性能。文獻[4]利用有限集模型預測算法,在參數和工況未知或時變的情況下實現了永磁電機的高性能控制。
自1975年Honeywell開發出第一套商用的分布式控制系統以來,如今國內外已有幾十家公司開發出了上百款產品,電機作為工業界核心機電能量轉換機構逐漸被大量使用于分布式控制系統中[5]。隨著近幾年多軸機械臂、工業機器人、精密加工等研究的興起,對電機分布式控制的位置精度[6]提出了更高的要求。然而由于通信系統的傳輸延時、帶寬等限制,使得此類控制系統往往控制周期較長且數據存在延時,這使得一些常用的位置伺服控制算法性能大幅下降,同時為限制計算延時使得一些復雜的算法亦難以應用。
自抗擾控制(active?disturbance?rejection?control,ADRC)通過實時估計系統的內擾和外擾對控制信號進行補償,將系統整定為積分串聯系統,從而實現高性能的控制[7]。由于不依賴物理模型的精確性,魯棒性強,自提出以來在電機伺服控制領域已經廣泛使用[8-13],同時也有大量研究證明自抗擾控制對于時滯系統能起到良好的控制效果[14]。
然而經典的自抗擾算法由于參數眾多、物理意義不明確,在工程上使用難度較大。在過去的諸多研究中,對自抗擾控制的實用化研究還是有限的。為使ADRC能更好地應用于永磁電機分布式伺服系統中,本文首先對一類典型的分布式永磁同步電機位置伺服系統進行建模,結合自抗擾控制的算法原理,分析了自抗擾控制算法中各個參數在永磁同步電機位置伺服系統中對應的物理含義,之后根據物理含義給出工程上可行性較高的參數整定策略。此外,為降低擴張觀測器的參數調節難度,提出了一種改進擴張觀測器算法,并在理論上證明了該改進算法在相同參數下較原有算法具有更小的觀測誤差。最后,構建了一套分布式電機位置伺服系統,實驗結果證明了該方法的有效性。
1?位置伺服系統模型
一種典型的分布式位置伺服系統的模型如圖1所示。系統分為上位機運動控制器控制的位置外環、下位機控制的轉速電流內環兩部分,兩環通過標準通信協議進行數據傳遞。對該系統建立一個通用的狀態空間模型,推導如下。
永磁同步電機dq坐標系下電壓、電流、轉矩、轉速、角度方程組如下
Ud=Lddiddt-pnωmLqiq+Rid,
Uq=Lqdiqdt+pnωm(Ldid+ψf)+Riq,
Te=32pn[ψfiq-(Ld-Lq)idiq],
Jdωmdt=Te-TL-Bωm,
dθdt=ωm。(1)
式中:Ud、Uq分別為d、q軸定子電壓;id、iq分別為d、q軸定子電流;Ld、Lq分別為d、q軸電感;R為定子電阻;ψf為永磁體磁鏈;ωm為轉子機械角速度;pn為電機極對數;Te為電磁轉矩;TL為負載轉矩;J為電機轉子轉動慣量;B為摩擦系數;θ為機械角度。
采用id=0的矢量控制時,轉矩公式可以簡化為Te=32pnψfiq。將id=0代入q相電壓電流公式,之后利用PI控制器的表達式可以得到Uq的方程組,最終得到位置伺服系統的全階表達式
dθdt=ωm,
dωmdt=-BJωm+32pnψfJiq-TLJ,
diqdt=-PnψfLqωm-RLqiq+1LqUq,
Uq=Kp2e2+Ki2∫e2,
e2=Kp1e1+Ki1∫e1-iq,
e1=ωref-ωm。(2)
式中:e1、Kp1、Ki1分別為轉速PI環的誤差輸入、增益系數;e2、Kp2、Ki2分別為電流環PI環的誤差輸入、增益系數;ωref為轉速給定值。
由于位置環的控制周期遠大于電流環,兩者解耦,認為位置控制時電流已達到穩態,即diqdt=0,利用這個條件可以消去原式中的iq項實現降階。此外,Uq表達式簡寫為ωref與ωm的非線性函數U(ωref,ωm)?,得到二階系統的表達式
dθdt=ωm,
dωmdt=32p2nψ2fJR-BJωm+
32pnψfJRU(ωref,ωm)-TLJ。(3)
2?改進自抗擾控制器設計
自抗擾控制如圖2所示,主要分為3個模塊:過渡過程、擴張觀測器、非線性反饋。其中過渡過程是將給定參數利用跟蹤微分器等方式提取出系統各階狀態變量的給定,防止給定突變時,給定與系統實際值誤差過大,從而導致反饋出現嚴重超調的現象。擴張觀測器將系統的建模誤差、外擾動等綜合為一個高階狀態變量,利用觀測器實現各階變量的觀察,最終對利用高階狀態變量對擾動進行補償。非線性反饋利用反饋律產生系統的最終輸入,以實現期望的控制效果。自抗擾控制將整個系統整定成一個串行積分器系統,從而獲得精確的控制效果[7]。
然而標準的ADRC參數眾多,而且物理意義模糊,使得參數整定難度較大。本節基于前一節建模的分布式電機位置伺服系統,分析了ADRC參數的含義,對擴張觀測器進行了改進,并設計了一種工程上可行的調參方法。
2.1?ADRC核心思想分析
對于式(3)系統,狀態變量為轉速為ωm以及角度θ,輸出為轉速給定ωref。因此令x1=θ,x2=ωm,u=ωref?,令U(ωref,ωm)中ωref項的線性部分為b0,并對該系統進行擴張,將已建模的參數誤差、未建模的延時誤差、外界的干擾看做一個擾動項,建立一個新的高階狀態變量
x3=32p2nψ2fJR-BJx2+
32pnψfJRU(u,x2)-b0u-TLJ(4)
因此式(3)簡寫為
x·1=x2,
x·2=x3+b0u,
x·3=f(u,x2,TL……)?。(5)
式(4)中f(u,x2,TL……)代表的是各類誤差綜合擾動項。該高階擾動項解析表達式不易推導,很難得到可靠的精確解,但是只要得到x3這個非實際狀態變量的近似觀測值,即可完成擾動的補償。自抗擾控制中的擴張觀測器就是為了獲得這個觀測值。若得到的觀測值足夠接近x3,令u=u0-x3b0,則式(5)系統變為
x·1=x2,
x·2=u0。(6)
整個系統簡化為一個串行積分器,那么只要合理選擇u0就可以使x1=θ=u0得到期望的位置閉環效果。
2.2?過渡過程物理意義及參數整定
標準的二階ADRC采用文獻[15]提出的最速跟蹤函數fhan對輸入信號v進行跟蹤,從而實現變量v1以變量v2的速度跟蹤上信號v的效果。
v·1=v2,
v·2=fhan(v1-v,v2,r,h)。(7)
式中fhan有r與h?2個待調參數,計算過程為:
d=rh,
d0=hd,
y=x1+hx2,
a0=d2+8r|y|,
a=x2+(a0-d)2,|y|>d0
x2+yh,|y|≤d0,
fhan=-rsign(a),|a|>d
-rad,|a|≤d。(8)
根據fhan的最終輸出fhan=-rsign(a),|a|>d
-rad,|a|≤d可以得到|fhan|≤|r|,因此r為fhan的上界。當h的取值為ADRC計算周期時,r的物理意義是v·2的上界,在位置伺服系統中為電機加速度的給定值的上界。
增大r可以減少過渡時間,但如果r太大使得電機無法跟上,則失去了過渡的意義,甚至當實際位置x1未到達給定v時,過渡過程的給定信號遠快于實際狀態量,使得二階給定v2=0,從而導致轉速提前降低,反而減緩了響應速度;如果r太小,過渡時間過長會影響系統的響應速度。為充分發揮過渡過程的性能,r值應略高于電機當前狀態下能夠達到的加速度上限。然而在仿真實驗中發現,若在過渡過程中對fhan的參數進行整定會導致fhan中非線性區域偏移,從而引起過渡過程出現超調,降低過渡過程的品質,因此對r的調整應在過渡過程開始之前,即電機處于靜止狀態時。
可以通過求取或實測電機空載階躍響應達到額定轉速的平均加速度a來確定r的基準值,當電機負載較大時略微減小r,保證電機可以跟上;當電機位置給定突變較小時,可以增大r以提高系統的動態性能。
2.3?改進擴張觀測器
ADRC是否能夠實現精確控制的關鍵在于擴張觀測器(ESO)是否可以精確跟蹤狀態變量。標準的二階ESO形如
e1=z1-x1,
z·1=z2-β01e1,
z·2=z3-β02fal(e1,0.5,h)+b0u,
z·3=-β03fal(e1,0.25,h)。(9)
注意到式(3)中U(ωref,ωm)依據式(2)可以提取出ωref的線性部分3Pnψf2JRKp1Kp2ωref,因此可以令b0=3Pnψf2JRKp1Kp2。
對于本系統而言,x2是轉速,具有實際物理意義,且前述過渡過程中的二階給定v2也是根據轉速給定的物理含義整定得到,因此這里的二階觀測值z2應嚴格跟隨x2。為了獲得二階狀態變量x2更優的觀測效果,將x2與觀測值z2的誤差也輸入到擴張觀測器中。改進后的ESO如下
e1=z1-x1,e2=z2-x2,
z·1=z2-β01e1,
z·2=z3-β02e2+b0u,
z·3=-β03fal(e1,0.25,h)-β04fal(e2,0.5,h)。(10)
式中:e1、z1、x1分別為位置的誤差、觀測值、實際值;e2、z2、x2分別為速度的誤差、觀測值、實際值;z3分別為擾動的觀測值;fal是非線性函數。
fal(ε,α,δ)=|ε|αsign(ε),|ε|>δ
εδ1-α,|ε|≤δ(11)
式中εδ1-α是為了防止ε趨近零時高頻抖動引入的線性過渡。
標準二階ESO系統的觀測誤差為:
e·1=e2-β01e1,
e·2=e3-β02fal(e1,0.5,h),
e·3=-β03fal(e1,0.25,h)-f(u,x2,TL……)。(12)
式中ei=zi-xi,(i=1,2,3),為ESO各階觀測誤差。
常規情況下擾動f(u,x2,TL……)有界,設M≥|f(u,x2,TL……)|,u,x2,TL……
當系統進入穩態時,e·1=e·2=e·3=0有
0=e2-β01e1,
0=e3-β02fal(e1,0.5,h),
M≥|β03fal(e1,0.25,h)|。(13)
當fal(ε,α,δ)=|ε|αsign(ε)時,有M≥|β03|e1|0.25|,從而有
|e1|≤Mβ034,|e2|≤β01Mβ034,|e3|≤β02Mβ032(14)
因此,只要β03足夠大,誤差就能收斂到較小值,ESO可以實現對狀態的觀測[16]。
對于本文提出的改進ESO,當系統進入穩態時有
0=e2-β01e1,
0=e3-β02e2,
M≥|β03fal(e1,0.25,h)+β04fal(e2,0.5,h)|。(15)
當fal(ε,α,δ)=|ε|αsign(ε)時,有
M≥|β03|e1|0.25sign(e1)+
β04|e2|0.5sign(e2)|=
|β03|e1|0.25sign(e1)+
β04β0.501|e1|0.5sign(e1)|=
|β03|e1|0.25+β04β0.501|e1|0.5|≥
|β03|e1|0.25|(16)
因此為達到相同的誤差精度,需要的β03比標準ESO更小。這意味著本文改進的ESO效率更高,參數調節更為容易。同理可證得對β02、β01亦是如此。此外,為調參方便可直接令β04=β03。經過多次實驗、仿真對比可知,上述ESO的穩定裕度很大,只要電機的動態性能在數量級上接近就可以很好地實現跟蹤,即仿真參數可以直接移植到實際系統中。
為驗證改進ESO的觀測性能,在下一節所述的仿真系統中進行對比實驗。在由PI控制器構成的位置伺服系統進行階躍響應實驗,使用標準的ESO與改進ESO分別進行狀態觀測。ESO均采用相同的系數(β01=800,β02=5?000,β02=5?000)。
從圖3中可以看到,改進ESO的誤差明顯小于標準ESO。雖然在位置觀測誤差上,標準ESO已經達到較小的誤差了,但是在轉速觀測上,標準ESO觀測到的轉速并非轉速。這是因為b0u?項僅為控制信號對系統的部分線性輸入,由式(4)可知,u對系統的擾動項x3也存在影響,因而必然存在建模誤差。在標準ESO中追求的是對位置觀測誤差的最小化,因此即使z2→x2不成立,也能通過x3進行補償從而使得z1→x1。由于z2對x2觀測的偏離,使得前述的過渡過程失去意義,且會導致輸入到非線性反饋環節中的二階誤差較大,從而使得非線性反饋調參難度加大。改進ESO能使得z2→x2,輸入信號建模誤差、擾動集中于x3,從而實現更理想的控制效果。
2.4?非線性反饋
標準ADRC的非線性反饋是通過前述的fhan實現的
u0=fhan(v1-z1,c(v2-z2),r,h)(17)
根據前文分析r是fhan的輸出上界,在本系統中對應著轉速給定上界,為保證對內環充分激勵,該值應略大于電機的額定轉速。
c的作用調整轉速誤差與位置誤差的權重,在改進ESO的作用下,二階觀測誤差較小,因而二階誤差輸入較為穩定,所以c往往是一個接近1的數,調節較為容易。根據調參經驗發現,出現超調時增大c,接近給定速度減緩過快時減小c,即可獲得不錯的性能。
2.5?最終表達式
對于分布式電機位置伺服系統而言,由于通信延時、計算導致的延時大約在幾百微秒的數量級,以600?r/min電機為例,延時產生的角度誤差為1°~2°機械角度,為獲得較優的精度需要進行一定的補償,即x1=x1+x2Td,其中Td是利用控制周期間隙發送時間校準包獲得的延時。需要注意的一點是,必須對x1與x2進行單位、幅值的換算,保證x·1與x2為相同數量級,也可進行標幺化,否則會影響ESO的收斂性。
v1=v1+hv2,
v2=v2+hfhan(v1-v,v2,r,h),
h*=h/k,
x1=x1+x2Td,
for(i=1:k){
e1=z1-x1,e2=z2-x2
z1=z1+h*(z2-β01e1)
z2=z2+h*(z3-β02e2+b0u)
z3=z3+h*β03(-fal(e1,0.25,h*)-fal(e2,0.5,h*))
},
u0=fhan(v1-z1,c(v2-z2),r0,h),
u=u0-z3b0。(18)
式中k為觀測器迭代次數,擴張觀測器可以通過多次迭代實現更精確的觀測精度。
3?仿真實驗
本節在Matlab2017B/SIMULINK中進行仿真,比較改進ADRC與傳統控制方法在分布式位置伺服系統的位置控制性能。仿真使用的PMSM主要參數如下:直流母線電壓30?V,定子電阻R=0.09?Ω,定子電感Ld=0.505?mH,Lq=0.565?mH,永磁體磁鏈0.012?8?Wb,極對數5,轉動慣量J=2.2×10-5?kg·m2,摩擦系數B=0.000?3?N·m·s。內環采用標準的id=0轉速電流雙閉環矢量控制。電流環控制周期為80?us,轉速環控制周期為400?us,位置環控制周期為2?ms,轉速限幅700轉,電流限幅2?A,通信延時采用300?us。
本節仿真所指的ADRC為上文所述的改進ADRC。由于基礎的PI控制器難以調節出理想的控制效果,因此本節所指的PI控制器為帶有積分分離的PI控制器。同時,兩者都加入了相同的通信延時補償。
3.1?擾動測試
首先在空載階躍響應中對2種算法進行調參,得到了較為滿意的控制效果。給定的位置信號為3?600°機械角度。
如圖4(a)所示,在空載情況下,PI控制器的上升時間短于ADRC,這是由于啟動初期過渡過程的加速度小于電機能夠達到的加速度上限,因而限制了電機的動態性能。然而隨著電機速度的上升,電機能達到的加速度上限必然降低,因此并不宜進一步調大過渡過程中的r參數。根據圖4(b)可以發現,在接近給定位置角度時,PI控制的上升減緩,而ADRC控制下上升較快。不同于PI控制器小誤差小輸出,ADRC在小誤差時也能有較大的輸出,因而在誤差較小時也能保持良好的動態性能,兩者轉速給定值的輸出對比如圖4(c)所示。最終兩者進入穩態的時間基本相同,可以認為兩者在該參數下性能接近。
在圖4的參數下,進行抗負載擾動能力的測試。在電機中加入如圖5(a)所示的隨機變化的負載擾動。在本節所述的仿真系統中,電機在額定轉速下負載能力極限約為0.25?N·m,因此這里的負載轉矩已經達到了20%-80%的負載極限。
由于負載變化較大,兩者的控制性能均明顯下降,但由圖5(c)可以發現ADRC在隨機轉矩擾動下無超調,進入穩態的時間保持在0.5?s不變,且靜態誤差非常小,然而PI的超調由空載時的無超調升至12.08%,出現了明顯的超調,此外靜態誤差也大于ADRC,性能下降明顯。說明本文所述ADRC控制器具有更好的魯棒性,更適用于負載變動頻繁工況下的位置伺服系統中。
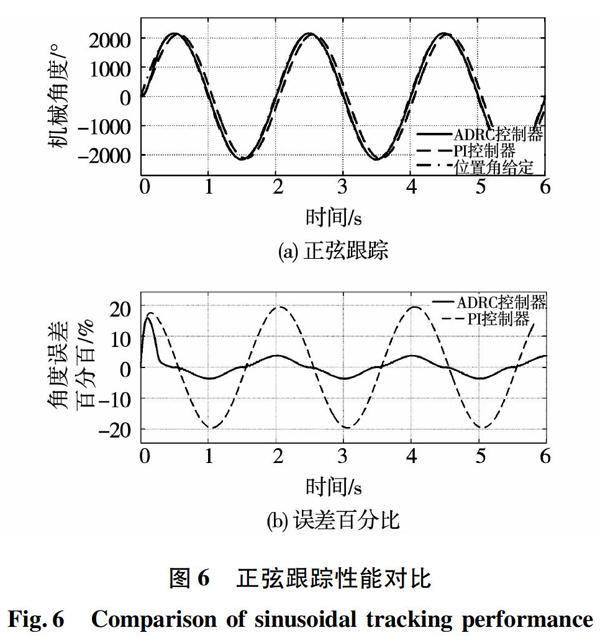
3.2?正弦跟蹤測試
仿真取正弦波幅值為2?160°,周期2秒進行正弦跟蹤測試,控制器參數與4.1節相同。
從圖6(a)可以看出PI控制下出現了0.07s的滯后,且峰值降低了1.62%,而ADRC無滯后,峰值也無差。從圖6(b)誤差曲線可以看出,PI控制器下的最大誤差達到了正弦幅值的19.5%,基本上可以認為難以跟隨正弦曲線,而ADRC控制器的跟隨誤差除了啟動初期較大,之后的最大誤差為3.6%,可以較好跟隨正弦曲線。說明本文所述ADRC控制器具有良好的動態性能與控制精度,更適用于高精度的位置伺服系統。
4?實驗驗證
在實際分布式伺服控制系統中進一步驗證改進ADRC的性能。上位機為DSP28335執行改進ADRC算法,下位機為XILINX?Spartan?3E?XC3S500執行轉速電流雙閉環矢量控制,兩者通過CAN實現通信。開關頻率12.5?kHz,電流環控制周期為80?us,轉速環控制周期為400?us,位置環控制周期為2?ms,限幅700轉。使用DSP中的CPU時鐘計數測得通信延時平均值為312?us,改進ADRC執行時間平均值為35?us。位置信息由絕對式編碼器獲得,分辨率360°/10?000,通過FPGA驅動DAC輸出位置信息至示波器。
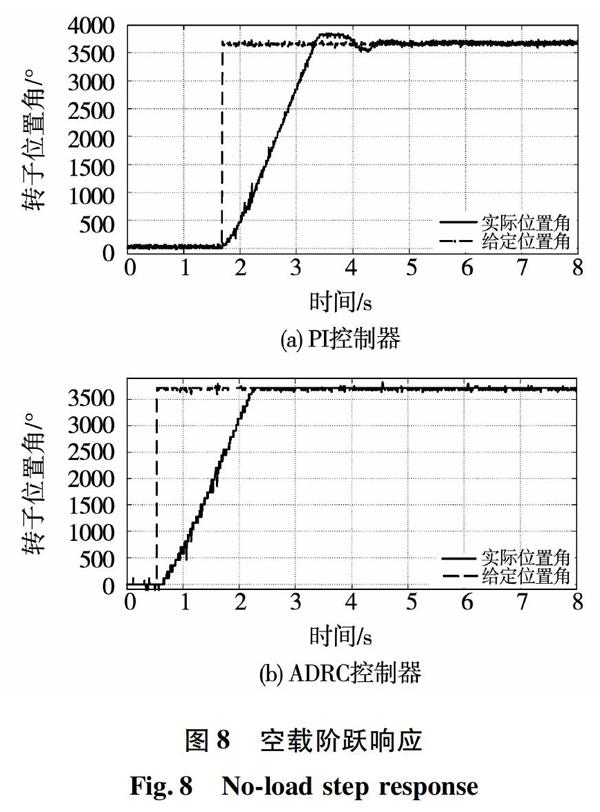
4.1?空載階躍響應
位置給定為3?600°,電機空載啟動。為保證較好的性能,PI控制器采用分段PI控制器。ADRC指的是本文所示的改進ADRC。
整定參數使得兩者都在1.7?s左右達到給定值,但是PI控制器達到給定值之后出現了震蕩,超調達到5.3%,在3?s才最終達到穩定狀態。改進ADRC控制下無超調達到給定值。相比之下改進ADRC具有更好的控制性能。
4.2?正弦跟蹤
為進一步比較動態性能,采用正弦跟蹤實驗。給定的正弦信號幅值1800°,分別在周期為12?s、6?s的情況下進行試驗。
如圖9所示,12?s周期的正弦給定下,PI可以實現正弦跟隨,但是可以看到在正弦的波峰處出現了明顯的跟隨誤差,這是由于波峰處速度較低時,且PI控制器輸出較小,不足以充分激勵內環,從而導致低速時位置精度降低。與此不同的是,改進ADRC依靠轉速、位置的綜合非線性反饋,在低速時也能有良好的位置調節性能,實現良好的正弦跟隨效果。
如圖10所示,當正弦給定的周期變為6?s時,PI控制下的實際位置已經產生了明顯滯后,產生了較大的跟隨誤差。而改進ADRC僅僅出現了略微的超調,依舊保持良好的跟隨性能。由此進一步驗證改進ADRC算法能使系統具有更好的動態性能。
5?結?論
本文提出了一種基于改進擴張觀測器的自抗擾控制算法,并針對傳統自抗擾控制參數整定繁瑣的問題給出了一個工程上可行的整定策略。結合永磁同步電機系統狀態變量的特點,改進了擴張觀測器提高了觀測精度、使得自抗擾控制的參數整定更為容易。通過該改進自抗擾控制算法,實現了長延時、長控制周期的分布式永磁同步電機分布式位置伺服系統的高性能控制。仿真與實驗均證明了該方法的有效性。
參?考?文?獻:
[1]?MANDRA?S,?GALKOWSKI?K,?ROGERS?E,?et?al.?Performanceenhanced?robust?iterative?learning?control?with?experimental?application?to?PMSM?position?tracking?[J].?IEEE?Transactions?on?Control?Systems?Technology,2018,27(4):1813.
[2]?LIU?Y?Y,?YU?J?P,?YU?HS,et?al.?Barrier?lyapunov?functionsbased?adaptive?neural?control?for?permanent?magnet?synchronous?motors?with?fullstate?constraints?[J].?IEEE?Access,2017,5:10382.
[3]?DU?H?B,?CHEN?X?P,?WEN?G?H,et?al.Discretetime?fast?terminal?sliding?mode?control?for?permanent?magnet?linear?motor?[J].?IEEE?Transactions?on?Industrial?Electronics,2018,65(12):9916.
[4]?陳卓易,?邱建琪,?金孟加.?永磁同步電機有限集無參數模型預測控制[J].電機與控制學報,2019,23(1):19.
CHEN?Zhuoyi,?QIU?Jianqi,?JIN?Mengjia.?Finite?control?set?nonparametric?model?predictive?control?for?permanent?magnet?synchronous?machines?[J].?Electric?Machines?and?Control,2019,23(1):19.
[5]?王常力.分布式控制系統(DCS)設計與應用實例[M].北京:電子工業出版社,2016:9-19.
[6]?胡松鈺,?錢松,?吳偉,?等.?相鄰交叉耦合直線開關磁阻電機位置同步控制[J].中國電機工程學報,2017,37(23):7024.
HU?Songyu,?QIAN?Song,?WU?Wei,et?al.?Position?synchronization?control?for?linear?switch?reluctance?motor?based?on?adjacent?crosscoupling?[J].?Proceedings?of?the?CSEE,2017,37(23):7024.
[7]?HAN?J?Q.From?PID?to?active?disturbance?rejection?control?[J].?IEEE?Transactions?on?Industrial?Electronics,2009,56(3):900.
[8]?周凱,?孫彥成,?王旭東,?等.?永磁同步電機的自抗擾控制調速策略[J].電機與控制學報,2018,22(2):57.
ZHOU?Kai,?SUN?Yancheng,?WANG?Xudong,?et?al.Active?disturbance?rejection?control?of?PMSM?speed?control?system?[J].?Electric?Machines?and?Control,2018,22(2):57.
[9]?劉丙友,?竺長安,?郭興眾,?等.?基于改進型ADRC的永磁同步電機轉子位置角控制方法[J].電機與控制學報,2017,21(12):24.
LIU?Bingyou,?ZHU?Changan,?GUO?Xingzhong,?et?al.?Control?strategy?for?the?rotor?position?angle?of?permanent?magnet?synchronous?motor?based?on?an?improved?ADRC?[J].?Electric?Machines?and?Control,2017,21(12):24.
[10]?左月飛,?張捷,?劉闖,?等.?基于自抗擾控制的永磁同步電機位置伺服系統一體化設計[J].?電工技術學報,2016,31(11):51.
ZUO?Yuefei,?ZHANG?Jie,?LIU?Chuang,?et?al.?Integrated?design?for?permanent?magnet?synchronous?motor?servo?systems?based?on?active?disturbance?rejection?control?[J].?Transactions?of?China?Electrotechnical?Society,2016,31(11):51.
[11]?孫凱,?許鎮琳,?蓋廓,?等.?基于自抗擾控制器的永磁同步電機位置伺服系統[J].中國電機工程學報,2007,27(15):43.
SUN?Kai,?XU?Zhenlin,?GAI?Kuo,?et?al.?A?novel?position?controller?of?pmsm?servo?system?based?on?activedisturbance?rejection?controller?[J].Proceedings?of?the?CSEE,2007,27(15):43.
[12]?賀虎成,?孫磊,?張玉峰,?等.?基于矢量控制的異步電機自抗擾控制[J].電機與控制學報,2019,23(4):120.
HE?Hucheng,?SUN?Lei,?ZHANG?Yufeng,?et?al.?Asynchronous?motor?active?disturbance?rejection?control?based?on?vector?control?[J].?Electric?Machines?and?Control,?2019,23(4):120.
[13]?杜博超,?韓守亮,?張超,?等.?基于自抗擾控制器的內置式永磁同步電機無位置傳感器控制[J].電工技術學報,2017,32(3):105.
DU?Bochao,?HAN?Shouliang,?ZHANG?Chao,?et?al.Sensorless?control?of?interior?permanent?magnet?synchronous?motor?based?on?active?disturbance?rejection?controller?[J].?Transactions?of?China?Electrotechnical?Society,2017,32(3):105.
[14]?王麗君,?李擎,?童朝南,?等.?時滯系統的自抗擾控制綜述[J].?控制理論與應用,2013,30(12):1521.
WANG?Lijun,?LI?Qing,?TONG?Chaonan,?et?al.Overview?of?active?disturbance?rejection?control?for?systems?with?timedelay?[J].?Control?Theory?&?Applications,2013,30(12):1521.
[15]?韓京清,?袁露林.?跟蹤-微分器的離散形式[J].系統科學與數學,1999,19(3):268.
HAN?Jinqing,?YUAN?Lulin.?The?discrete?form?of?trackingdifferentiator?[J].?Journal?of?systems?science?and?mathematical?sciences,1999,19(3):268.
[16]?韓京清.?自抗擾控制技術-估計補償不確定因素的控制技術[M].北京:國防工業出版社,2008:184–197.
(編輯:姜其鋒)
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49