編組站綜合自動化計劃協(xié)同管理的研究
2019-01-26 02:26:26吳惠娜
鐵道貨運 2019年1期
吳惠娜
(中國鐵路廣州局集團有限公司 運輸處,廣東 廣州 510088)
編組站綜合自動化系統(tǒng),由計劃管理信息子系統(tǒng)、集中控制子系統(tǒng)和作業(yè)過程控制子系統(tǒng)構成[1]。編組站計劃協(xié)同管理是在編組站綜合自動化系統(tǒng)計劃管理信息子系統(tǒng)和集中控制子系統(tǒng)的基礎上,建立局-站運輸調度數據智能共享平臺,實現調度計劃與作業(yè)執(zhí)行信息深度融合以及局-站計劃協(xié)調管理和自動調整[2]。
1 編組站作業(yè)過程分析
1.1 技術作業(yè)過程
編組站的技術作業(yè)是非常繁雜的過程,是一個動態(tài)變化、影響因素很多的隨機運輸調度服務系統(tǒng),技術作業(yè)可分為到達作業(yè)、解體作業(yè)、編組作業(yè)、出發(fā)作業(yè)4個過程。在綜合自動化系統(tǒng)中,這4個作業(yè)過程均包含管理信息處理、集中控制、作業(yè)過程控制3個層次。編組站技術作業(yè)過程如圖1所示。
(1)到達和解體作業(yè)過程。列車到達前,到達車流詳細信息已存于確報數據庫中,車站根據鐵路局集團公司日班計劃編制本站班計劃和階段計劃。列車到達時,系統(tǒng)自動采集列車到達時刻,通過車號自動識別系統(tǒng)自動核對確報。貨檢、列檢、機車入庫、列尾等相關作業(yè)按程序進行,作業(yè)通知信息由系統(tǒng)應用程序處理,并將列車到達信息和鉤計劃信息傳至過程控制子系統(tǒng)[3],過程控制子系統(tǒng)根據列車到達計劃和控制表,自動排列列車到達進路,駝峰自動化系統(tǒng)根據調車鉤計劃分解轉換后的指令序列執(zhí)行駝峰調車,實現列車自動解體,解體作業(yè)結束信息反饋給信息處理系統(tǒng)。
(2)列車編組和出發(fā)作業(yè)過程。車站根據鐵路局集團公司計劃編制本站班計劃和階段計劃。站調根據階段計劃和控制子系統(tǒng)反饋的實際股道、機車等信息編制調車計劃和編組計劃,系統(tǒng)自動把編組計劃信息匹配貨票信息,在預確報中形成完整的機-車-貨關聯信息。
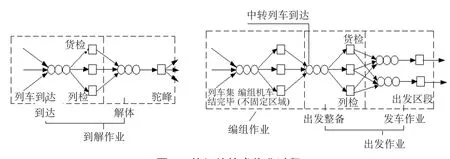
圖1 編組站技術作業(yè)過程Fig.1 Marshalling yard operation process
2 編組站計劃協(xié)同優(yōu)化研究
編組站綜合自動化計劃協(xié)同優(yōu)化基于“局-站運輸調度數據智能共享平臺”。數據共享平臺應包括鐵路局集團公司調度計劃、現車管理、貨運管理、機車應用計劃、車輛扣檢修計劃、TDCS/CTC、STP、駝峰等相關系統(tǒng)信息。計劃協(xié)同優(yōu)化包括鐵路局集團公司和車站班計劃和階段計劃協(xié)同優(yōu)化和自動調整、車站調車作業(yè)計劃輔助自動調整,編組站計劃協(xié)調優(yōu)化是提供調度計劃質量和管控智能化的關鍵環(huán)節(jié)[4]。
2.1 計劃的內容和依據
(1)班計劃。編組站班計劃包括列車到達計劃、列車出發(fā)計劃、直通列車計劃、卸車計劃、裝車計劃、各車場解編任務、貨物作業(yè)車、場間交換車等[5]。
(2)階段計劃。編制內容包括本階段列車運行計劃、到發(fā)線運用安排、解編作業(yè)要求,車流接續(xù)和交換、交遞取送、作業(yè)車上線要求,機車交路、施工(維修)計劃和本階段工作關鍵及措施。
(3)調車計劃。根據列車日班工作計劃和階段計劃,本務機返段、調車機車動態(tài)、股道應用、現車分布、預確報、車流接續(xù)、等信息,系統(tǒng)自動形成車站的到達解體計劃和出發(fā)編組計劃,股道應用計劃、調機和駝峰計劃、解體編組順序以及取送車時機,同時形成準確的列車接入和出發(fā)信息,并通過集中控制子系統(tǒng)分解處理后傳至作業(yè)過程控制子系統(tǒng)進行自動控制。
2.2 局-站計劃協(xié)同優(yōu)化
編組站作業(yè)是一個復雜的過程,調度所難以實時掌握編組站內股道及各種設備的動態(tài)變化和編制計劃輪廓信息。車站根據鐵路局集團公司計劃內容,結合現場實際情況調整計劃。因此,調度所、編組站在同一個數據平臺中協(xié)同編制日班計劃、階段計劃,調度所編制班計劃下達至車站,車站確認現場設備狀況后反饋至調度所,調度所對班計劃進行分解為階段計劃并下達至車站。車站根據作業(yè)控制系統(tǒng)反饋的股道應用、駝峰、機車等現場實際,結合最近區(qū)域車流情況、運輸重點事項、現在車結存、接車和解體的順序及時間、出發(fā)列車的編制內容和車流等信息,由集中控制子系統(tǒng)經過算法模型處理,自動提供階段計劃調整的方案,由車站確認后信息反饋至調度所,如此循環(huán),以實現局-站計劃協(xié)同編制。
2.3 階段計劃自動調整
編組站階段計劃是班計劃的具體工作安排,是編組站作業(yè)計劃的主體,是細化的班計劃。通常一個班計劃分為各階段計劃,階段計劃對車站的技術作業(yè)正常進行起著重要的作用,對車站的全局工作具有指導作用。階段計劃的兌現率的高低直接體現編組站運輸組織的水平。階段計劃優(yōu)化在局-站和站區(qū)作業(yè)管理信息、管-控信息充分共享的前提下,需考慮動態(tài)影響因素。影響階段計劃變化的因素有很多,最常見的具體影響因素為車流接續(xù)、到發(fā)線使用、調機安排3個方面。由于這3個方面之間互相作用,相互相成,因此,在設計模型算法中,一般采用分解和迭代的方式。
2.3.1 車流配置
編組站的車流信息是階段計劃配流的核心問題,準確掌握編組站的車流信息,是提高階段計劃兌現率的保證,由預確報系統(tǒng)中獲取的本階段到達列車,由于某些原因晚點,或無法到達,而該列車的部分車輛正好是等待編組的出發(fā)列車的待編車列。這就造成原車流來源發(fā)生變動,此時就要對原階段配流計劃做出相應的調整。
編制出發(fā)列車的車流來源的要滿足2個基本約束條件,一是編組計劃的約束,二是車流接續(xù)時間的約束。編發(fā)列車應遵循正點、滿軸、不違編的3個基本原則,在編組列車選擇車流中,當出發(fā)列車的列車編組車數較多,車站的銜接方向較多時,在配流時,還應同時考慮接續(xù)車列的解體過程,使得列車解編協(xié)調。綜合考慮階段前后編掛的車列,對本階段計劃時間內所有的出發(fā)列車的車流來源都有保證。
編組站的配流方案,是一個確定合理的列車編組順序,其中又涉及調機、到發(fā)線運用和取送車問題,是一個多目標尋優(yōu)過程。因此,算法模型以ECGACO算法為基礎,采用多態(tài)蟻群算法的思想[6],將螞蟻社會中從事勞動的螞蟻分為3類:偵察蟻、搜索蟻和工蟻。把調機、到發(fā)線運用和取送車因素作為偵察蟻,各自作業(yè)反饋的信息作為搜索蟻,每次算法得出的配流方案作為工蟻,如此經過算法多次循環(huán),找出最優(yōu)配流方案。
2.3.2 到發(fā)線運用
編組站到發(fā)線運用計劃是階段計劃的核心,對到發(fā)線的使用需要獲取股道號和每列車占用時間2個方面的動態(tài)信息。編組站中所有到發(fā)線均可采用到發(fā)線初始化模型算法進行初始化,以得到到發(fā)線運用計劃基礎數據。設計線初始化模型算法的輸入參數為影響到發(fā)線的基本因素,主要有到發(fā)線有效長、安全間隔、列車編組計劃、運行圖、車站的咽喉、道岔、機車等具體的設備能力。
在取得到發(fā)線初始運用計劃數據的基礎上,綜合考慮到發(fā)線動態(tài)影響因素,主要有階段到發(fā)車流密集程度、列車長度、在站作業(yè)性質、站內施工計劃、機車動態(tài)運用情況等。在到發(fā)線基礎數據和動態(tài)影響因素確定的情況下,以列車動態(tài)占用到發(fā)線時間最短為目標函數,采用蟻群算法,把到達某站的所有列車ai放在集合A中,某站所有到發(fā)線dj放進集合D中,在D中添加d0表示虛擬到發(fā)線,列車在沒有滿足約束條件的到發(fā)線時,可選擇d0。采用偏序集合的傳遞性構建了調機運用的有向圖(傳遞圖)。將調機運用描述成適合蟻群算法的形式,并初始化變量,結合滿足車站到發(fā)線使用要求的約束條件,以盡量減少交叉干擾,占有時間最短為基本目標,建立編組站到發(fā)線運用自動調整模型,對交叉干擾進行分析,考慮迭代對信息的影響,定義該問題的轉移頻率,在蟻群經過的路徑上進行信息更新,得到調機運用的最優(yōu)方案,算法結束,程序完成,如果無法選擇到發(fā)線,則轉入列車等待狀態(tài),該情況有可能是參數不合理導致算法失敗。到發(fā)線運用問題解構造圖如圖2所示。
2.3.3 機車安排
編組站作業(yè)中,機車的日常調度計劃管理工作由調度所和機務段負責,當機車計劃與實際不一致時,由車站值班員修改計劃確認實際機車號。一般每臺機車都有相對固定的作業(yè)范圍,但是受動態(tài)運輸組織變化的影響,需要優(yōu)化配置機車運用階段計劃。例如,當編組站列車到發(fā)車流不均衡時,會影響到發(fā)場及編組場股道應用,同時也影響調機運用,導致上行機車運用緊張,下行機車空閑等待,或者反之。

圖2 到發(fā)線運用問題解構造圖Fig.2 Structural map on line of arrive-start of explain
2.4 調車計劃輔助自動方案
調車作業(yè)輔助自動方案,是指由系統(tǒng)自動提供車站各股道的調車作業(yè)單的最優(yōu)方案供站調或者區(qū)長確認。階段計劃的精準度決定調車作業(yè)計劃智能編制實現的概率。在按運行圖行車的正常情況下,編組站的到達解體調車作業(yè)計劃不難實現智能編制,但是對于出發(fā)列車的編組作業(yè)計劃單智能編制,需要在信息管理子系統(tǒng)建立數據共享平臺,擴展集中控制子系統(tǒng)中的管控接口內容,用作業(yè)過程控制子系統(tǒng)反饋的現場各設備狀態(tài)和作業(yè)進度等實際信息,結合智能算法模型,在合理的約束條件下不斷自動調整階段計劃并更新調車作業(yè)計劃,從而形成調度作業(yè)單輔助自動編制方案。
2.5 站區(qū)作業(yè)計劃一體化管理
車務、機務、車輛是站區(qū)日常調度指揮工作的3個不同專業(yè),但都是圍繞車站運輸組織和調度指揮開展日常工作,彼此的作業(yè)通知必須是實時的。因此,計劃協(xié)同優(yōu)化,需要在統(tǒng)一的數據平臺上設計算法模型并開發(fā)應用軟件,或者采用SOA架構建立各子系統(tǒng)實時且雙向的數據交換接口。
2.5.1 車務-機務計劃一體管理
編組站綜合自動化的機車計劃管理,是由調度所和機務段負責。車務-機務一體化信息包括列車到發(fā)計劃、列車實際到發(fā)自動報點、機車出段與折返計劃、機車配置計劃、機車交路推算、機車出段通知、機車出段順序推算[7]、機車實際出段信息等。其中的機車交路推算需要結合階段計劃自動調整算法,匹配接發(fā)列車計劃,輸入約束條件參數,準確獲取現場機車號等實際信息。機車號的采集,可安裝車號自動識別系統(tǒng)(ATIS),把采集的機車號、時間和采集點與機車運用計劃和接發(fā)列車計劃進行自動匹配,并把匹配結果提供給鐵路局集團公司調度、車站值班員、站調等相關崗位[8],確認自動調整階段計劃和調車作業(yè)計劃。
2.5.2 車務-車輛計劃一體管理
編組站日常運輸組織中,車站與車輛段作業(yè)緊密聯系,車輛段需要預先從確報系統(tǒng)中獲取檢修車輛信息,列車到達后,列檢作業(yè),在現在車系統(tǒng)通過票據電子化接口軟件,車務電子簽收車輛回送信息,車輛通過HMIS錄入車統(tǒng)數據,車務實時簽收并組織車站作業(yè)。
3 局-站運輸調度數據共享平臺的構建
目前鐵路局集團公司生產調度管理系統(tǒng)只是單一的計劃編制系統(tǒng),沒有與現場作業(yè)執(zhí)行交互,難以提高調度計劃質量,調度計劃編制離不開動態(tài)現場信息。因此,建立局-站運輸調度數據共享平臺是提供編組站計劃智能管理的基礎。該“共享平臺”的信息包括路局班計劃、階段計劃調度命令、施工計劃等路局調度計劃信息;整合電子票據的現車、確報信息;站區(qū)車輛和機車作業(yè)信息;CTC/TDCS交互信息;集中控制子系統(tǒng)的股道運用狀態(tài)、信號機、道岔狀態(tài)、機車位置、作業(yè)進度、機車信號、速度、停車器狀態(tài)、鄰站站場、異常預警類型等信息。基于共享平臺,開發(fā)編制站與鐵路局集團公司班計劃和階段計劃協(xié)同編制、階段計劃自動調整、管控一體化、運輸調度動態(tài)分析評價的智能運輸調度系統(tǒng)。局-站運輸調度數據共享平臺結構圖如圖3所示。

圖3 局-站運輸調度數據共享平臺結構圖Fig.3 Bureau-station transport movement control data sharing structure chart
4 結束語
編組站集中了與運輸有關的各項技術設備,參與運輸過程的主要技術環(huán)節(jié)。編組站作業(yè)過程均體現在作業(yè)計劃中,作業(yè)計劃質量的提高又離不開動態(tài)現場信息,而現場作業(yè)控制子系統(tǒng)的自動化程度又來自于作業(yè)計劃的準確性,兩者相輔相成。編制站綜合自動化的作業(yè)計劃協(xié)同管理既為實現運輸組織最優(yōu)化、提高運輸效率、確保運輸安全奠定;堅實基礎,也是實現精準化管控 、區(qū)域一體、動態(tài)分析、精細考核的車站生產作業(yè)智能系統(tǒng)的關鍵一環(huán)。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中華手工(2017年2期)2017-06-06 23:00:31
故事大王(2016年7期)2016-09-22 17:30:08
中外會展(2014年4期)2014-11-27 07:46:46
兒童故事畫報(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學畫報(2009年9期)2009-09-14 03:18:56
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
