變電站巡檢機器人關鍵技術及其適用性分析
2019-02-11 10:15:26薛博水陳德凱
探索科學(學術版) 2019年6期
薛博水 陳德凱
云南電網有限責任公司昆明供電局 云南 昆明 650000
1 變電站巡檢機器人研究現狀
傳統的巡檢方式是通過巡檢人員手持紅外探測儀的檢驗方式進行巡檢,不僅耗費大量的人員精力,同時巡檢過程更是具有一定的危險性。日常巡檢工作繁重,巡檢工作量巨大,對于巡檢人員的綜合素質要求較高,此外,在城鎮區域的變電站大多建于市中心,但對于偏遠地區的變電站大多建于環境惡劣且地勢險峻的地區,同時這樣的變電站更是肩負著傳輸、分散等眾多任務,是電力網架的核心,同時人工巡檢容易出現漏檢或是誤檢等事故。
2 變電站巡檢機器人關鍵技術
2.1 機器人移動機構 移動機構的選擇關系到運動控制系統的控制策略,是巡檢機器人在變電站路況環境下高速、高精度穩定運行的重要基礎。按照機器人越障方式不同,其移動機構主要包括以下幾類:輪式、履帶式、固定軌道式等。
2.2 機器人導航控制技術 導航控制技術直接決定了變電站巡航機器人的運行精度,現階段主要使用的導航技術主要包含以下幾方面:視覺導航、慣性導航、磁軌道導航、激光反射導航及SLAM導航。不同的導航控制系統具有不同的優勢與劣勢,在具體應用時還應結合變電站實際情況進行分析應用,對于精度、生產成本以及操作性能等應采取綜合分析評價方式確定具體方式。
2.3 機器人自主充電技術 變電站巡檢機器人大都采用磷酸鐵鋰電池供電,為滿足巡檢機器人長時間、不間斷工作的供電需求,需要為巡檢機器人設置一套高效、可靠的自主充電解決方案。目前自主充電技術主要有接觸式自主充電、光能自主充電及非接觸式自主充電等。
2.4 機器人無線通信網絡 為確保巡檢機器人與后臺信息處理系統信息的實時交互,必須確保通信網絡的高效穩定,但由于較多變電站建在偏遠地區,難以確保通信網絡信號良好傳輸,現階段采用的通信網絡技術主要有WIFI與UWB等。
3 站內運維巡檢業務應用需求
站內一二次設備運維檢修業務包括巡檢、倒閘操作等,其中巡檢作業包括設備日常巡檢、設備例行試驗及設備診斷性試驗三類。對于倒閘操作可通過自動化技術改造采用電動操作機構解決。對于事故處理、設備例行試驗及設備診斷性試驗,由于其涉及因素眾多且操作復雜,需要大量憑借專業人員相關經驗,現階段智能化作業手段尚不能滿足操作需求。對于設備日常巡檢,根據《輸變電設備狀態檢修試驗規程》要求,需通過看、聽等方式檢查各設備外觀、開關位置、表計讀數、節點溫度等,其巡視周期短,其巡檢項目及要求如下表。
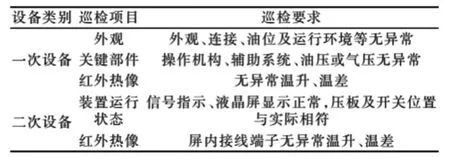
從上表可知,站內日常巡檢整體技術要求不高,但由于設備分布較廣,且數量眾多,適宜采用智能機器人技術代替人工完成此部分巡檢作業。
4 相關技術適用性評估
4.1 機器人移動機構適用性評估 對于仿生腿式結構由于其制造工藝及技術尚不成熟,近期內尚不能廣泛推廣使用,履帶式結構巡檢機器人由于其結構特點,不能進行連續越障操作,因此主要適用于地勢平坦區域。固定軌道式結構巡檢范圍廣泛但有局限性,同時能獲取變電站設備三維信息等,但其巡檢是依靠變電站內的墻體或棚頂等設施,因此適用于換流站或屏柜等設備的巡檢。輪式結構是目前引動技術中較成熟的,且操作靈活成本低等優勢,可以應用與室外設備的巡檢工作。
4.2 機器人導航控制技術適用性評估 對于變電站巡檢機器人,由于其需要定點巡檢各設備開關表計讀數,導航定位精度要求較高,因此較為可行的導航技術有激光反射導航、磁導航及SLAM導航等。激光反射導航雖然測距精度較高,但是存在檢測盲區;磁導航雖然實現成本較低,定位較為精準,但運行方式不靈活;而基于LidarSLAM的導航控制技術由于其定位精度極高、技術成熟可靠,目前高精度激光雷達已能達到厘米級定位精度,能夠適應變電站巡檢應用需求。
4.3 機器人自主充電技術適用性評估 巡檢機器人在實際使用中不僅要考慮充電設備的體積還要考慮充電功率等問題,因此目前廣泛使用的充電技術是接觸性充電技術。
4.4 機器人無線通信網絡技術適用性評估 由于高清圖像數據傳輸對無線網絡的帶寬要求較高,當前 Wi-Fi、UWB、Li-Fi均能提供10Mbps以上的傳輸帶寬。但由于UWB傳輸距離較近,若要實現變電站全區域覆蓋需要布置較多的中繼節點,而Li-Fi技術則由于技術發展尚不成熟,其傳輸距離和實現方案仍有待完善。Wi-Fi技術由于其發展較為成熟,終端支持豐富,傳輸速率較高、信號覆蓋面廣,而且對于變電站內而言設備的電源供應充裕,能很好地彌補Wi-Fi技術高功耗的缺點,較為適合作為站內巡檢機器人的無線通信傳輸的需求。
5 結語
利用智能機器人能夠有效代替人工完成站內一二次設備的日常巡檢,且其巡檢效率高。但當前巡檢機器人智能化程度仍顯不足,模式識別算法及綜合診斷分析能力仍有待提高。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
河南電力(2015年5期)2015-06-08 06:01:45
消費者報道(2014年7期)2014-07-31 11:23:57